You might also like
- Review Paper On Traffic Flow Simulation On PythonDocument7 pagesReview Paper On Traffic Flow Simulation On PythonManushya is LiveNo ratings yet
- Machine Learning-MothennaDocument25 pagesMachine Learning-MothennaharithNo ratings yet
- Ijsrd Implementation PaperDocument6 pagesIjsrd Implementation Paperchaary30No ratings yet
- The Impact of Weather Data On Traffic Flow Prediction ModelsDocument9 pagesThe Impact of Weather Data On Traffic Flow Prediction ModelsIAES IJAINo ratings yet
- Traffic Flow Forecasting Using Multivariate Time-Series Deep Learning and Distributed ComputingDocument7 pagesTraffic Flow Forecasting Using Multivariate Time-Series Deep Learning and Distributed ComputingBasketball Hight LightNo ratings yet
- Paper 8871Document6 pagesPaper 8871IJARSCT JournalNo ratings yet
- Applied Sciences: Predicting Freeway Travel Time Using Multiple-Source Heterogeneous Data IntegrationDocument17 pagesApplied Sciences: Predicting Freeway Travel Time Using Multiple-Source Heterogeneous Data IntegrationAbdullah NajjarNo ratings yet
- Exploring Spatial-Temporal Relations Via Deep Convolutional NeuralDocument10 pagesExploring Spatial-Temporal Relations Via Deep Convolutional Neuralhoang anhNo ratings yet
- Collective Traffic ForecastingDocument15 pagesCollective Traffic ForecastingnaufraghiNo ratings yet
- Predicting Fine-Grained Traffic Conditions ViaDocument13 pagesPredicting Fine-Grained Traffic Conditions ViahieuhuechchNo ratings yet
- Two-Stream Multi-Channel Convolutional Neural Network (TM-CNN) For Multi-Lane Traffic Speed Prediction Considering Traffic Volume ImpactDocument9 pagesTwo-Stream Multi-Channel Convolutional Neural Network (TM-CNN) For Multi-Lane Traffic Speed Prediction Considering Traffic Volume ImpactsparkshockNo ratings yet
- Traffic Prediction For Intelligent Transportation Systems Using Machine LearningDocument28 pagesTraffic Prediction For Intelligent Transportation Systems Using Machine LearningRohit RajNo ratings yet
- A Survey Paper On Traffic Prediction Using Machine LearningDocument7 pagesA Survey Paper On Traffic Prediction Using Machine LearningIJRASETPublicationsNo ratings yet
- Technologies 10 00005Document11 pagesTechnologies 10 00005chau.pm020902No ratings yet
- Passenger Flow Prediction in Bus Transportation System Using Deep LearningDocument24 pagesPassenger Flow Prediction in Bus Transportation System Using Deep LearningPUTRI SAVITRINo ratings yet
- Research On Traffic Situation Analysis For Urban Road Network Through Spatiotemporal Data Mining: A Case Study of Xi'an, ChinaDocument15 pagesResearch On Traffic Situation Analysis For Urban Road Network Through Spatiotemporal Data Mining: A Case Study of Xi'an, ChinaNiña Criselle PasiaNo ratings yet
- ManuscriptDocument20 pagesManuscriptsadaf.brsindiaNo ratings yet
- Mobile Traffic Prediction From Raw DataDocument6 pagesMobile Traffic Prediction From Raw DataJJ LópezNo ratings yet
- ANN Based Short-Term Traffic Flow Forecasting in Undivided Two Lane Highway Authors:, ,, &Document4 pagesANN Based Short-Term Traffic Flow Forecasting in Undivided Two Lane Highway Authors:, ,, &nav9eeeenNo ratings yet
- Smart Traffic Congestion Learning Model For Dynamic Emergency Vehicle Routing Using (DCN) Deep Cross Network PDFDocument4 pagesSmart Traffic Congestion Learning Model For Dynamic Emergency Vehicle Routing Using (DCN) Deep Cross Network PDFInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Tu 2021Document18 pagesTu 2021jjabrahamsNo ratings yet
- One Column IEEE Journal ArticleDocument10 pagesOne Column IEEE Journal ArticleKrishna GautamNo ratings yet
- BiLSTM LSTMDocument11 pagesBiLSTM LSTMRONY ARTURO BOCANGEL SALASNo ratings yet
- Efficient Model To Predict The Traffic Congestion Through Deep LearningDocument8 pagesEfficient Model To Predict The Traffic Congestion Through Deep LearningIJRASETPublicationsNo ratings yet
- Mobile Traffic Prediction From Raw Data Using LSTM Networks: Hoang Duy Trinh, Lorenza Giupponi, Paolo DiniDocument6 pagesMobile Traffic Prediction From Raw Data Using LSTM Networks: Hoang Duy Trinh, Lorenza Giupponi, Paolo DinirahmatNo ratings yet
- Transportation Research Part C: Quan Yuan, Zhihan Liu, Jinglin Li, Junming Zhang, Fangchun YangDocument14 pagesTransportation Research Part C: Quan Yuan, Zhihan Liu, Jinglin Li, Junming Zhang, Fangchun YangjoanaNo ratings yet
- A Novel Deep Recurrent Neural Network For Short-Term Travel Demand Forecasting Under On-Demand Ride ServicesDocument12 pagesA Novel Deep Recurrent Neural Network For Short-Term Travel Demand Forecasting Under On-Demand Ride ServicesIshrat JahanNo ratings yet
- Traffic Prediction Using MLDocument7 pagesTraffic Prediction Using MLRavi Shankar0% (1)
- An Intelligent Model For Urban Demand-Responsive Transport System ControlDocument11 pagesAn Intelligent Model For Urban Demand-Responsive Transport System ControlFiuttenNo ratings yet
- A Fastest Route Planning For LBS Based On TrafficDocument7 pagesA Fastest Route Planning For LBS Based On TrafficNajim M HashimNo ratings yet
- AIMES Report - Melbourne Traffic Prediction - Urban PeakHourDocument23 pagesAIMES Report - Melbourne Traffic Prediction - Urban PeakHourJames Henry SmithNo ratings yet
- A Deep Learning Approach For Traffic Incident Detection in Urban NetworksDocument6 pagesA Deep Learning Approach For Traffic Incident Detection in Urban Networksmurari kumarNo ratings yet
- Sensors: Short-Term Traffic State Prediction Based On The Spatiotemporal Features of Critical Road SectionsDocument26 pagesSensors: Short-Term Traffic State Prediction Based On The Spatiotemporal Features of Critical Road SectionsTamal ChakrabortyNo ratings yet
- Deep Learning For Traffic Congestion Detection: A Survey PaperDocument5 pagesDeep Learning For Traffic Congestion Detection: A Survey PaperInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Fastest Route Planning For LBS Based On Traffic PredictionDocument6 pagesA Fastest Route Planning For LBS Based On Traffic Predictionaku_bdgNo ratings yet
- Improving The Performance of Single-Intersection Urban Traffic Networks Based On A Model Predictive ControllerDocument16 pagesImproving The Performance of Single-Intersection Urban Traffic Networks Based On A Model Predictive ControllerRamprasath JayabalanNo ratings yet
- Short-Term Traffic Prediction For Edge Computing-Enhanced Autonomous and Connected CarsDocument14 pagesShort-Term Traffic Prediction For Edge Computing-Enhanced Autonomous and Connected CarsTanay KhandelwalNo ratings yet
- Data Driven Congestion Trends Prediction of Urban TransportationDocument11 pagesData Driven Congestion Trends Prediction of Urban Transportationdan_intel6735No ratings yet
- Fuzzy Logic Model For The Prediction of Traffic Volume in Week DaysDocument6 pagesFuzzy Logic Model For The Prediction of Traffic Volume in Week Daysarjun_karun92No ratings yet
- Lu 2019 LeveragingGraphNeuralNetworkwithLSTMForTrafDocument9 pagesLu 2019 LeveragingGraphNeuralNetworkwithLSTMForTrafBinuri Yeshani RaigamkoraleNo ratings yet
- 1 s2.0 S0968090X2100437X MainDocument23 pages1 s2.0 S0968090X2100437X MainAymanNo ratings yet
- Website Traffic Forecasting Using Deep LearningDocument7 pagesWebsite Traffic Forecasting Using Deep LearningIJRASETPublicationsNo ratings yet
- Intelligent Traffic Monitoring System PDFDocument11 pagesIntelligent Traffic Monitoring System PDFMary BakhoumNo ratings yet
- TripVista - Triple Perspective Visual Trajectory Analytics and Its Application On Microscopic Traffic Data at A Road IntersectionDocument8 pagesTripVista - Triple Perspective Visual Trajectory Analytics and Its Application On Microscopic Traffic Data at A Road IntersectionJim C. ValenciaNo ratings yet
- A Scalable Big Data Framework For Real-Time Tra C Monitoring SystemDocument17 pagesA Scalable Big Data Framework For Real-Time Tra C Monitoring SystemMeghana K SNo ratings yet
- A Graph-Temporal Urban Rail Fused Deep Learning MethodDocument30 pagesA Graph-Temporal Urban Rail Fused Deep Learning MethoddonoglueNo ratings yet
- Systematic ReviewDocument24 pagesSystematic ReviewMOHAMMAD ABU KHALIFANo ratings yet
- Smart Intersection Design For Traffic Pedestrian ADocument7 pagesSmart Intersection Design For Traffic Pedestrian AVi'ren BoharaNo ratings yet
- Traffice Collision AvoidenceDocument10 pagesTraffice Collision AvoidenceHarikesh MauryaNo ratings yet
- Spatio-Temporal Graph Convolutional Networks for Traffic ForecastingDocument7 pagesSpatio-Temporal Graph Convolutional Networks for Traffic ForecastingRod MarchNo ratings yet
- Dynamic Road Traffic ManagementDocument5 pagesDynamic Road Traffic ManagementBhargava GantiNo ratings yet
- Evaluation of The Accuracy and Automation of Travel Time and Delay Data Collection MethodsDocument12 pagesEvaluation of The Accuracy and Automation of Travel Time and Delay Data Collection MethodsVicces P. EstradaNo ratings yet
- Research Article: Travel Time Reliability For Urban Networks: Modelling and EmpiricsDocument14 pagesResearch Article: Travel Time Reliability For Urban Networks: Modelling and EmpiricsVishalBeheraNo ratings yet
- Smart Card Data-Centric Replication of The Multi-Modal Public Transport System in Singapore / Journal of Transport Geography Liu, 2018Document11 pagesSmart Card Data-Centric Replication of The Multi-Modal Public Transport System in Singapore / Journal of Transport Geography Liu, 2018saipraveen03No ratings yet
- TrafficDocument39 pagesTrafficCreate IInnocateNo ratings yet
- Coordinated Traffic Signal System Adaptive For Vehicle Density Technical PaperDocument9 pagesCoordinated Traffic Signal System Adaptive For Vehicle Density Technical PaperPasinduNo ratings yet
- RL Paper Latex v01d01Document6 pagesRL Paper Latex v01d01Anirudh RangarajanNo ratings yet
- Applied Sciences: Deep Learning System For Vehicular Re-Routing and Congestion AvoidanceDocument14 pagesApplied Sciences: Deep Learning System For Vehicular Re-Routing and Congestion AvoidanceJuan VillacísNo ratings yet
- Road Traffic Prediction Using Bayesian Networks: Poo Kuan Hoong, Ian K. T. Tan, Ong Kok Chien, Choo-Yee TingDocument5 pagesRoad Traffic Prediction Using Bayesian Networks: Poo Kuan Hoong, Ian K. T. Tan, Ong Kok Chien, Choo-Yee TingsidxxxnitcNo ratings yet
- Data-Driven Traffic Engineering: Understanding of Traffic and Applications Based on Three-Phase Traffic TheoryFrom EverandData-Driven Traffic Engineering: Understanding of Traffic and Applications Based on Three-Phase Traffic TheoryNo ratings yet
- Certificate Presentator-2Document1 pageCertificate Presentator-2subh.goswami6537No ratings yet
- Certificate of Participation-76Document1 pageCertificate of Participation-76subh.goswami6537No ratings yet
- Car InsuranceDocument4 pagesCar Insurancesubh.goswami6537No ratings yet
- Data Visualization A Problem Solving TechniquesDocument8 pagesData Visualization A Problem Solving Techniquessubh.goswami6537No ratings yet
- Seminar 6 PDFDocument54 pagesSeminar 6 PDFsubh.goswami6537No ratings yet
- Psa Activity and Questions Sheet: Step 1: Thinking About PsasDocument2 pagesPsa Activity and Questions Sheet: Step 1: Thinking About PsasanibeliNo ratings yet
- Identifying Market TrendsDocument7 pagesIdentifying Market TrendssritraderNo ratings yet
- Corporate, Business Unit & Functional Level StrategiesDocument1 pageCorporate, Business Unit & Functional Level StrategieslightknowNo ratings yet
- What is Curriculum EvaluationDocument55 pagesWhat is Curriculum EvaluationRobert S. Deligero50% (2)
- Effect of School's Physical Facilities On Learning and Outcomes of Students in NepalDocument14 pagesEffect of School's Physical Facilities On Learning and Outcomes of Students in NepalGom-o Eugenio JrNo ratings yet
- Beta Testing SlidesDocument14 pagesBeta Testing SlidesNeoNo ratings yet
- Application Letter PT Scci - Salman RamdhaniDocument1 pageApplication Letter PT Scci - Salman RamdhaniRamadhani SalmanNo ratings yet
- Exam Reviewer Special SubsDocument6 pagesExam Reviewer Special Subsjana whiteNo ratings yet
- Internship Log Book 2014 Department Arch-ArcDocument21 pagesInternship Log Book 2014 Department Arch-Arcreileenmitz11No ratings yet
- Car Thesis StatementDocument7 pagesCar Thesis Statementkimberlyjonesnaperville100% (2)
- Alternate Dispute ResolutionDocument12 pagesAlternate Dispute ResolutionsahilkaushikNo ratings yet
- CHINA POPULATION TREND 1950-1995Document9 pagesCHINA POPULATION TREND 1950-1995Alex Borowski100% (1)
- Job Satisfaction and Attitudes of PharmacistsDocument41 pagesJob Satisfaction and Attitudes of PharmacistsNamoAmitofou100% (1)
- Lachs Moot Court Problem 2020 Valenkova V SaRidia PDFDocument6 pagesLachs Moot Court Problem 2020 Valenkova V SaRidia PDFAnmol DhawanNo ratings yet
- Marketing Management 2 OutlineDocument9 pagesMarketing Management 2 OutlineMehak AggarwalNo ratings yet
- Lecture 2 - Locating and Reviewing Literature-BMSDocument40 pagesLecture 2 - Locating and Reviewing Literature-BMSconnaissance.amyNo ratings yet
- Quiz 4 (Pass - Quizchapter4) (Page 1 of 2)Document1 pageQuiz 4 (Pass - Quizchapter4) (Page 1 of 2)co caNo ratings yet
- Burn Rate vs. Earned ValueDocument1 pageBurn Rate vs. Earned Valueyamanta_rajNo ratings yet
- Biomedical EngineeringDocument12 pagesBiomedical EngineeringBiomedical Engineering100% (1)
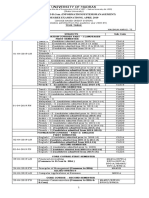
- University of Madras BSc ISM BCom ISM degree exams timetable April 2019Document14 pagesUniversity of Madras BSc ISM BCom ISM degree exams timetable April 2019RoshniNo ratings yet
- Assignment PDFDocument3 pagesAssignment PDFshruthinNo ratings yet
- EPSY 578 Syllabus - Fa 20 v2Document6 pagesEPSY 578 Syllabus - Fa 20 v2furkann91No ratings yet
- Social media strategies for introducing ecotourism concepts to studentsDocument6 pagesSocial media strategies for introducing ecotourism concepts to studentsAlifanDimasNo ratings yet
- Peritonitis GuiaDocument28 pagesPeritonitis GuiaAndrea ClaudieNo ratings yet
- Journal of Primary Education: Zakiyah Ismuwardani, Agus Nuryatin & Mukh DoyinDocument8 pagesJournal of Primary Education: Zakiyah Ismuwardani, Agus Nuryatin & Mukh DoyinMusisiNo ratings yet
- Presentation SampleDocument28 pagesPresentation SampleShahanna GarciaNo ratings yet
- Hwayeol and Daechun PDFDocument13 pagesHwayeol and Daechun PDFmandymeiyiNo ratings yet
- Enhancing Warisan Condo SecurityDocument6 pagesEnhancing Warisan Condo Securityjothi subra0% (1)
- Statistics: It'S Your TurnDocument7 pagesStatistics: It'S Your TurnMarjie Bay-asenNo ratings yet
- Dissertation Analysis of Data ExamplesDocument5 pagesDissertation Analysis of Data Exampleshoffklawokor1974100% (1)