You might also like
- LECTURE 11,12 Camera Models: CSE 320 Graphics ProgrammingDocument71 pagesLECTURE 11,12 Camera Models: CSE 320 Graphics ProgrammingIsaac Joel RajNo ratings yet
- Lect 2Document30 pagesLect 2Hermain KarimNo ratings yet
- Lecture Week 2A 2018 PDFDocument89 pagesLecture Week 2A 2018 PDFalfalfa manNo ratings yet
- Image RepresentationDocument63 pagesImage RepresentationAmira Mat AminNo ratings yet
- Lect 7Document59 pagesLect 7Duong TheNo ratings yet
- Wenzel-Real-time Atmospheric Effects in GamesDocument39 pagesWenzel-Real-time Atmospheric Effects in GamesStar ZhangNo ratings yet
- Measuring Height: T B R R B TDocument51 pagesMeasuring Height: T B R R B TПавел СоколовNo ratings yet
- Chapter2 Image FormationDocument68 pagesChapter2 Image FormationGhassan HasnainNo ratings yet
- Geometric Transformation-2D UpdatedDocument57 pagesGeometric Transformation-2D Updatedzain javaidNo ratings yet
- Ray Casting 1Document14 pagesRay Casting 1Jovana KnezevicNo ratings yet
- ProjectionsDocument9 pagesProjectionsstrrrweNo ratings yet
- From Vertices To Fragments: Rasterization: Frame BufferDocument22 pagesFrom Vertices To Fragments: Rasterization: Frame BufferPallavi PatilNo ratings yet
- 03 ProjectionDocument64 pages03 Projectionlolopopo28No ratings yet
- Computer Graphics Lecture 4Document55 pagesComputer Graphics Lecture 4Crystal DzebuNo ratings yet
- Image Formation: DD2423 Image Analysis and Computer VisionDocument45 pagesImage Formation: DD2423 Image Analysis and Computer VisionTrọng QuảngNo ratings yet
- 6 - Projection, Mesh 1Document68 pages6 - Projection, Mesh 1ONCE ThaqiefNo ratings yet
- cs405 02 RenderingPipeline NEWDocument24 pagescs405 02 RenderingPipeline NEWCeren HaydarogluNo ratings yet
- Computer Vision Projective Geometry and Calibration: Professor HagerDocument67 pagesComputer Vision Projective Geometry and Calibration: Professor Hagersab108No ratings yet
- Computer Vision: Spring 2006 15-385,-685 Instructor: S. Narasimhan Wean 5403 T-R 3:00pm - 4:20pmDocument34 pagesComputer Vision: Spring 2006 15-385,-685 Instructor: S. Narasimhan Wean 5403 T-R 3:00pm - 4:20pmramnbantunNo ratings yet
- Computer Vision and Image Computer Vision and Image Processing (CSEL Processing (CSEL - 393) 393) 3Document19 pagesComputer Vision and Image Computer Vision and Image Processing (CSEL Processing (CSEL - 393) 393) 3ali sheikhNo ratings yet
- Canonical View Volume Orthographic Projection Perspective Projection Shirley Chapter 7Document30 pagesCanonical View Volume Orthographic Projection Perspective Projection Shirley Chapter 7SHYRA APRIL JOY DELA CRUZNo ratings yet
- CVP 3D Vision System Development Mattias JohannessonDocument91 pagesCVP 3D Vision System Development Mattias JohannessonHankook KimNo ratings yet
- 02 DigitalImageFundamentalsDocument22 pages02 DigitalImageFundamentalsAshutosh Pandey 16BEC0203No ratings yet
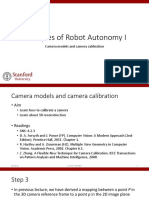
- Principles of Robot Autonomy I: Camera Models and Camera CalibrationDocument20 pagesPrinciples of Robot Autonomy I: Camera Models and Camera CalibrationratjerryNo ratings yet
- 3D Viewing & Clipping: Announcements Where Do Geometries Come From?Document6 pages3D Viewing & Clipping: Announcements Where Do Geometries Come From?Indrajeet KumarNo ratings yet
- Smallpt Cline SlidesDocument77 pagesSmallpt Cline SlideskingtrueoneNo ratings yet
- Today's Lecture: Repetition and Refinement of Image BasicsDocument36 pagesToday's Lecture: Repetition and Refinement of Image BasicsAli KassabNo ratings yet
- 14 MoreMosaicsDocument37 pages14 MoreMosaicsxolraxNo ratings yet
- CG - Unit - V 2020Document26 pagesCG - Unit - V 2020Arun ArunNo ratings yet
- 02Document48 pages02Yogesh KatreNo ratings yet
- ESE558 Digital Image ProcessingDocument28 pagesESE558 Digital Image ProcessingSankalp_Kallakur_402No ratings yet
- FundamentalsDocument71 pagesFundamentalssanju_arora19No ratings yet
- Phong TR-LyonDocument34 pagesPhong TR-Lyoncebila9115No ratings yet
- Lecture4 - Convnets For CV SlideDocument65 pagesLecture4 - Convnets For CV SlidemohdharislcpNo ratings yet
- ECE 472/572 - Digital Image Processing: Lecture 1 - IntroductionDocument30 pagesECE 472/572 - Digital Image Processing: Lecture 1 - IntroductionirfanNo ratings yet
- Coordinate SystemsDocument40 pagesCoordinate Systemsgetchew100% (1)
- Dpatra 3D Vision and Geometry NewDocument89 pagesDpatra 3D Vision and Geometry NewRitunjay GuptaNo ratings yet
- GlobalMotion Image ProcessingDocument62 pagesGlobalMotion Image ProcessingRinku PalNo ratings yet
- Investigating Deep Optics Model Representation in Affecting Resolved All-In-Focus Image Quality and Depth Estimation Fidelity: SupplementDocument11 pagesInvestigating Deep Optics Model Representation in Affecting Resolved All-In-Focus Image Quality and Depth Estimation Fidelity: SupplementJ SpencerNo ratings yet
- Lec 9Document51 pagesLec 9Saad khalilNo ratings yet
- Graphics Systems and Models: TopicsDocument15 pagesGraphics Systems and Models: TopicsElistinNo ratings yet
- Image Enhancement in The Spatial Domain (Chapter 3)Document17 pagesImage Enhancement in The Spatial Domain (Chapter 3)preethithamilanbanNo ratings yet
- 18DIP Lab 3Document9 pages18DIP Lab 3Abdul AhadNo ratings yet
- Motion EstimationDocument58 pagesMotion Estimationramanaidu1No ratings yet
- Now PlayingDocument43 pagesNow PlayingCharles MatuNo ratings yet
- Spatial Domain Image Processing)Document64 pagesSpatial Domain Image Processing)Getachew Yizengaw Enyew0% (1)
- Cameras Stereo 17 InkDocument87 pagesCameras Stereo 17 Inkshiva chowdaryNo ratings yet
- Hidden Surface Removal - Computer GraphicsDocument10 pagesHidden Surface Removal - Computer GraphicsSyedkareem_hkgNo ratings yet
- Why Camera Modeling?: Image ProcessingDocument10 pagesWhy Camera Modeling?: Image ProcessingRaju BhaiNo ratings yet
- L2v1 Image FormationDocument42 pagesL2v1 Image FormationAgha KazimNo ratings yet
- 168 442 Introduction To Image ProcessingDocument45 pages168 442 Introduction To Image ProcessingRajeeva_Navada_8112No ratings yet
- MosaicDocument36 pagesMosaicheyanithaNo ratings yet
- Computer Graphics Challenges: - Suppose We Can Create A Precise Computer Representation of The 3D World - QuestionsDocument6 pagesComputer Graphics Challenges: - Suppose We Can Create A Precise Computer Representation of The 3D World - QuestionsD SNo ratings yet
- L7.Image GeometryDocument47 pagesL7.Image GeometryApple ForScaleNo ratings yet
- Spectral TechniquesDocument42 pagesSpectral TechniquesHIMANI NARAIN HIMANI NARAINNo ratings yet
- L4 3D SceneSensing 2022Document156 pagesL4 3D SceneSensing 2022Joonas PalonenNo ratings yet
- L4 3D SceneSensing 2022Document156 pagesL4 3D SceneSensing 2022Joonas PalonenNo ratings yet
- L5 DisplaysDocument70 pagesL5 DisplaysJoonas PalonenNo ratings yet
- L2 - Representation - of - 3D - Data 2021Document124 pagesL2 - Representation - of - 3D - Data 2021Joonas PalonenNo ratings yet
- 3D and Virtual Reality-lecture01-YWM01-004Document80 pages3D and Virtual Reality-lecture01-YWM01-004Joonas PalonenNo ratings yet
- 3D Displays BanksDocument42 pages3D Displays BanksJoonas PalonenNo ratings yet
- MEC Threads ChartDocument12 pagesMEC Threads ChartenricoNo ratings yet
- MPL Construction PDFDocument40 pagesMPL Construction PDFSheraz QamerNo ratings yet
- 4mb/01r-Que-2023 Jun Edexcel PastpaperDocument24 pages4mb/01r-Que-2023 Jun Edexcel Pastpaperaugust.shwanNo ratings yet
- 21 Century Mind ControlDocument7 pages21 Century Mind ControltrswartzNo ratings yet
- 12abmb2 Group4 Chapter1Document20 pages12abmb2 Group4 Chapter1Kenneth Del RosarioNo ratings yet
- R0221120 - Salsabilla Cindy Pratama - Daily ActivityDocument15 pagesR0221120 - Salsabilla Cindy Pratama - Daily Activitysalsabilla cindy pratamaNo ratings yet
- Newton Interviews - Tookie AngusDocument12 pagesNewton Interviews - Tookie AngusPeter BellNo ratings yet
- Metal-Tek Electric Contact Cleaner Spray - TDS (2021)Document1 pageMetal-Tek Electric Contact Cleaner Spray - TDS (2021)metal-tek asteNo ratings yet
- V + V Plus - EN1Document6 pagesV + V Plus - EN1james.anitNo ratings yet
- Catalyst PreparationDocument15 pagesCatalyst PreparationVISHAL SHARMANo ratings yet
- Biochemistry - Syllabus Marks EtcDocument8 pagesBiochemistry - Syllabus Marks EtcshahzebNo ratings yet
- Bio-Gro HyperGrowth Lean Mass FinalDocument17 pagesBio-Gro HyperGrowth Lean Mass FinalMarcelo Calderón Cruz80% (5)
- REE0913ra LegazpiDocument6 pagesREE0913ra LegazpiScoopBoyNo ratings yet
- Chemical Engineering Refresher CourseDocument7 pagesChemical Engineering Refresher CourseAstra BeckettNo ratings yet
- MAPEH (P.E.) : Quarter 1 - Module 1: Physical Activity Pyramid For Young LearnersDocument11 pagesMAPEH (P.E.) : Quarter 1 - Module 1: Physical Activity Pyramid For Young LearnersAlbert Ian CasugaNo ratings yet
- CompAir 4-Pages SmartAir MasterDocument4 pagesCompAir 4-Pages SmartAir MasterKaisar Ahmed BhuyanNo ratings yet
- 2nd Round Selected StudentsDocument1 page2nd Round Selected StudentsSiri KRNo ratings yet
- ED1021 - I/O Expander With UART Interface & Analog Inputs: PreliminaryDocument9 pagesED1021 - I/O Expander With UART Interface & Analog Inputs: PreliminaryMilan NovakovićNo ratings yet
- 4g Frequency BandsDocument5 pages4g Frequency BandsaorukoNo ratings yet
- The Guardian Weekly 9-02-2024-2Document64 pagesThe Guardian Weekly 9-02-2024-2krris.galNo ratings yet
- HINO Dutro Fault Codes List PDFDocument4 pagesHINO Dutro Fault Codes List PDFANH LÊNo ratings yet
- Introduction On Photogrammetry Paul R WolfDocument33 pagesIntroduction On Photogrammetry Paul R Wolfadnan yusufNo ratings yet
- At Home Activities Mathlink Cubes Big BuildersDocument7 pagesAt Home Activities Mathlink Cubes Big BuildersdrchiNo ratings yet
- Woodcock 1987Document37 pagesWoodcock 1987Rodrigo MachadoNo ratings yet
- Traina 250Wp PDFDocument2 pagesTraina 250Wp PDFSherifImamNo ratings yet
- Mungbean 03india PDFDocument194 pagesMungbean 03india PDFSrujana PatelNo ratings yet
- Nuitration in Human 3Document2 pagesNuitration in Human 3Usman AmeenNo ratings yet
- Perbedaan Fermentasi Dan Respirasi Anaerob (Campbell Biology 12th Ed.)Document4 pagesPerbedaan Fermentasi Dan Respirasi Anaerob (Campbell Biology 12th Ed.)Oppof7 OppoNo ratings yet
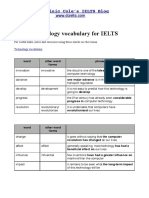
- Technology VocabularyDocument3 pagesTechnology VocabularyChixo GalaxyNo ratings yet
- Interzinc 2280 Product BrochureDocument4 pagesInterzinc 2280 Product BrochureAshish Raul CIENo ratings yet