You might also like
- Setup Manual 0if-Plus B-64647en - 01 - 01Document400 pagesSetup Manual 0if-Plus B-64647en - 01 - 01Aloisio Gonzaga100% (1)
- Entrepreneurship & New Venture Management 6e - Chapter 1Document19 pagesEntrepreneurship & New Venture Management 6e - Chapter 1Hlulani Decision50% (2)
- AI Question BankDocument18 pagesAI Question Bankmusic12341234No ratings yet
- Malware Analysis Project ClusteringDocument11 pagesMalware Analysis Project ClusteringGilian kipkosgeiNo ratings yet
- 1978 Damage - To Rock Tunnels From Earthquake ShakingDocument18 pages1978 Damage - To Rock Tunnels From Earthquake Shakingofelix505100% (1)
- DS MAY 19 SOLVEDDocument24 pagesDS MAY 19 SOLVEDcrazygamernikhil922No ratings yet
- Divide-and-Conquer ParadigmDocument14 pagesDivide-and-Conquer ParadigmBEKAN FAYERANo ratings yet
- Asymptotic Analysis (Big-O Notation) : Big O Notation Is Used in Computer Science To Describe The PerformanceDocument10 pagesAsymptotic Analysis (Big-O Notation) : Big O Notation Is Used in Computer Science To Describe The PerformanceNavleen KaurNo ratings yet
- DSA Important InstructionsDocument11 pagesDSA Important InstructionsKimi JohnNo ratings yet
- Ai Notes - 15-21Document7 pagesAi Notes - 15-21Assoc.Prof, CSE , Vel Tech, ChennaiNo ratings yet
- Big Data Optimization TechniquesDocument17 pagesBig Data Optimization Techniqueskrishnasai tadiboinaNo ratings yet
- Algorithm Design Techniques ExplainedDocument66 pagesAlgorithm Design Techniques ExplainedBryce NanaNo ratings yet
- Computational Thinking NotesDocument49 pagesComputational Thinking NotesCarl MhongweiNo ratings yet
- Design and Analysis of Algorithms Laboratory (15Csl47)Document12 pagesDesign and Analysis of Algorithms Laboratory (15Csl47)Raj vamsi Srigakulam100% (1)
- Data Structures NotesDocument40 pagesData Structures NotesHirensKodnaniNo ratings yet
- Daa Lab Manual Kcs553 2022-23Document89 pagesDaa Lab Manual Kcs553 2022-232030195No ratings yet
- DSA Practical FinalDocument35 pagesDSA Practical FinalRiya GunjalNo ratings yet
- Unit 1Document17 pagesUnit 1ArsalanNo ratings yet
- DATA Struct NotesDocument65 pagesDATA Struct NotesVaruna NikamNo ratings yet
- Reducing Lookup Table Size Used For Bit-Counting AlgorithmDocument8 pagesReducing Lookup Table Size Used For Bit-Counting AlgorithmOsvaldo NavarroNo ratings yet
- DAA NOTES: DATA, ALGORITHMS, GREEDY METHODSDocument9 pagesDAA NOTES: DATA, ALGORITHMS, GREEDY METHODSswatiNo ratings yet
- Daa Q&aDocument8 pagesDaa Q&aAryan PrasadNo ratings yet
- ADA SolvedDocument14 pagesADA Solvedganashreep2003No ratings yet
- DATA STRUCTURE NotesDocument101 pagesDATA STRUCTURE Notesrockmeena127No ratings yet
- 20MCA023 Algorithm AssighnmentDocument13 pages20MCA023 Algorithm AssighnmentPratik KakaniNo ratings yet
- Main PPT LessonDocument85 pagesMain PPT Lessonx 4 dNo ratings yet
- Unit1 DaaDocument21 pagesUnit1 DaaArunachalam SelvaNo ratings yet
- Daa Unit-2Document53 pagesDaa Unit-2pihadar269No ratings yet
- Data Structure Module 1Document10 pagesData Structure Module 1ssreeram1312.tempNo ratings yet
- AlgorithmsDocument8 pagesAlgorithmstasnimnuzhat5000No ratings yet
- New Approach For Solving Fuzzy Triangular Assignment by Row Minima MethodDocument9 pagesNew Approach For Solving Fuzzy Triangular Assignment by Row Minima MethodIAEME PublicationNo ratings yet
- DSA Students Reference NotesDocument96 pagesDSA Students Reference NotesAbdul Azeez 312No ratings yet
- 2-1 CAI Unit II Q & ADocument6 pages2-1 CAI Unit II Q & Aluciferk0405No ratings yet
- Dsa NotesDocument98 pagesDsa NotesVarsha yadavNo ratings yet
- Daa Lab FileDocument36 pagesDaa Lab Fileshriyaagupta18No ratings yet
- Daa SDocument6 pagesDaa Skolasandeep555No ratings yet
- Lab FileDocument29 pagesLab FileHarshita MeenaNo ratings yet
- Unit - IiDocument46 pagesUnit - IiJit AggNo ratings yet
- Dsoop Qu AnsDocument33 pagesDsoop Qu AnsKarthi Keyan VeeraNo ratings yet
- Abstract Data StructureDocument18 pagesAbstract Data StructureVedant PatilNo ratings yet
- Binary search time complexity O(log n) when element is lastDocument5 pagesBinary search time complexity O(log n) when element is lastSAKTHI SANTHOSH BNo ratings yet
- Daa C2Document13 pagesDaa C2amanterefe99No ratings yet
- DAA Assignment 1Document7 pagesDAA Assignment 1MIKHAIEL gamingNo ratings yet
- Data Structures and Algorithms (DSA) ConceptsDocument11 pagesData Structures and Algorithms (DSA) ConceptsAyaan LandgeNo ratings yet
- Implementation and Performance Analysis of Exponential Tree SortingDocument5 pagesImplementation and Performance Analysis of Exponential Tree SortingLalit SharmaNo ratings yet
- AA Final-Hand NotsDocument18 pagesAA Final-Hand NotsBEKAN FAYERANo ratings yet
- Unit 7 Decrease and Conquer: StructureDocument22 pagesUnit 7 Decrease and Conquer: StructureRaj SinghNo ratings yet
- Chapter Two: Problem Solving ParadigmsDocument33 pagesChapter Two: Problem Solving Paradigmskefiyalew kuntaNo ratings yet
- Algorthim Important QuestionsDocument9 pagesAlgorthim Important Questionsganesh moorthiNo ratings yet
- Algorithm Analysis and Designing LectureDocument86 pagesAlgorithm Analysis and Designing LectureHikmatullah SaqibNo ratings yet
- Foca FileDocument16 pagesFoca FileShaweta ThakurNo ratings yet
- Introduction To Data StructuresDocument52 pagesIntroduction To Data StructuresArpita Banerjee BhattacharyaNo ratings yet
- PPT Lecture 2.2.1 (3)Document18 pagesPPT Lecture 2.2.1 (3)deadlygamer6996No ratings yet
- Math ConceptsDocument4 pagesMath ConceptscolchaodoquartoNo ratings yet
- 6th Sem Algorithm (c-14) AnswerDocument15 pages6th Sem Algorithm (c-14) Answerrituprajna2004No ratings yet
- Chapter 3Document81 pagesChapter 3Aditya PandeyNo ratings yet
- Unit1 IntroductionDocument21 pagesUnit1 Introduction321126510L03 kurmapu dharaneeswarNo ratings yet
- Data Structures Module 1 QB Complete SolutionsDocument39 pagesData Structures Module 1 QB Complete SolutionsRamu SitaNo ratings yet
- WorkShop On PLO Exit ExamDocument88 pagesWorkShop On PLO Exit ExamMohammad HaseebuddinNo ratings yet
- Introduction to algorithms and analysisDocument17 pagesIntroduction to algorithms and analysisajNo ratings yet
- Fundamentals of Computing AlgorithmsDocument60 pagesFundamentals of Computing Algorithmsreagan oloyaNo ratings yet
- 253 PDFDocument52 pages253 PDFsk15021993No ratings yet
- Amie Iii Min I Sem Q.bank 2016-17Document36 pagesAmie Iii Min I Sem Q.bank 2016-17JamesNo ratings yet
- CamScanner Scans PDF DocsDocument6 pagesCamScanner Scans PDF DocsJamesNo ratings yet
- Bidders GuideDocument33 pagesBidders GuideJamesNo ratings yet
- Employee Provident Fund Electronic Challan Cum Return (ECRDocument3 pagesEmployee Provident Fund Electronic Challan Cum Return (ECRJamesNo ratings yet
- S ANTONY TENDER PRICE SCHEDULEDocument1 pageS ANTONY TENDER PRICE SCHEDULEJamesNo ratings yet
- Cbcs-Computerscience-2018 220622 192641Document187 pagesCbcs-Computerscience-2018 220622 192641JamesNo ratings yet
- PSC FormDocument1 pagePSC FormJamesNo ratings yet
- Java Complete BookDocument84 pagesJava Complete BookJamesNo ratings yet
- Summer 2021 Exm VenueDocument13 pagesSummer 2021 Exm VenueJamesNo ratings yet
- 3.1 Notice Inviting Nomination ECM Election 2021-2023 - RevisedDocument1 page3.1 Notice Inviting Nomination ECM Election 2021-2023 - RevisedJamesNo ratings yet
- NLC INDIA BMC TENDERDocument92 pagesNLC INDIA BMC TENDERJamesNo ratings yet
- Zodax Collection 2011Document129 pagesZodax Collection 2011njlaporteNo ratings yet
- Consumer Behaviour 1Document11 pagesConsumer Behaviour 1Rushika ShahNo ratings yet
- Radiant Heating and Cooling SystemDocument8 pagesRadiant Heating and Cooling SystemLaurentiuNo ratings yet
- Bangladesh Labour Rights ResearchDocument29 pagesBangladesh Labour Rights ResearchMd. Hasan Ali JoyNo ratings yet
- This Study Resource WasDocument6 pagesThis Study Resource WasRian RorresNo ratings yet
- Special Power of Attorney for Overseas EmploymentDocument2 pagesSpecial Power of Attorney for Overseas EmploymentJakeLeonciniNo ratings yet
- Inglés C2 Corrector Septiembre 2021Document11 pagesInglés C2 Corrector Septiembre 2021CRISTINA MARTINEZ SANCHEZNo ratings yet
- Working Capital Management OF: Submitted by Priya BanerjeeDocument102 pagesWorking Capital Management OF: Submitted by Priya BanerjeeSushmita BarlaNo ratings yet
- RTC Order Granting Motion for Execution in Ejectment Case Despite Pending AppealDocument5 pagesRTC Order Granting Motion for Execution in Ejectment Case Despite Pending AppealAmmie AsturiasNo ratings yet
- How To Combine Cells Into A Cell With Comma, Space and Vice VersaDocument8 pagesHow To Combine Cells Into A Cell With Comma, Space and Vice VersaClifford Marco ArimadoNo ratings yet
- Ryanair Strategic AnalysisDocument36 pagesRyanair Strategic AnalysisAlmas Uddin100% (1)
- Hotel Reservation System: Hotel OAK-RAY, KandyDocument22 pagesHotel Reservation System: Hotel OAK-RAY, KandysaminaNo ratings yet
- Measuring The Sustainability of Urban Water ServicesDocument10 pagesMeasuring The Sustainability of Urban Water ServicesWalter RodríguezNo ratings yet
- Module 4 - Nursing Process and Administration-PharmaDocument13 pagesModule 4 - Nursing Process and Administration-PharmaKelsey MacaraigNo ratings yet
- 11608-Driving Women Fiction and PDFDocument240 pages11608-Driving Women Fiction and PDFAleksi KnuutilaNo ratings yet
- RFPDocument88 pagesRFPJayaram Peggem P0% (1)
- Mitchell Board of Education June 26 Meeting AgendaDocument33 pagesMitchell Board of Education June 26 Meeting AgendainforumdocsNo ratings yet
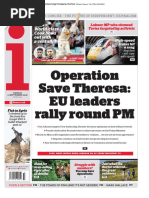
- The I NewspaperDocument60 pagesThe I Newspaperfagner barretoNo ratings yet
- Fasttrack - The Supply Chain Magazine (Apr-Jun 2009)Document5 pagesFasttrack - The Supply Chain Magazine (Apr-Jun 2009)SaheemNo ratings yet
- Digital Transducers: Group 3Document76 pagesDigital Transducers: Group 3Jasmine RaiNo ratings yet
- Green Economy in The Transport SectorDocument138 pagesGreen Economy in The Transport Sectorclayton MaramwidzeNo ratings yet
- Optical Burst Switching (OBS)Document27 pagesOptical Burst Switching (OBS)adityaNo ratings yet
- Quiz II - Company MissionDocument4 pagesQuiz II - Company MissionSuraj SapkotaNo ratings yet
- Cambridge IGCSE: PHYSICS 0625/62Document12 pagesCambridge IGCSE: PHYSICS 0625/62yuNo ratings yet
- Media Palnning ProcessDocument3 pagesMedia Palnning ProcessSrinivas KumarNo ratings yet
- Dynamic Arc Recognition and TerminationDocument12 pagesDynamic Arc Recognition and TerminationArun BabuNo ratings yet