You might also like
- Answers to Selected Exercises from Differential Equations TextbookDocument9 pagesAnswers to Selected Exercises from Differential Equations TextbookbalterNo ratings yet
- Quiz-6 Answers and Solutions: Coursera. Stochastic Processes December 30, 2020Document4 pagesQuiz-6 Answers and Solutions: Coursera. Stochastic Processes December 30, 2020sirj0_hnNo ratings yet
- Final Paul BourgadeDocument2 pagesFinal Paul BourgadeaqszaqszNo ratings yet
- Itô integral and Itô - Doeblin formula for Stochastic Differential EquationsDocument3 pagesItô integral and Itô - Doeblin formula for Stochastic Differential EquationsTấn Vũ HuỳnhNo ratings yet
- Indian Income Tax Return Acknowledgement 2021-22: Assessment YearDocument1 pageIndian Income Tax Return Acknowledgement 2021-22: Assessment YearDirector GGINo ratings yet
- Chapter 8 SDE HandwritingDocument16 pagesChapter 8 SDE HandwritingVito LiuNo ratings yet
- Ito CalculusDocument13 pagesIto CalculusChidoNo ratings yet
- MIT15 070JF13 Lec17 PDFDocument9 pagesMIT15 070JF13 Lec17 PDFnachersNo ratings yet
- Stochastic Calculus and Applications: Example Sheet 4Document2 pagesStochastic Calculus and Applications: Example Sheet 4KarenNo ratings yet
- CF_notesDocument7 pagesCF_notesHồ Nghĩa PhươngNo ratings yet
- Stochastic CalculusDocument3 pagesStochastic CalculussimeferdayNo ratings yet
- DSP4 Fourier Series - UnlockedDocument46 pagesDSP4 Fourier Series - UnlockedluisperikoNo ratings yet
- Exo ITODocument3 pagesExo ITOYamis VillegasNo ratings yet
- Module 13 - Differential Equations 2Document7 pagesModule 13 - Differential Equations 2api-3827096No ratings yet
- EEE 303 HW # 1 SolutionsDocument22 pagesEEE 303 HW # 1 SolutionsDhirendra Kumar SinghNo ratings yet
- MS PartialDocument3 pagesMS PartialAnaNo ratings yet
- MIT15 450F10 Rec03 PDFDocument9 pagesMIT15 450F10 Rec03 PDFaluiscgNo ratings yet
- DiffunderintDocument20 pagesDiffunderintdogbitesmanNo ratings yet
- DIFFERENTIATING UNDER THE INTEGRAL SIGN: A POWERFUL CALCULUS TECHNIQUEDocument28 pagesDIFFERENTIATING UNDER THE INTEGRAL SIGN: A POWERFUL CALCULUS TECHNIQUEab cNo ratings yet
- DiffunderintDocument26 pagesDiffunderintY SalahNo ratings yet
- HW 7 SolsDocument17 pagesHW 7 SolsAmal MendisNo ratings yet
- Mathematical Modeling and Computation in FinanceDocument4 pagesMathematical Modeling and Computation in FinanceĐạo Ninh ViệtNo ratings yet
- Differentiating Under The Integral SignDocument23 pagesDifferentiating Under The Integral SignsekharsamyNo ratings yet
- DiffunderintDocument28 pagesDiffunderintDhruvajyoti SahaNo ratings yet
- Math207 HW3Document2 pagesMath207 HW3PramodNo ratings yet
- Assignment 3Document2 pagesAssignment 3Ravindra ShettyNo ratings yet
- Mathematical Modeling and Computation in FinanceDocument3 pagesMathematical Modeling and Computation in FinanceĐạo Ninh ViệtNo ratings yet
- Review Brownian bridge distribution, mean and varianceDocument2 pagesReview Brownian bridge distribution, mean and varianceMoses E.M.K.TommieNo ratings yet
- Solutions Ht2009Document6 pagesSolutions Ht2009Kibet ElishaNo ratings yet
- Modeling of Sampled-Data Control Systems: 1 Ideal Sampling and The ADC ModelDocument5 pagesModeling of Sampled-Data Control Systems: 1 Ideal Sampling and The ADC ModelYassine DjillaliNo ratings yet
- Dy DX Dy DT DT DX /DT CSC CSCDocument2 pagesDy DX Dy DT DT DX /DT CSC CSCAlfredo KawengianNo ratings yet
- Dy DX Dy DT DT DX /DT CSC CSCDocument2 pagesDy DX Dy DT DT DX /DT CSC CSCAlfredo KawengianNo ratings yet
- MATH 219: Spring 2021-22Document7 pagesMATH 219: Spring 2021-22HesapNo ratings yet
- Solving first order linear ODEsDocument2 pagesSolving first order linear ODEsEarl averzosaNo ratings yet
- Caratheodory's Approximate Solutions To Stochastic Fuzzy Differential EquationsDocument6 pagesCaratheodory's Approximate Solutions To Stochastic Fuzzy Differential EquationsHo Nhat NamNo ratings yet
- Lecture 6: Introduction To Linear Dynamical Systems and ODE ReviewDocument13 pagesLecture 6: Introduction To Linear Dynamical Systems and ODE ReviewBabiiMuffinkNo ratings yet
- Lecture 6: Introduction To Linear Dynamical Systems and ODE ReviewDocument12 pagesLecture 6: Introduction To Linear Dynamical Systems and ODE ReviewBabiiMuffinkNo ratings yet
- A First Course in Differential Equations Solutions Odd Exercises PDFDocument62 pagesA First Course in Differential Equations Solutions Odd Exercises PDFFernandoNo ratings yet
- Lecture 6Document8 pagesLecture 6ranvNo ratings yet
- Appendix A:: Conservation of Mechanical Energy Conservation of Linear MomentumDocument5 pagesAppendix A:: Conservation of Mechanical Energy Conservation of Linear MomentumOliver KrausNo ratings yet
- Lec 5Document3 pagesLec 5Atom CarbonNo ratings yet
- Properties of The Wave Equation On RDocument12 pagesProperties of The Wave Equation On RElohim Ortiz CaballeroNo ratings yet
- Assignment 2b SolutionsDocument12 pagesAssignment 2b SolutionsArfaz HussainNo ratings yet
- MATH3078 PDE Waves AssignmentDocument6 pagesMATH3078 PDE Waves AssignmentDuc TuNo ratings yet
- My Notes On Faber1983Document25 pagesMy Notes On Faber1983Miguel Angel GiménezNo ratings yet
- Math 677. Fall 2009. Homework #3 SolutionsDocument3 pagesMath 677. Fall 2009. Homework #3 SolutionsRodrigo KostaNo ratings yet
- PDE Textbook (101 150)Document50 pagesPDE Textbook (101 150)ancelmomtmtcNo ratings yet
- MIT18 S096F13 Lecnote21Document7 pagesMIT18 S096F13 Lecnote21piwipebaNo ratings yet
- ECEN 314: Signals and Systems: 1 Continuous-Time ConvolutionDocument6 pagesECEN 314: Signals and Systems: 1 Continuous-Time ConvolutionJaanwar DeshNo ratings yet
- !!en3 The Fourier Transform v02Document8 pages!!en3 The Fourier Transform v02Marcela DobreNo ratings yet
- Assignment 2 Continuum Mechanics (4MT317) 2019: J J J J JDocument3 pagesAssignment 2 Continuum Mechanics (4MT317) 2019: J J J J JElvir PecoNo ratings yet
- RC2017 Signals and Systems Homework 8Document7 pagesRC2017 Signals and Systems Homework 8ferdi tayfun100% (1)
- sns_2022_중간Document2 pagessns_2022_중간juyeons0204No ratings yet
- Ex4 22Document3 pagesEx4 22Harsh RajNo ratings yet
- Mid Term Solutions PDFDocument2 pagesMid Term Solutions PDFMd Nur-A-Adam DonyNo ratings yet
- Finansmatte FSDocument1 pageFinansmatte FSGustav HägglundNo ratings yet
- Bs MldlaDocument35 pagesBs MldlaRoshan KumarNo ratings yet
- Deq11 Final SolDocument3 pagesDeq11 Final Sol陳浚維No ratings yet
- 2011 蔡淳仁 FinalDocument3 pages2011 蔡淳仁 Final陳浚維No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Chapter 7 Ito LemmaDocument30 pagesChapter 7 Ito LemmaVito Liu100% (1)
- Chapter 7Document29 pagesChapter 7Vito LiuNo ratings yet
- Conditional Expectation InsightsDocument34 pagesConditional Expectation InsightsVito LiuNo ratings yet
- Chapter 2Document33 pagesChapter 2Vito LiuNo ratings yet
- Chapter 1Document11 pagesChapter 1Vito LiuNo ratings yet
- Chapter 0Document8 pagesChapter 0Vito LiuNo ratings yet
- Experience authentic Rajasthani flavorsDocument12 pagesExperience authentic Rajasthani flavorsTejasvee Tandon Jaipuria JaipurNo ratings yet
- Monopolistic Competition-1Document24 pagesMonopolistic Competition-1Rishbha patelNo ratings yet
- Cambridge IGCSE: 0450/12 Business StudiesDocument12 pagesCambridge IGCSE: 0450/12 Business Studiessuurekha vaishliNo ratings yet
- Item No. Part No. Name of Part Material No. Reqd DescriptionDocument3 pagesItem No. Part No. Name of Part Material No. Reqd Descriptionmantilla7No ratings yet
- Class 12 Accountancy Question Bank Nov 2023Document105 pagesClass 12 Accountancy Question Bank Nov 2023vansh555palNo ratings yet
- Amsino Waste-Fluid-Management Brochure US 08-25-22 PDFDocument36 pagesAmsino Waste-Fluid-Management Brochure US 08-25-22 PDFjose vilchezNo ratings yet
- qCh.3 Topic 2-Taxes (Direct and Indirect)Document7 pagesqCh.3 Topic 2-Taxes (Direct and Indirect)Joshua MaNo ratings yet
- Variable Costing Performance ReportingDocument66 pagesVariable Costing Performance ReportingAaminah BeathNo ratings yet
- PR Fidelity-Bonding-Online FinalDocument2 pagesPR Fidelity-Bonding-Online FinaljessNo ratings yet
- P.Yuvaraj: Advocate Office:: No. 160, G-9, Hussain PlazaDocument4 pagesP.Yuvaraj: Advocate Office:: No. 160, G-9, Hussain PlazaShruthi VenkatachalapathiNo ratings yet
- Agreement For Consulting Services Template SampleDocument6 pagesAgreement For Consulting Services Template SampleLegal ZebraNo ratings yet
- 1 Allowable Stress CS MaterialDocument8 pages1 Allowable Stress CS MaterialImtiaz NusratNo ratings yet
- Arma 1Document4 pagesArma 1Lâm Anh VũNo ratings yet
- Mini CerditaDocument6 pagesMini CerditaKaren OssesNo ratings yet
- Draft Resolution TemplateDocument5 pagesDraft Resolution TemplateMuhammad ArielNo ratings yet
- Cloud - Midnaporecollege.ac - in Studentportal SP Printreceipt22.aspx PDFDocument1 pageCloud - Midnaporecollege.ac - in Studentportal SP Printreceipt22.aspx PDFMaitraNo ratings yet
- Advising Bank Uob: Irrevocable Non TransferableDocument4 pagesAdvising Bank Uob: Irrevocable Non TransferableHarry MdnNo ratings yet
- B. Sc. (Hons.) Nursing Selection List 1: Fee Details Head FeeDocument3 pagesB. Sc. (Hons.) Nursing Selection List 1: Fee Details Head FeeMovieBuff YoNo ratings yet
- Bab 10 Anggaran FleksibelDocument73 pagesBab 10 Anggaran FleksibelAdinda Novia SariNo ratings yet
- BPCL Event Manager TenderDocument40 pagesBPCL Event Manager TenderTender 247No ratings yet
- Visible BookDocument380 pagesVisible BookLong VuNo ratings yet
- NASM20426Document6 pagesNASM20426Konelek AeroNo ratings yet
- Indian Institute of Management Rohtak: Interim Final Placement ReportDocument9 pagesIndian Institute of Management Rohtak: Interim Final Placement Reportalpana chatterjeeNo ratings yet
- Invoice Letter 11 Nov 2021Document8 pagesInvoice Letter 11 Nov 2021Suvi AzkaNo ratings yet
- Quiz 1Document3 pagesQuiz 1Shakshi SharmaNo ratings yet
- Contactos Arg-ColombiaDocument40 pagesContactos Arg-ColombiaJuan Angel Gonzalez CamposNo ratings yet
- Activity-Based Management and Activity-Based Costing: Cost Accounting: Foundations and Evolutions, 8eDocument37 pagesActivity-Based Management and Activity-Based Costing: Cost Accounting: Foundations and Evolutions, 8eErika Dawn BalderasNo ratings yet
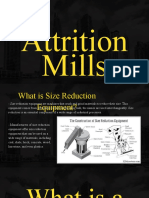
- FELIPE Week 7 Size ReductionDocument19 pagesFELIPE Week 7 Size ReductionRaymond FelipeNo ratings yet
- X58 X60 Timetable ScotlandDocument5 pagesX58 X60 Timetable ScotlandDaniel SchaeferNo ratings yet