You might also like
- Structural GeologyDocument18 pagesStructural Geologysivabharathamurthy100% (1)
- Variogram Interpretation and ModelingDocument28 pagesVariogram Interpretation and Modelingmelvincabe67% (3)
- Assignment GeologyDocument9 pagesAssignment GeologyWaleed Al MesariNo ratings yet
- Geological MappingDocument20 pagesGeological MappingIkhwan Z.100% (13)
- Kink MethodDocument7 pagesKink MethodOktoberiman SNo ratings yet
- Python Programming and Numerical Methods - A Guide For Engineers and Scientists - Python Numerical MethodsDocument5 pagesPython Programming and Numerical Methods - A Guide For Engineers and Scientists - Python Numerical MethodsCharles StewartNo ratings yet
- Chemistry For Grade 10 BookDocument3 pagesChemistry For Grade 10 BookHollyNo ratings yet
- Solutions To Problems in Book PDFDocument19 pagesSolutions To Problems in Book PDFAdv. Govind S. TehareNo ratings yet
- Paleocurrent Data AnalysisDocument20 pagesPaleocurrent Data AnalysisArijit LaikNo ratings yet
- 3D Curvature Attributes - A New Approach For Seismic InterpretationDocument8 pages3D Curvature Attributes - A New Approach For Seismic InterpretationWoi Loon100% (1)
- Map Projections and Coordinate SystemDocument7 pagesMap Projections and Coordinate SystemjparamNo ratings yet
- Dershowitz 1988Document31 pagesDershowitz 1988rNo ratings yet
- Boyer and Elliot 1982. Thrust SystemsDocument36 pagesBoyer and Elliot 1982. Thrust SystemsSofia Carolina AvellanedaNo ratings yet
- Strain EllipsoidDocument7 pagesStrain EllipsoidArkaprabha Sarkar100% (1)
- Eg Unit 3.2Document22 pagesEg Unit 3.2Shaik Asif Ali civilNo ratings yet
- 1993 JoSG Strain Kinematic Analysis General Shear Zones PDFDocument20 pages1993 JoSG Strain Kinematic Analysis General Shear Zones PDFLalit JoshiNo ratings yet
- Improving 20structural 20seismic 20interpretation 20using 203D 20curvature 20attributesDocument3 pagesImproving 20structural 20seismic 20interpretation 20using 203D 20curvature 20attributesMahmoud EloribiNo ratings yet
- 05 Introducction To Structural Geology, Allmendinger, 1999-21-40Document20 pages05 Introducction To Structural Geology, Allmendinger, 1999-21-40RaquelChangNo ratings yet
- Judging The Shape of Moving Objects: Discriminating Dynamic AnglesDocument13 pagesJudging The Shape of Moving Objects: Discriminating Dynamic AnglesAndrew LewisNo ratings yet
- Structural AnalysisDocument15 pagesStructural AnalysisS Hashim RizviNo ratings yet
- Geomorphometry and Landform Mapping, What Is A LandformDocument13 pagesGeomorphometry and Landform Mapping, What Is A LandformSaxenaNo ratings yet
- (Yielding Graham, 2016) The Geometry of Branch LinesDocument12 pages(Yielding Graham, 2016) The Geometry of Branch LinesAiwarikiaarNo ratings yet
- McPherron Et Al. (2005)Document20 pagesMcPherron Et Al. (2005)Lucas TheriaultNo ratings yet
- Ranalli 1974Document8 pagesRanalli 1974Som DevNo ratings yet
- A 50-Year Retrospective Review of Three-Dimensional Effects at Cracks in Sharp NotchesDocument25 pagesA 50-Year Retrospective Review of Three-Dimensional Effects at Cracks in Sharp NotchesAnne Beatriz MendesNo ratings yet
- Chonghui Suo, Shimi Peng, Suoliang Chang, Rutai Duan, Guangming WangDocument7 pagesChonghui Suo, Shimi Peng, Suoliang Chang, Rutai Duan, Guangming Wangtavakkoli.meyssamNo ratings yet
- Introduction To Geological MapsDocument14 pagesIntroduction To Geological MapsIshtiaq AhmadNo ratings yet
- Noaa 2827 DS1Document279 pagesNoaa 2827 DS1NhatlinhNo ratings yet
- NDX ChopraDocument6 pagesNDX ChopraPrana TobingNo ratings yet
- Lab 2BDocument9 pagesLab 2BalipNo ratings yet
- Three-Dimensional Effects For Supported Excavations in ClayDocument34 pagesThree-Dimensional Effects For Supported Excavations in ClayQassun MohammedNo ratings yet
- Riller Et Al, 2017Document16 pagesRiller Et Al, 2017TascaNo ratings yet
- Linear Algebra in EarthSci.Document30 pagesLinear Algebra in EarthSci.Muzmmil Mian100% (1)
- Erin-Bethell@cmail - Carleton.ca: 1278.pdf 51st Lunar and Planetary Science Conference (2020)Document2 pagesErin-Bethell@cmail - Carleton.ca: 1278.pdf 51st Lunar and Planetary Science Conference (2020)Erin BethellNo ratings yet
- Liu-Zheng Et Al. (2005) - The Effect of Slip Variability On Earthquuake Slip-Length ScalingDocument9 pagesLiu-Zheng Et Al. (2005) - The Effect of Slip Variability On Earthquuake Slip-Length ScalingrihongkeeNo ratings yet
- Visualization in 3-D Seismic Interpretation: Orizon Attributes and Structure. inDocument5 pagesVisualization in 3-D Seismic Interpretation: Orizon Attributes and Structure. inMohamed Ibrahim ShihataaNo ratings yet
- Pseudo 3-D Modeling of Trishear Fault-Propagation Folding: Ernesto O. Cristallini, Richard W. AllmendingerDocument17 pagesPseudo 3-D Modeling of Trishear Fault-Propagation Folding: Ernesto O. Cristallini, Richard W. AllmendingernelaymsNo ratings yet
- Engr. Gretchen Naneth G. Plaza, Ge InstructorDocument28 pagesEngr. Gretchen Naneth G. Plaza, Ge InstructorPearl LoskiNo ratings yet
- Finno Et Al-2005-Evaluating Damage Potential in Buildings Affected by ExcavationsDocument40 pagesFinno Et Al-2005-Evaluating Damage Potential in Buildings Affected by ExcavationsanarNo ratings yet
- Structural Trend Analysis by Axial Surface Mapping1Document22 pagesStructural Trend Analysis by Axial Surface Mapping1Pedro Henrique Vogt SilveiraNo ratings yet
- Quantitative Geometry of Thrust and Fold Belt StructuresDocument28 pagesQuantitative Geometry of Thrust and Fold Belt StructuresIrfan BaigNo ratings yet
- Journal of Geophysical Research Solid Earth - 1997 - Simpson - Quantifying Anderson S Fault TypesDocument11 pagesJournal of Geophysical Research Solid Earth - 1997 - Simpson - Quantifying Anderson S Fault TypesILHAM ARAZIQNo ratings yet
- Gringarten Deutsch 2001 - Variogram Interpretation and ModelingDocument28 pagesGringarten Deutsch 2001 - Variogram Interpretation and ModelingFabián CárdenasNo ratings yet
- Digital Terrain ModellingDocument33 pagesDigital Terrain ModellingPatricia Diaz100% (1)
- Mapping Geologic Features Using Seismic Curvature : Satinder Chopra and Kurt J. MarfurtDocument10 pagesMapping Geologic Features Using Seismic Curvature : Satinder Chopra and Kurt J. Marfurthmehmood123No ratings yet
- First and Second Week AssessmentDocument10 pagesFirst and Second Week Assessmentwike rosalinaNo ratings yet
- FoldsDocument34 pagesFoldsDheo Aldava100% (1)
- Introduction To Structural GeologyDocument88 pagesIntroduction To Structural GeologyDonald Obreque QuianNo ratings yet
- BarretDocument11 pagesBarretMaría Emilia TorresNo ratings yet
- 3-D Structural GeologyDocument411 pages3-D Structural GeologySuri Sorby RSNo ratings yet
- A Comparison of Differential Calculus and Differential Geometry in Two DimensionsDocument8 pagesA Comparison of Differential Calculus and Differential Geometry in Two DimensionsMuhammed MagidNo ratings yet
- Basic Seismology-Shearer (USGS)Document61 pagesBasic Seismology-Shearer (USGS)jcpchin2No ratings yet
- Estimation of Fault Propagation Distance From Fold ShapeDocument4 pagesEstimation of Fault Propagation Distance From Fold ShapestephenNo ratings yet
- Deformation and StrainDocument16 pagesDeformation and Strainpt.22.132No ratings yet
- Shear Waves 2Document14 pagesShear Waves 2GEOMAHESHNo ratings yet
- Fault Relate EarthquakeDocument18 pagesFault Relate EarthquakeYopi SiswonoNo ratings yet
- Resúmen 2Document29 pagesResúmen 2moranrubyNo ratings yet
- 3d Paleo StressDocument4 pages3d Paleo StressRuaa Mohamed RayanNo ratings yet
- Used To, Would, Be Used To / Get Used To HomeworkDocument1 pageUsed To, Would, Be Used To / Get Used To Homeworkdiane camarena lobatoNo ratings yet
- Tarea 3 GDocument1 pageTarea 3 Gdiane camarena lobatoNo ratings yet
- Past Perfect Exercises: Had Spent WantedDocument1 pagePast Perfect Exercises: Had Spent Wanteddiane camarena lobatoNo ratings yet
- 3D CrystallographicDocument9 pages3D Crystallographicdiane camarena lobatoNo ratings yet
- Used To, Would, Be Used To / Get Used To HomeworkDocument1 pageUsed To, Would, Be Used To / Get Used To Homeworkdiane camarena lobatoNo ratings yet
- Tarea 3 GDocument1 pageTarea 3 Gdiane camarena lobatoNo ratings yet
- GRANULOMÉTRIA (Tarea)Document2 pagesGRANULOMÉTRIA (Tarea)diane camarena lobatoNo ratings yet
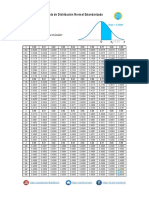
- Tabla Z Distribución Normal Estandarizada MateMovil PDFDocument1 pageTabla Z Distribución Normal Estandarizada MateMovil PDFdiane camarena lobatoNo ratings yet
- Mixed Integer Programming: NCSS Statistical SoftwareDocument7 pagesMixed Integer Programming: NCSS Statistical SoftwareAnonymous 78iAn6No ratings yet
- 3 Geometric ConstructionsDocument12 pages3 Geometric ConstructionsRashid AlmaktoumiNo ratings yet
- R07 Statistical Concepts and Market Returns IFT Notes1Document27 pagesR07 Statistical Concepts and Market Returns IFT Notes1Rezaul AlamNo ratings yet
- Cbse X Sa2 Maths WorkbookDocument21 pagesCbse X Sa2 Maths Workbookkaushik247No ratings yet
- EE 668: Models: Madhav P. Desai March 9, 2010Document3 pagesEE 668: Models: Madhav P. Desai March 9, 2010Pratik KamatNo ratings yet
- Mini ChecklistDocument2 pagesMini ChecklisttopherNo ratings yet
- Carnap - Old and New LogicDocument7 pagesCarnap - Old and New LogicVanBolhuisNo ratings yet
- GRE Math Tips For Beginners: Practice, Practice, PracticeDocument6 pagesGRE Math Tips For Beginners: Practice, Practice, PracticesowjanyaNo ratings yet
- ML 1Document51 pagesML 1DipNo ratings yet
- Essel Kofi Fosu - 3583418 - Comp Eng 3Document9 pagesEssel Kofi Fosu - 3583418 - Comp Eng 3Reagan TorbiNo ratings yet
- ACT PracticeDocument6 pagesACT Practicecakes44No ratings yet
- Nama: Asnur Saputra NIM: F1A220034 Kelas: B Prodi: S1 StatistikaDocument7 pagesNama: Asnur Saputra NIM: F1A220034 Kelas: B Prodi: S1 StatistikaAsnur SaputraNo ratings yet
- Mat 1512 (Calculus A)Document169 pagesMat 1512 (Calculus A)Anonymous 7TSpgrU100% (1)
- Publication 10 1149 6154Document4 pagesPublication 10 1149 6154shanidogar60No ratings yet
- Literature Review On Inventory Lot SizingProblemsDocument16 pagesLiterature Review On Inventory Lot SizingProblemsElvira TollaNo ratings yet
- Numerical Analysis Introduction To MATLAB ProgrammingDocument7 pagesNumerical Analysis Introduction To MATLAB ProgrammingM.S GRAPHICSNo ratings yet
- Simplex Method Using MATLAB PDFDocument5 pagesSimplex Method Using MATLAB PDFEhsan ElahiNo ratings yet
- Sets - An IntroductionDocument36 pagesSets - An IntroductionSophrina Jazmynrose CruzNo ratings yet
- Calculus (Bradley & Smith) - Instructor's EditionDocument1,107 pagesCalculus (Bradley & Smith) - Instructor's EditionmathchanNo ratings yet
- Chapter 9, Distributed Forces: Moments of Inertia: Yda YDocument22 pagesChapter 9, Distributed Forces: Moments of Inertia: Yda YRushed AlamaNo ratings yet
- EEE3094S Exam Nov 2021Document13 pagesEEE3094S Exam Nov 2021Stalin KosterNo ratings yet
- Aircraft's Equations of MotionDocument41 pagesAircraft's Equations of MotionRahis Pal SinghNo ratings yet
- Academic Performance Improvement PlanDocument4 pagesAcademic Performance Improvement PlancindyNo ratings yet
- Data InterpretationDocument37 pagesData InterpretationHimanshuNo ratings yet
- Akar Persamaan Tak Linier Tunggal PPT Dy - 2 PDFDocument14 pagesAkar Persamaan Tak Linier Tunggal PPT Dy - 2 PDFazmi_faNo ratings yet
- GR 9 Two Step Equations ANSWERSDocument2 pagesGR 9 Two Step Equations ANSWERSRudyr BacolodNo ratings yet
- MMW ReviewerDocument2 pagesMMW ReviewerPatricia May CayagoNo ratings yet
- Tute Sheet - 6 - UMA010Document2 pagesTute Sheet - 6 - UMA010Parth KatiyarNo ratings yet