You might also like
- International Baccalaureate (IB) Past Papers With Mark SchemesDocument128 pagesInternational Baccalaureate (IB) Past Papers With Mark SchemesFirasco24% (42)
- Oracle JDeveloper 10g Build Applications With ADF Instructor Guide - Volume 2 PDFDocument256 pagesOracle JDeveloper 10g Build Applications With ADF Instructor Guide - Volume 2 PDFjurgen1871No ratings yet
- Study of Emissions From Cell Towers On Temecula Valley Unified School District PropertyDocument18 pagesStudy of Emissions From Cell Towers On Temecula Valley Unified School District PropertyThe Press-Enterprise / pressenterprise.comNo ratings yet
- B Tech 6 Ce151019122826Document19 pagesB Tech 6 Ce151019122826srajan sonkesriyaNo ratings yet
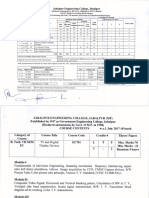
- Jabalpur Engineering College, Jabalpur: (AicteDocument22 pagesJabalpur Engineering College, Jabalpur: (AicteyvigkNo ratings yet
- Btech Ip 6th SemDocument11 pagesBtech Ip 6th SemSoumya SoniNo ratings yet
- EC 7th SEM AICTE111220010919Document19 pagesEC 7th SEM AICTE111220010919Shiv MahodayNo ratings yet
- CS 8th SEM AICTE121220115902Document17 pagesCS 8th SEM AICTE121220115902Abhishek MishraNo ratings yet
- EC 8th SEM AICTE121220115934Document15 pagesEC 8th SEM AICTE121220115934Shiv MahodayNo ratings yet
- CE 7th SEM AICTE111220010750Document16 pagesCE 7th SEM AICTE111220010750srajan sonkesriyaNo ratings yet
- SyllabusDocument15 pagesSyllabusgyarsilalsolanki011No ratings yet
- B.E.: Electronics & Communication Engineering: (Not For E&C Students)Document5 pagesB.E.: Electronics & Communication Engineering: (Not For E&C Students)mabhatNo ratings yet
- Csit Btech Iv Yr Vii Sem Scheme Syllabus July 2022Document25 pagesCsit Btech Iv Yr Vii Sem Scheme Syllabus July 2022Deepak DhakadNo ratings yet
- Me Ii Sem Microwave080319050723 PDFDocument10 pagesMe Ii Sem Microwave080319050723 PDFachin mponlineNo ratings yet
- Portions Covered-261122Document9 pagesPortions Covered-261122lakshmi cnNo ratings yet
- URR18 - CSE-Scheme& Syllabus For StudentsDocument55 pagesURR18 - CSE-Scheme& Syllabus For StudentsJ NuthanNo ratings yet
- 4 Sem SC Sy240822013845Document12 pages4 Sem SC Sy240822013845Aryan RaiNo ratings yet
- Ece Syllabus s7 Kannur UniversityDocument30 pagesEce Syllabus s7 Kannur UniversitygokulnrnnkNo ratings yet
- 6th Sem Electrical ICDocument28 pages6th Sem Electrical ICPintu DaleiNo ratings yet
- EN 4th Year Syllabus - 2021-22Document19 pagesEN 4th Year Syllabus - 2021-22Akshaj SinghNo ratings yet
- RGPV Scheme Cbgs Ec 6 SemDocument1 pageRGPV Scheme Cbgs Ec 6 SemAman Singh100% (1)
- Ipe Cbcs June 2016Document6 pagesIpe Cbcs June 2016Amaan KhanNo ratings yet
- B.Tech (CSE) 3rd Year G SchemeDocument56 pagesB.Tech (CSE) 3rd Year G Schemevader1534No ratings yet
- Substation Commissioning 1Document66 pagesSubstation Commissioning 1TejaRam Augusthya0% (1)
- Madhav Institute of Technology & Science, GwaliorDocument4 pagesMadhav Institute of Technology & Science, GwaliorVikas MahorNo ratings yet
- S 20 ECE SyllabusDocument188 pagesS 20 ECE Syllabus133No ratings yet
- Electrical Syllabus of V and VI Sem Board of Electrical EngineeringDocument27 pagesElectrical Syllabus of V and VI Sem Board of Electrical EngineeringMr GanpatNo ratings yet
- EE 8th SEM AICTE121220120010Document15 pagesEE 8th SEM AICTE121220120010Udita GuptaNo ratings yet
- ECE Syllabus II Year 2011-12Document21 pagesECE Syllabus II Year 2011-12vikNo ratings yet
- 4 - 09-14-2021 - 14-46-32 - B.Tech CSE 4th YearDocument53 pages4 - 09-14-2021 - 14-46-32 - B.Tech CSE 4th YearGOURAB PANDITNo ratings yet
- 202301241825589227EEE2020Document63 pages202301241825589227EEE2020Deepansh PandeyNo ratings yet
- EE 4th Year Syllabus - 2021-22Document19 pagesEE 4th Year Syllabus - 2021-22Prakhar KumarNo ratings yet
- B.Tech 2nd Yr CHDocument22 pagesB.Tech 2nd Yr CHRobinNo ratings yet
- SVUCE MTech ECE R2018 SyllabusDocument106 pagesSVUCE MTech ECE R2018 SyllabusRaja RamNo ratings yet
- CSE VIII Semester Scheme Syllabus 2Document21 pagesCSE VIII Semester Scheme Syllabus 2garima khasdeoNo ratings yet
- SEM VI 39 Electrical EngineeringDocument93 pagesSEM VI 39 Electrical EngineeringSURAJ KUMARNo ratings yet
- FM SyllabusDocument5 pagesFM Syllabusdeepraj gawandNo ratings yet
- Evaluation Scheme & Syllabus For B. Tech. Second Year (Electronics and Communication Engineering)Document41 pagesEvaluation Scheme & Syllabus For B. Tech. Second Year (Electronics and Communication Engineering)UMANG JAISWAL IET LucknowNo ratings yet
- Syllabi KnitDocument70 pagesSyllabi KnitRaj SinghNo ratings yet
- Btech EE 2015Document71 pagesBtech EE 2015Suyash NathNo ratings yet
- Shetkari Dakhla RequiredDocument7 pagesShetkari Dakhla Requiredrishi choudharyNo ratings yet
- Course Structure For M.Tech. Electrical Engineering (Power Systems) Semester I W. E. F. 2018-2019Document23 pagesCourse Structure For M.Tech. Electrical Engineering (Power Systems) Semester I W. E. F. 2018-2019Addy JhaNo ratings yet
- BTech. 4th Year - Computer Science and Engineering-Data Science - 2023-24Document20 pagesBTech. 4th Year - Computer Science and Engineering-Data Science - 2023-24therapidcodingNo ratings yet
- BCA - V and VI Sem 2021-2022 SchemaDocument19 pagesBCA - V and VI Sem 2021-2022 SchemaAniket Nsc0025No ratings yet
- Be Viii Sem Syllabus Ay 2019-2020 (CBCS)Document25 pagesBe Viii Sem Syllabus Ay 2019-2020 (CBCS)mrsreddyNo ratings yet
- Vi Sem Ce Uit Scheme21-22180321032509Document1 pageVi Sem Ce Uit Scheme21-22180321032509chutiyaNo ratings yet
- BTech CS 4th Year SyllabusDocument19 pagesBTech CS 4th Year SyllabusILMA UROOJNo ratings yet
- Scheme & Syllabus of UG Engineering ProgramDocument18 pagesScheme & Syllabus of UG Engineering ProgramAdarsh JiNo ratings yet
- BTech CS 4th Year SyllabusDocument19 pagesBTech CS 4th Year SyllabusRahul Kumar SInhaNo ratings yet
- CSE BTECH IV SEM SCHEME SYLLABUS - Jan 2022Document16 pagesCSE BTECH IV SEM SCHEME SYLLABUS - Jan 2022Aditya ChouhanNo ratings yet
- Scheme&Syllabus BTech 1st, 2nd Wef AY2022-23Document37 pagesScheme&Syllabus BTech 1st, 2nd Wef AY2022-23Sai RameshNo ratings yet
- M.Tech. in Mechanical Engineering WithDocument5 pagesM.Tech. in Mechanical Engineering WithvivekNo ratings yet
- Scheme and Syllabus FOR M. Tech. Degree Programme IN Civil Engineering With SpecializationDocument60 pagesScheme and Syllabus FOR M. Tech. Degree Programme IN Civil Engineering With SpecializationAdila AbdullakunjuNo ratings yet
- B Tech III Year CSE Syllabus 2020 21Document24 pagesB Tech III Year CSE Syllabus 2020 21rahulyadav957181No ratings yet
- 6 BT Ei PDFDocument99 pages6 BT Ei PDFramesh babuNo ratings yet
- MT8511 - PeDocument2 pagesMT8511 - PeScientist SakthivelNo ratings yet
- 7th Sem SyllabusDocument11 pages7th Sem SyllabusShobhit SinhaNo ratings yet
- B.Tech CSE 3rd YearDocument54 pagesB.Tech CSE 3rd YearJAIVINDERNo ratings yet
- 1 BT CeDocument122 pages1 BT CeSeharNo ratings yet
- Sem VI Electronics TelecommDocument40 pagesSem VI Electronics TelecommM.T. KadamNo ratings yet
- M. Tech Program in Electronics & Communication Engineering: (Wireless Technology)Document70 pagesM. Tech Program in Electronics & Communication Engineering: (Wireless Technology)Jerin VargheseNo ratings yet
- What Is Data Types in C Language ?: Datatype Specific The Size & Type of Values That Can Be Stored in An VariableDocument9 pagesWhat Is Data Types in C Language ?: Datatype Specific The Size & Type of Values That Can Be Stored in An VariableGovindramNo ratings yet
- VMware Hands-On Labs - HOL-1911-02-SDC - VCHA Lab PDFDocument166 pagesVMware Hands-On Labs - HOL-1911-02-SDC - VCHA Lab PDFvinoopnvNo ratings yet
- IEEE 802.20: See AlsoDocument2 pagesIEEE 802.20: See Alsomau_mmx5738No ratings yet
- Sri Venkateswara College of Engineering Course Delivery Plan - Lab Page 1 ofDocument3 pagesSri Venkateswara College of Engineering Course Delivery Plan - Lab Page 1 ofxperiaashNo ratings yet
- 02-Steps To Analyze AWR Report in OracleDocument8 pages02-Steps To Analyze AWR Report in OracleAnonymous 8RhRm6Eo7hNo ratings yet
- Wearable ComputerDocument9 pagesWearable Computerhowida nafaaNo ratings yet
- Minor Project Report Controlling Computer With Hand Gestures Using Arduino and PythonDocument27 pagesMinor Project Report Controlling Computer With Hand Gestures Using Arduino and Pythondexter100% (4)
- Fiori MM Test ScriptsDocument125 pagesFiori MM Test Scriptsabhi_ray22No ratings yet
- AE111-IT Application Tools in Business 2021Document20 pagesAE111-IT Application Tools in Business 2021PANELA, Jericho F.No ratings yet
- 5 Intro To NetworkingDocument35 pages5 Intro To NetworkingsumairNo ratings yet
- Rsync From QNAP To My Cloud HowToDocument8 pagesRsync From QNAP To My Cloud HowToConstantinos GardasNo ratings yet
- Enterprise Resource and Planning - ERPDocument20 pagesEnterprise Resource and Planning - ERPyogendra reddyNo ratings yet
- 16 Kundeninfo enDocument7 pages16 Kundeninfo enanil nsNo ratings yet
- Program No:01 Date:11-10-2022 Develop A HTML5 Document To Create A Registration Form As Shown BelowDocument13 pagesProgram No:01 Date:11-10-2022 Develop A HTML5 Document To Create A Registration Form As Shown BelowGagan K. MNo ratings yet
- Letter and ResumeDocument2 pagesLetter and ResumeNathan WingerNo ratings yet
- k2000 SimmDocument2 pagesk2000 SimmChema TimonNo ratings yet
- IPSecDocument25 pagesIPSecDinesh ParasharNo ratings yet
- DEVISER S7200 - ManualDocument326 pagesDEVISER S7200 - ManualNicolas Maldonado BenitezNo ratings yet
- HiPath Wireless Access Points Software V1R3.10504.0 Release Notes PDFDocument25 pagesHiPath Wireless Access Points Software V1R3.10504.0 Release Notes PDFrichardNo ratings yet
- Cmos 0 To 44 MHZ Single Chip 8-Bit Microntroller: DescriptionDocument20 pagesCmos 0 To 44 MHZ Single Chip 8-Bit Microntroller: DescriptionJoel Hauk HaukNo ratings yet
- The Forrester Wave™: Low-Code Development Platforms For AD&D Pros, Q4 2017Document21 pagesThe Forrester Wave™: Low-Code Development Platforms For AD&D Pros, Q4 2017Luis BarretoNo ratings yet
- 70-640 Test2k1Document163 pages70-640 Test2k1ozworld3No ratings yet
- Security: A WDL Seminar Report OnDocument8 pagesSecurity: A WDL Seminar Report OnPREET GADANo ratings yet
- PDF CycloneII DatasheetDocument110 pagesPDF CycloneII DatasheetSatvik HardatNo ratings yet
- 3.-Modulo IDNET S4100-0100 - SIMPLEXDocument14 pages3.-Modulo IDNET S4100-0100 - SIMPLEXEduardo Serrano AtiroNo ratings yet
- FD11 Controller: Standard SpecificationsDocument28 pagesFD11 Controller: Standard SpecificationsMaycon Santos da SilveiraNo ratings yet
- Pillars of EcommerceDocument8 pagesPillars of EcommerceShaik YusafNo ratings yet