You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Organisational BehaviourJan18 IVgCWRqzCT PDFDocument328 pagesOrganisational BehaviourJan18 IVgCWRqzCT PDFSajal Mittal68% (22)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- WHOLE - kUNDADocument271 pagesWHOLE - kUNDAShawn MugobiNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Chapter 2 Force Vectors Ver.1Document59 pagesChapter 2 Force Vectors Ver.1Ainul NasihaNo ratings yet
- The Tragedy of Schizophrenia Without PsychotherapyDocument30 pagesThe Tragedy of Schizophrenia Without PsychotherapyRachel AHNo ratings yet
- Unit of Work Jackie FrenchDocument17 pagesUnit of Work Jackie FrenchBianca Williams-NichollsNo ratings yet
- Ultimate Edge Journal FinalDocument119 pagesUltimate Edge Journal FinalLiew Chee KiongNo ratings yet
- TRIZ AssignmentDocument4 pagesTRIZ AssignmentAinul NasihaNo ratings yet
- Explain The Meaning of Total DerivativeDocument4 pagesExplain The Meaning of Total DerivativeAinul NasihaNo ratings yet
- Tabulation Data and Calculation Exp1Document3 pagesTabulation Data and Calculation Exp1Ainul NasihaNo ratings yet
- Cybersecurity (IoT)Document72 pagesCybersecurity (IoT)Ainul NasihaNo ratings yet
- Guangyu Mu and Xiaozhen MiDocument5 pagesGuangyu Mu and Xiaozhen MiAinul NasihaNo ratings yet
- Kedudukan Vvip N VipDocument1 pageKedudukan Vvip N VipAinul NasihaNo ratings yet
- Pengantar Teknik Kimia Sesi 1 Peralatan Proses: Ir. Abdul Wahid Surhim, MTDocument14 pagesPengantar Teknik Kimia Sesi 1 Peralatan Proses: Ir. Abdul Wahid Surhim, MTAinul NasihaNo ratings yet
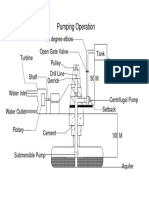
- Pumping Operation: Open Gate Valve 90 Degree Elbow Turbine Drill LineDocument1 pagePumping Operation: Open Gate Valve 90 Degree Elbow Turbine Drill LineAinul NasihaNo ratings yet
- Graph of Reciprocal of Precision Velocity Against Rotor VelocityDocument5 pagesGraph of Reciprocal of Precision Velocity Against Rotor VelocityAinul NasihaNo ratings yet
- Martin Spur GearsDocument39 pagesMartin Spur GearsrukahuaNo ratings yet
- To Metals & Alloys: Mariyam Jameelah Ghazali, Phd. 2015/201 6Document72 pagesTo Metals & Alloys: Mariyam Jameelah Ghazali, Phd. 2015/201 6Ainul NasihaNo ratings yet
- Project Proposal Form SampleDocument3 pagesProject Proposal Form SampleAinul NasihaNo ratings yet
- Cover CL 1224Document1 pageCover CL 1224Ainul NasihaNo ratings yet
- Art of Characterization in Pride and PrejudiceDocument2 pagesArt of Characterization in Pride and PrejudiceHafiz AhmedNo ratings yet
- Scientific Evidence For ReincarnationDocument2 pagesScientific Evidence For ReincarnationS.r. SarathNo ratings yet
- Example Lesson PlanDocument4 pagesExample Lesson Planapi-456873404No ratings yet
- Maclaurin Newton & HumeDocument18 pagesMaclaurin Newton & HumeOmar KassemNo ratings yet
- Transfield Shipping Inc of Panama V Mercator Shipping Inc of Monrovia PDFDocument39 pagesTransfield Shipping Inc of Panama V Mercator Shipping Inc of Monrovia PDFElizabeth HarewoodNo ratings yet
- Education For B. EdDocument71 pagesEducation For B. EdMr. Jakiush Ch MarakNo ratings yet
- Konark TempleDocument4 pagesKonark TemplemanjarysinghNo ratings yet
- Templates: - EssayDocument6 pagesTemplates: - EssaySharonrejiNo ratings yet
- On The Modeling of Snowflake Growth Using Hexagonal AutomataDocument25 pagesOn The Modeling of Snowflake Growth Using Hexagonal AutomataPedroNo ratings yet
- Exam Notes UptuDocument6 pagesExam Notes Uptuaparna_06khanna50% (2)
- Building Brand Image Through Event Sponsorship: The Role of Image TransferDocument12 pagesBuilding Brand Image Through Event Sponsorship: The Role of Image TransfersweelaNo ratings yet
- The Maharshi: AY With HagavanDocument7 pagesThe Maharshi: AY With HagavanAaditya ChowdaryNo ratings yet
- Enneagram Type 1 - The ReformerDocument2 pagesEnneagram Type 1 - The ReformerAndrew J. MoeNo ratings yet
- Promiscuous Women More Likely To Be Tolerated If They Are High EarnersDocument3 pagesPromiscuous Women More Likely To Be Tolerated If They Are High EarnersMonica FrazerNo ratings yet
- L1Document9 pagesL1AnnaGrigoryanNo ratings yet
- Engineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasDocument27 pagesEngineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasAbhishek AroraNo ratings yet
- Quality of Work Life A Study of Employees in Shanghai, China.Document18 pagesQuality of Work Life A Study of Employees in Shanghai, China.Emma PetrucaNo ratings yet
- Chakras and Your CareerDocument2 pagesChakras and Your CareerJessica Ross100% (1)
- Dynamics S Neil RasbandDocument142 pagesDynamics S Neil RasbandDavid MendezNo ratings yet
- Vyasadeva Jiva-Tattva or Vishnu-TattvaDocument7 pagesVyasadeva Jiva-Tattva or Vishnu-TattvaJohn BrownNo ratings yet
- Camarilla Status Packet - 2010Document17 pagesCamarilla Status Packet - 2010Lee Richard100% (1)
- Su16 Edld7431 Syllabus Stumpf 20160511Document11 pagesSu16 Edld7431 Syllabus Stumpf 20160511api-381991708No ratings yet
- Batterer Intervention StrategiesDocument143 pagesBatterer Intervention StrategiesMal Crowe100% (1)
- Integration of Public Policies On CSRDocument32 pagesIntegration of Public Policies On CSRJuly Lumantas70% (10)