You might also like
- 1 Eigenvalues and Eigenvectors: Lecture 3: October 5, 2021Document5 pages1 Eigenvalues and Eigenvectors: Lecture 3: October 5, 2021Pushkaraj PanseNo ratings yet
- 2 StatesDocument10 pages2 StatesVinayak DuttaNo ratings yet
- 4 Mathematical Preliminaries: 4.1 Linear Vector SpaceDocument23 pages4 Mathematical Preliminaries: 4.1 Linear Vector SpaceSURESH SURAGANINo ratings yet
- Block 1Document18 pagesBlock 1muay88No ratings yet
- Multilinear Algebra - MITDocument141 pagesMultilinear Algebra - MITasdNo ratings yet
- Linear Methods of Applied Mathematics Evans M. Harrell II and James V. HerodDocument16 pagesLinear Methods of Applied Mathematics Evans M. Harrell II and James V. Herodjose2017No ratings yet
- Hudyma AlexDocument33 pagesHudyma AlexYogakeerthigaNo ratings yet
- Invariant SubspacesDocument7 pagesInvariant SubspacesDipro MondalNo ratings yet
- Differential FormsDocument16 pagesDifferential FormsNorberto FrutaNo ratings yet
- Vectors in Linear SpacesDocument20 pagesVectors in Linear SpacesValentio100% (1)
- Quotient Vector Spaces ExplainedDocument5 pagesQuotient Vector Spaces ExplainedVATSAL KEDIANo ratings yet
- Linear Transform Theory in 6 StepsDocument12 pagesLinear Transform Theory in 6 StepsAriana Ribeiro LameirinhasNo ratings yet
- Cmi Linear Algebra Full NotesDocument83 pagesCmi Linear Algebra Full NotesNaveen suryaNo ratings yet
- Differential FormsDocument10 pagesDifferential FormspianochemikerNo ratings yet
- Lecture 1Document31 pagesLecture 1Aziz RofiuddarojadNo ratings yet
- Fourier 12Document13 pagesFourier 12Dushyant SinghNo ratings yet
- Lecture13 AuroraDocument9 pagesLecture13 Auroramartin701107No ratings yet
- Lecture LinearAlgebraDocument8 pagesLecture LinearAlgebra915431916No ratings yet
- MinpolyandappnsDocument14 pagesMinpolyandappnsMahimaNo ratings yet
- Appendix 1Document4 pagesAppendix 1Priyatham GangapatnamNo ratings yet
- Linear Transformations and Matrices Math 130 Linear AlgebraDocument4 pagesLinear Transformations and Matrices Math 130 Linear AlgebraCody SageNo ratings yet
- Chap2 ThomasDocument21 pagesChap2 ThomasLdtc ZerrotNo ratings yet
- Hilbert Spaces ExplainedDocument32 pagesHilbert Spaces ExplainedSimi ChoudhuryNo ratings yet
- Lecture 1 - NewDocument8 pagesLecture 1 - NewFares FathyNo ratings yet
- Prabhat Chowdhury PDFDocument295 pagesPrabhat Chowdhury PDFArkadebSenguptaNo ratings yet
- Diagonalizable Operators Math 130 Linear Algebra: 1 2 K I I 1 2 KDocument2 pagesDiagonalizable Operators Math 130 Linear Algebra: 1 2 K I I 1 2 KCody SageNo ratings yet
- 1 Linear Spaces: Summer Propaedeutic CourseDocument15 pages1 Linear Spaces: Summer Propaedeutic CourseJuan P HDNo ratings yet
- MATH 2020 - Linear Algebra EssentialsDocument36 pagesMATH 2020 - Linear Algebra EssentialsShiyeng CharmaineNo ratings yet
- 0 Short Review of Some Mathematics, Nomenclature and NotationDocument14 pages0 Short Review of Some Mathematics, Nomenclature and NotationWong Zam MingYinNo ratings yet
- Dirac Notation and Basic Linear Algebra For Quantum ComputingDocument4 pagesDirac Notation and Basic Linear Algebra For Quantum ComputingsarhahhNo ratings yet
- LA Part1 2in1Document166 pagesLA Part1 2in1闇玥No ratings yet
- Lecture 2: Linear Operators: IIT KanpurDocument13 pagesLecture 2: Linear Operators: IIT KanpurpratapsahooNo ratings yet
- Lecture 3: Perturbative Renormalization (Continued) : 3.1. Local Functionals in A Classical Eld TheoryDocument17 pagesLecture 3: Perturbative Renormalization (Continued) : 3.1. Local Functionals in A Classical Eld TheoryluisdanielNo ratings yet
- Graph Draw NotesDocument10 pagesGraph Draw NotesGuifré Sánchez SerraNo ratings yet
- Rosas-Ortiz: 1 Linear SpacesDocument20 pagesRosas-Ortiz: 1 Linear SpacesJaime TiburcioNo ratings yet
- VectorCalculus PDFDocument31 pagesVectorCalculus PDFMaria Hidalgo MurilloNo ratings yet
- Functional AnalysisDocument73 pagesFunctional Analysisyashwantmoganaradjou100% (1)
- Functional Analysis Lecture NotesDocument38 pagesFunctional Analysis Lecture Notesprasun pratikNo ratings yet
- Jordan normal form theorem proofDocument5 pagesJordan normal form theorem proofAlexandre DieguezNo ratings yet
- Notes On Eigenvalues 1Document9 pagesNotes On Eigenvalues 1Vivian BiryomumaishoNo ratings yet
- Matias AlgebraicDocument12 pagesMatias AlgebraicMatias Carl RelyeaNo ratings yet
- Diagonalizable Operators Math 130 Linear Algebra: 1 2 K I I 1 2 KDocument2 pagesDiagonalizable Operators Math 130 Linear Algebra: 1 2 K I I 1 2 KRobert DyllNo ratings yet
- Functional AnalysisDocument73 pagesFunctional AnalysisGVFNo ratings yet
- QUANTUM NOTES: Matrix Analysis - Linear Algebra On Complex Scalar Product SpacesDocument31 pagesQUANTUM NOTES: Matrix Analysis - Linear Algebra On Complex Scalar Product SpacesMihaly WeinerNo ratings yet
- Appendix A: A.1 Gratuitous Mathematics: Definitions of Vector SpacesDocument12 pagesAppendix A: A.1 Gratuitous Mathematics: Definitions of Vector SpacesnefizeNo ratings yet
- Anin Mimos MathDocument24 pagesAnin Mimos MathAtul NipaneNo ratings yet
- Unit 10 Eigenvalctes and Eigenvectors: StructureDocument18 pagesUnit 10 Eigenvalctes and Eigenvectors: StructureSajal KumarNo ratings yet
- Mathematical Methods of PhysicsDocument70 pagesMathematical Methods of Physicsaxva1663No ratings yet
- CS168 Spectral Graph Theory (Roughgarden & Valiant)Document11 pagesCS168 Spectral Graph Theory (Roughgarden & Valiant)Noppawee ApichonpongpanNo ratings yet
- CS168: The Modern Algorithmic Toolbox Lectures #11: Spectral Graph Theory, IDocument7 pagesCS168: The Modern Algorithmic Toolbox Lectures #11: Spectral Graph Theory, IAndropov AjebuaNo ratings yet
- Linear Algebra of Quantum Mechanics and The Simulation of A Quantum ComputerDocument9 pagesLinear Algebra of Quantum Mechanics and The Simulation of A Quantum Computeraniruddhamishra26No ratings yet
- IIT Kanpur Lecture on Online Learning and OptimizationDocument8 pagesIIT Kanpur Lecture on Online Learning and OptimizationRohit PrasadNo ratings yet
- 18.952 Differential FormsDocument63 pages18.952 Differential FormsAngelo OppioNo ratings yet
- NOTES-Intro To Hilbert SpacesDocument28 pagesNOTES-Intro To Hilbert SpacesdebmallyNo ratings yet
- IJEART01014Document5 pagesIJEART01014erpublicationNo ratings yet
- CH 5 Vec & TenDocument40 pagesCH 5 Vec & TenDawit AmharaNo ratings yet
- The Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64From EverandThe Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64No ratings yet
- Module 6 Questions and AnswersDocument10 pagesModule 6 Questions and AnswersProject InfoNo ratings yet
- Quiz Bowl QuestionsDocument8 pagesQuiz Bowl QuestionsKeenan Dave RivoNo ratings yet
- Paths To Mastery Lesson 17 Speaking Tips From Dale Carnegie The Quick and Easy Way To Effective SpeakingDocument10 pagesPaths To Mastery Lesson 17 Speaking Tips From Dale Carnegie The Quick and Easy Way To Effective SpeakingZelic NguyenNo ratings yet
- Group No 5 - Ultratech - Jaypee 20th Sep-1Document23 pagesGroup No 5 - Ultratech - Jaypee 20th Sep-1Snehal100% (1)
- 5-Page Proposal Writing GuideDocument2 pages5-Page Proposal Writing GuideJason McCoyNo ratings yet
- Biology and Aquaculture of Tilapia-Routledge (2022)Document324 pagesBiology and Aquaculture of Tilapia-Routledge (2022)Pablo Antonio Pintos TeránNo ratings yet
- B.sc. Microbiology 1Document114 pagesB.sc. Microbiology 1nasitha princeNo ratings yet
- Intro to Phenomenological ApproachesDocument11 pagesIntro to Phenomenological ApproachesToshi ToshiNo ratings yet
- Inelastic Response SpectrumDocument10 pagesInelastic Response Spectrummathewsujith31No ratings yet
- Everyman A Structural Analysis Thomas F. Van LaanDocument12 pagesEveryman A Structural Analysis Thomas F. Van LaanRodrigoCarrilloLopezNo ratings yet
- GasGas TXT Racing 2014 Owner's ManualDocument60 pagesGasGas TXT Racing 2014 Owner's Manualstone chouNo ratings yet
- (English (Auto-Generated) ) Reviving The Labor Movement - Margaret Levi - TEDxSeattle (DownSub - Com)Document14 pages(English (Auto-Generated) ) Reviving The Labor Movement - Margaret Levi - TEDxSeattle (DownSub - Com)Surat PEHKTNo ratings yet
- Underwater Cutting and Welding Equipment - 89250054 - AbDocument38 pagesUnderwater Cutting and Welding Equipment - 89250054 - AbAhmed Adel100% (1)
- Information Prepared by The Project Gutenberg Legaladvisor: MokshaDocument2 pagesInformation Prepared by The Project Gutenberg Legaladvisor: MokshaMunnur PandariNo ratings yet
- ADL Report "Attacking" Press TVDocument20 pagesADL Report "Attacking" Press TVGordon DuffNo ratings yet
- CUCM BK F3AC1C0F 00 Cucm Features Services Guide 100Document1,158 pagesCUCM BK F3AC1C0F 00 Cucm Features Services Guide 100shan76palNo ratings yet
- Housing Inequality Causes and SolutionsDocument5 pagesHousing Inequality Causes and SolutionsFredrickNo ratings yet
- Tourist Spot in Ilocos Norte PhilippinesDocument1 pageTourist Spot in Ilocos Norte Philippinescharlie besabellaNo ratings yet
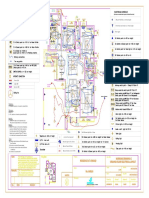
- Varun Valanjeri Electrical Layout-3Document1 pageVarun Valanjeri Electrical Layout-3ANOOP R NAIRNo ratings yet
- 9th Science Mcqs PTB PDFDocument25 pages9th Science Mcqs PTB PDFUmar JuttNo ratings yet
- Forming Plurals of NounsDocument5 pagesForming Plurals of NounsCathy GalNo ratings yet
- Alora Sealord History, How and Why They Were FormedDocument1 pageAlora Sealord History, How and Why They Were Formedgoddessjanefire003No ratings yet
- Sales Confirmation: Alpha Trading S.P.A. Compagnie Tunisienne de NavigationDocument1 pageSales Confirmation: Alpha Trading S.P.A. Compagnie Tunisienne de NavigationimedNo ratings yet
- Integrating JasperReports To PHPDocument10 pagesIntegrating JasperReports To PHPrupinder_3061463No ratings yet
- Cing - Common Interface For NMR Structure Generation: Results 1 - 10 of 978Document3 pagesCing - Common Interface For NMR Structure Generation: Results 1 - 10 of 978Judap FlocNo ratings yet
- Revised SCOPE OF WORK and SCCDocument363 pagesRevised SCOPE OF WORK and SCCZia KhanNo ratings yet
- ICT4D - Richard Heeks (2305843009216382716)Document307 pagesICT4D - Richard Heeks (2305843009216382716)Jeff GeoffNo ratings yet
- Pricelist PT SCB Maret 2023Document11 pagesPricelist PT SCB Maret 2023PT RUKUN CAHAYA ABADINo ratings yet
- Impact of MusicDocument15 pagesImpact of MusicSterling GrayNo ratings yet
- People Vs Sindiong & PastorDocument4 pagesPeople Vs Sindiong & PastorErby Jennifer Sotelo-GesellNo ratings yet