You might also like
- BeagleBone Black Interfacing Hardware and Software - Yury MagdaDocument226 pagesBeagleBone Black Interfacing Hardware and Software - Yury MagdaAbdul Basit100% (5)
- STM32 IoT Projects For Beginner - Aharen SanDocument214 pagesSTM32 IoT Projects For Beginner - Aharen SanGerry Dela CruzNo ratings yet
- Lab 1 Introduction To Stm32F103 and Ide: St-Link V2 and Keil Uvision5Document33 pagesLab 1 Introduction To Stm32F103 and Ide: St-Link V2 and Keil Uvision5Kiều NguyễnNo ratings yet
- TMS320F28335 PDFDocument199 pagesTMS320F28335 PDFmariachi1980No ratings yet
- IcetranAutonomous Car Driving One Possible Implementation Using Machine Learning AlgorithmDocument7 pagesIcetranAutonomous Car Driving One Possible Implementation Using Machine Learning AlgorithmSaif HaqueNo ratings yet
- Design & Implementation of Real Time Autonomous Car by Using Image Processing & IoTDocument7 pagesDesign & Implementation of Real Time Autonomous Car by Using Image Processing & IoTTv BraviaNo ratings yet
- Iot Format WordDocument13 pagesIot Format WordNikhil SnNo ratings yet
- Smart parking system using IoTDocument7 pagesSmart parking system using IoTsas ekoNo ratings yet
- Self Driving Car Using Raspberry Pi: Keywords:Raspberry Pi, Lane Detection, Obstacle Detection, Opencv, Deep LearningDocument8 pagesSelf Driving Car Using Raspberry Pi: Keywords:Raspberry Pi, Lane Detection, Obstacle Detection, Opencv, Deep LearningKrishna KrishNo ratings yet
- Ijet V3i4p6Document6 pagesIjet V3i4p6International Journal of Engineering and TechniquesNo ratings yet
- SSRN Id3566915Document4 pagesSSRN Id3566915B452 AKSHAY SHUKLANo ratings yet
- Data-Driven Automatic Parking Constrained ControlDocument13 pagesData-Driven Automatic Parking Constrained ControlEhab Atari Abu-ZeidNo ratings yet
- Ijet V4i3p31 PDFDocument5 pagesIjet V4i3p31 PDFInternational Journal of Engineering and TechniquesNo ratings yet
- JournalNX - Vehicle Detection Haar CascadeDocument2 pagesJournalNX - Vehicle Detection Haar CascadeJournalNX - a Multidisciplinary Peer Reviewed Journal100% (1)
- LKL Degree ProjectDocument16 pagesLKL Degree ProjectKòóň LīńɡNo ratings yet
- Ravi Kumar 2021 IOP Conf. Ser. Mater. Sci. Eng. 1074 012012Document10 pagesRavi Kumar 2021 IOP Conf. Ser. Mater. Sci. Eng. 1074 012012Gaurav GhandatNo ratings yet
- Advanced Self Driving Car Using Machine LearningDocument5 pagesAdvanced Self Driving Car Using Machine LearningAJAST JournalNo ratings yet
- ET203 Research Paper PDFDocument5 pagesET203 Research Paper PDFYash SonawaneNo ratings yet
- A Novel Deep Learning Based ANPR Pipeline For Vehicle Access ControlDocument15 pagesA Novel Deep Learning Based ANPR Pipeline For Vehicle Access ControlAbhishek Parochi Engineer thisNo ratings yet
- An Analysis of Various Deep Learning Algorithms For Image ProcessingDocument6 pagesAn Analysis of Various Deep Learning Algorithms For Image ProcessingVIVA-TECH IJRINo ratings yet
- Tits 2020 2980855Document15 pagesTits 2020 2980855rahul rNo ratings yet
- Complete Panoptic Traffic Recognition System With Ensemble of YOLO Family ModelsDocument9 pagesComplete Panoptic Traffic Recognition System With Ensemble of YOLO Family ModelsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Integration of Opencv Raspberry Pi 3b+ and Camerasensor in Access Control of Vehicle Ignition KeysystemDocument11 pagesIntegration of Opencv Raspberry Pi 3b+ and Camerasensor in Access Control of Vehicle Ignition KeysystemImelda Uli Vistalina SimanjuntakNo ratings yet
- Vehicles Detection and Counting Based On Internet of Things Technology and Video Processing TechniquesDocument9 pagesVehicles Detection and Counting Based On Internet of Things Technology and Video Processing TechniquesIAES IJAINo ratings yet
- Kode Password Database 2019Document10 pagesKode Password Database 2019Newbie BienewNo ratings yet
- Vehicle Detection, Tracking and Counting For Traffic Surveillance Using Digital Image ProcessingDocument8 pagesVehicle Detection, Tracking and Counting For Traffic Surveillance Using Digital Image ProcessingIJRASETPublicationsNo ratings yet
- AI-Powered Smart Camera System for Automobile SafetyDocument31 pagesAI-Powered Smart Camera System for Automobile SafetySahil SinghNo ratings yet
- A Novel Deep Learning Based ANPR Pipeline For Vehicle Access ControlDocument15 pagesA Novel Deep Learning Based ANPR Pipeline For Vehicle Access ControlramykhalilNo ratings yet
- AbhiDocument20 pagesAbhipython6miniNo ratings yet
- A Review of Vehicle Detection Techniques For Intelligent VehiclesDocument21 pagesA Review of Vehicle Detection Techniques For Intelligent VehiclesAmartya RoyNo ratings yet
- Traffic Prediction For Intelligent Transportation System Using Machine LearningDocument4 pagesTraffic Prediction For Intelligent Transportation System Using Machine Learningkhedlekar shrutiNo ratings yet
- Applied Sciences: Applications of Computer Vision in Automation and RoboticsDocument3 pagesApplied Sciences: Applications of Computer Vision in Automation and RoboticsNourhan FathyNo ratings yet
- Proximity Based Automatic Data Annotation For Autonomous DrivingDocument10 pagesProximity Based Automatic Data Annotation For Autonomous DrivingHaripriya PalemNo ratings yet
- A Review Paper On Artificial Neural Network: Intelligent Traffic Management SystemDocument7 pagesA Review Paper On Artificial Neural Network: Intelligent Traffic Management SystemNIET Journal of Engineering & Technology(NIETJET)100% (1)
- CNN-Based Self-Driving Car ModelDocument8 pagesCNN-Based Self-Driving Car ModelMOHAMMED ZAINNo ratings yet
- Traffic Prediction For Intelligent Transportation System Using Machine LearningDocument5 pagesTraffic Prediction For Intelligent Transportation System Using Machine LearningRohit RajNo ratings yet
- Self-Driving Cars Using Genetic AlgorithmDocument6 pagesSelf-Driving Cars Using Genetic AlgorithmIJRASETPublicationsNo ratings yet
- Real-Time Detection of Vehicles Using The Haar-Like Features and Artificial Neuron NetworksDocument8 pagesReal-Time Detection of Vehicles Using The Haar-Like Features and Artificial Neuron NetworksAnonymous roFhLslwIFNo ratings yet
- A Survey of Technical Trends of ADAS and Autonomous DrivingDocument4 pagesA Survey of Technical Trends of ADAS and Autonomous DrivingFang YuanNo ratings yet
- Traffic Light Detection and Recognition For Self Driving Cars Using Deep Learning SurveyDocument4 pagesTraffic Light Detection and Recognition For Self Driving Cars Using Deep Learning SurveyEditor IJTSRDNo ratings yet
- Article 1Document9 pagesArticle 1sandhyasbfcNo ratings yet
- 23621-Article Text-35768-1-10-20200613Document8 pages23621-Article Text-35768-1-10-20200613Samuel HamiltonNo ratings yet
- Speed, Direction, Color and Type Identification of NHAI Expansions Using Deep LearningDocument7 pagesSpeed, Direction, Color and Type Identification of NHAI Expansions Using Deep LearningIJRASETPublicationsNo ratings yet
- Image Processing Application For Vehicle Seat Vacancy IdentificationDocument5 pagesImage Processing Application For Vehicle Seat Vacancy IdentificationEditor IJTSRDNo ratings yet
- Background Information: 2.1 Video ProcessingDocument4 pagesBackground Information: 2.1 Video ProcessingSanika DivekarNo ratings yet
- Classification and Counting of Vehicle Using Image Processing TechniquesDocument10 pagesClassification and Counting of Vehicle Using Image Processing TechniquesIJRASETPublicationsNo ratings yet
- Deep Learning Autonomous VehicleDocument11 pagesDeep Learning Autonomous VehicleSalman MNo ratings yet
- An Adaptive Motion Planning Algorithm For Obstacle Avoidance in Autonomous Vehicle ParkingDocument11 pagesAn Adaptive Motion Planning Algorithm For Obstacle Avoidance in Autonomous Vehicle ParkingIAES IJAINo ratings yet
- Development of A Dynamic Intelligent Recognition System For A Real-Time Tracking RobotDocument9 pagesDevelopment of A Dynamic Intelligent Recognition System For A Real-Time Tracking RobotIAES International Journal of Robotics and AutomationNo ratings yet
- Design of Lane Keeping Algorithm of Autonomous Vehicle PDFDocument9 pagesDesign of Lane Keeping Algorithm of Autonomous Vehicle PDFkhbvNo ratings yet
- Application of Image Processing Techniques For Autonomous CarsDocument12 pagesApplication of Image Processing Techniques For Autonomous CarsludwigNo ratings yet
- Visaul Big Data Analytics For Traffic Monitoring in Smart CityDocument6 pagesVisaul Big Data Analytics For Traffic Monitoring in Smart Cityjayraj daveNo ratings yet
- Department of Computer Science and Engineering: Project Phase - I Title Finalization SeminarDocument13 pagesDepartment of Computer Science and Engineering: Project Phase - I Title Finalization SeminarYash HulkeNo ratings yet
- Self Operating CarDocument5 pagesSelf Operating CarkillerNo ratings yet
- # 30 Ojekunle Olamide PaulDocument29 pages# 30 Ojekunle Olamide PaulbinarifylimitedNo ratings yet
- A Review On Autonomous Delivery Robot Using Machine LearningDocument7 pagesA Review On Autonomous Delivery Robot Using Machine LearningIJRASETPublicationsNo ratings yet
- Electronics 10 03159 v2Document22 pagesElectronics 10 03159 v2Dan RiosNo ratings yet
- Vehicle Detection Trackingand CountingDocument8 pagesVehicle Detection Trackingand Countingkarthik bandlaNo ratings yet
- TemporalMotionlessanalysis - MIsba SiddiquiDocument30 pagesTemporalMotionlessanalysis - MIsba SiddiquiMisba SiddiquiNo ratings yet
- (IJCST-V10I3P21) :pratheesh S, Suraj Gowda K T, Sumanth C M, Ullaskumar K, YashavantDocument3 pages(IJCST-V10I3P21) :pratheesh S, Suraj Gowda K T, Sumanth C M, Ullaskumar K, YashavantEighthSenseGroupNo ratings yet
- CHAPTER-I Smart ParkingDocument6 pagesCHAPTER-I Smart ParkingKliu Senior Selestre VillanuevaNo ratings yet
- Integration of Open Source Platform Duckietown and Gesture Recognition As An Interactive Interface For The Museum Robotic GuideDocument5 pagesIntegration of Open Source Platform Duckietown and Gesture Recognition As An Interactive Interface For The Museum Robotic GuideandreNo ratings yet
- Obstacle Detection System For Automobiles Using Contour AnalysisDocument4 pagesObstacle Detection System For Automobiles Using Contour AnalysiserpublicationNo ratings yet
- Dire Dawa University Institute of TechnologyDocument28 pagesDire Dawa University Institute of TechnologyAsed ZakirNo ratings yet
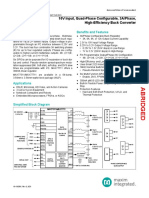
- MAX77511/MAX77711 10V Input, Quad-Phase Configurable, 3A/Phase, High-Efficiency Buck ConverterDocument3 pagesMAX77511/MAX77711 10V Input, Quad-Phase Configurable, 3A/Phase, High-Efficiency Buck ConvertermstrkoskiNo ratings yet
- Spark DocsDocument264 pagesSpark DocsJokin AlonsoNo ratings yet
- User's Guide: TMS320C5515/14/05/04 DSP Inter-IC Sound (I2S) BusDocument38 pagesUser's Guide: TMS320C5515/14/05/04 DSP Inter-IC Sound (I2S) BusDiana MaldonadoNo ratings yet
- Introduction To PIC Programming: Baseline Architecture and Assembly LanguageDocument37 pagesIntroduction To PIC Programming: Baseline Architecture and Assembly Languagenanodocl5099No ratings yet
- Raspberry Pi Documentation - Raspberry Pi OSDocument19 pagesRaspberry Pi Documentation - Raspberry Pi OSMulyadi KusumaNo ratings yet
- Embedded Systems For ECEDocument92 pagesEmbedded Systems For ECESurudhi AsokrajNo ratings yet
- Rh850/F1X Starterkit: User Manual: Hardware Renesas Mcu Rh850 F-SeriesDocument32 pagesRh850/F1X Starterkit: User Manual: Hardware Renesas Mcu Rh850 F-SeriesAvdimonNo ratings yet
- Raspberry Pi Seminar ReportDocument32 pagesRaspberry Pi Seminar ReportSruthi Reddy0% (1)
- Lab GPDocument15 pagesLab GPpremNo ratings yet
- TMS320C2000™ DIM168 Experimenter's Kit Quick Start Guide - Spruft7Document4 pagesTMS320C2000™ DIM168 Experimenter's Kit Quick Start Guide - Spruft7kiwiapple8888No ratings yet
- TMS320LF2401AVFADocument134 pagesTMS320LF2401AVFAPREVISTONo ratings yet
- Guia de Referencia Comandos ATDocument717 pagesGuia de Referencia Comandos ATtemporal temporalNo ratings yet
- ARM® Cortex®-M3 Based 32-Bit MCUDocument90 pagesARM® Cortex®-M3 Based 32-Bit MCUtangtakatatangNo ratings yet
- Group 4 ReportDocument45 pagesGroup 4 Report1DS18EE057 Shreya KulkarniNo ratings yet
- Introducting Itsy Bitsy 32u4Document21 pagesIntroducting Itsy Bitsy 32u4Pavan UNo ratings yet
- UM2039 User Manual: World Smallest Time-of-Flight Ranging and Gesture Detection Sensor Application Programming InterfaceDocument26 pagesUM2039 User Manual: World Smallest Time-of-Flight Ranging and Gesture Detection Sensor Application Programming InterfacepepenitoNo ratings yet
- Improving Noise Immunity For Serial InterfaceDocument7 pagesImproving Noise Immunity For Serial InterfaceshubhamformeNo ratings yet
- TSUM56AL MstarDocument95 pagesTSUM56AL Mstarwilliam tolentinoNo ratings yet
- Bga900c80p30x30 2500X2500X355 Ti Fcbga CMS S-Pbga-N900 PDFDocument298 pagesBga900c80p30x30 2500X2500X355 Ti Fcbga CMS S-Pbga-N900 PDFMohan K SNo ratings yet
- Android Things Quick Start GuideDocument185 pagesAndroid Things Quick Start GuideAshraf MostafaNo ratings yet
- Raspberry Pi Pico Python SDKDocument46 pagesRaspberry Pi Pico Python SDKMcQ Soft100% (1)
- ARM7 LPC2148 Microcontroller Memory & GPIO Pin ProgrammingDocument4 pagesARM7 LPC2148 Microcontroller Memory & GPIO Pin ProgrammingPalani PicoNo ratings yet
- BrightSign Built-In ManualDocument18 pagesBrightSign Built-In ManualecdkNo ratings yet
- Plagiarism - ReportDocument61 pagesPlagiarism - ReportMahbubul IslamNo ratings yet
- Efabless Caravel PicoRV32 SoC OverviewDocument30 pagesEfabless Caravel PicoRV32 SoC OverviewLe HuyNo ratings yet