You might also like
- Understanding Vector Calculus: Practical Development and Solved ProblemsFrom EverandUnderstanding Vector Calculus: Practical Development and Solved ProblemsNo ratings yet
- Lec 5Document8 pagesLec 5stathiss11No ratings yet
- Raindrop Algorithm for Finding Global Optimal Solutions in Non-linear ProgrammingDocument4 pagesRaindrop Algorithm for Finding Global Optimal Solutions in Non-linear ProgrammingbarijitNo ratings yet
- Assignment 4: Rigid Body Dynamics: Due April 14 at 11:59pmDocument5 pagesAssignment 4: Rigid Body Dynamics: Due April 14 at 11:59pmMDR PRAPHUNo ratings yet
- Lec 14Document98 pagesLec 14samarjeetNo ratings yet
- Comparing Riemann and Monte Carlo ApproximationDocument8 pagesComparing Riemann and Monte Carlo ApproximationryanfieldNo ratings yet
- Machine Learning NotesDocument11 pagesMachine Learning NotesxX ANGEL XxNo ratings yet
- A Local Collision Avoidance Method For Non-Strictly Convex PolyhedraDocument8 pagesA Local Collision Avoidance Method For Non-Strictly Convex PolyhedrathedeathhdNo ratings yet
- David DiagonalizationDocument15 pagesDavid DiagonalizationfangzhouNo ratings yet
- Lec 17Document10 pagesLec 17stathiss11No ratings yet
- The Reality of Virtual Environments: Jean-Christian DelannoyDocument3 pagesThe Reality of Virtual Environments: Jean-Christian DelannoyHany ElGezawyNo ratings yet
- ETH Zurich - Mechanics of Building Materials, Elastic TheoryDocument64 pagesETH Zurich - Mechanics of Building Materials, Elastic TheoryYan Naung KoNo ratings yet
- Introduction To CFD Basics Rajesh BhaskaranDocument17 pagesIntroduction To CFD Basics Rajesh BhaskaranSuta VijayaNo ratings yet
- Nithin K Rajendran July-NovemberDocument4 pagesNithin K Rajendran July-NovembernithinNo ratings yet
- Astro Dynamics SummaryDocument24 pagesAstro Dynamics SummaryJuan M.L.No ratings yet
- Calculus 223017512Document13 pagesCalculus 223017512nahianrahman0011No ratings yet
- Use COMSOL for efficient inverse modeling of aquifersDocument8 pagesUse COMSOL for efficient inverse modeling of aquifersLexin LiNo ratings yet
- Trebuchet Classic MechanicsDocument11 pagesTrebuchet Classic MechanicsJuan Jo MonrroyNo ratings yet
- MTamis ConstraintBasedPhysicsSolverDocument31 pagesMTamis ConstraintBasedPhysicsSolverlucianobuglioniNo ratings yet
- Globally Optimal Consensus Set Maximization Through Rotation SearchDocument13 pagesGlobally Optimal Consensus Set Maximization Through Rotation Searchonlymag4uNo ratings yet
- Anon2021 Approximate Birkhoff-von-Neumann Decomposition A Differentiable ApproachDocument15 pagesAnon2021 Approximate Birkhoff-von-Neumann Decomposition A Differentiable Approachhans wurstNo ratings yet
- Particle Kinematics ExplainedDocument85 pagesParticle Kinematics ExplainedDuchin AnNo ratings yet
- Numerical Methods To Liouville EquationnDocument39 pagesNumerical Methods To Liouville EquationnRachel Baltazar VitancolNo ratings yet
- Method of Steepest Descent and Its Applications: Department of Engineering, University of Tennessee, Knoxville, TN 37996Document3 pagesMethod of Steepest Descent and Its Applications: Department of Engineering, University of Tennessee, Knoxville, TN 37996seenagregoryNo ratings yet
- Continuity EquationDocument5 pagesContinuity EquationCh ArsalanNo ratings yet
- 0054 Handout 11Document19 pages0054 Handout 11zcaptNo ratings yet
- Mvanginkel Radonandhough tr2004Document11 pagesMvanginkel Radonandhough tr2004Musadiq HussainNo ratings yet
- StokesFlowSimulation TutorialDocument20 pagesStokesFlowSimulation TutorialHridey GuptaNo ratings yet
- Motion (Freely Falling Bodies and Projectile Motion) : Course Learning OutcomesDocument9 pagesMotion (Freely Falling Bodies and Projectile Motion) : Course Learning OutcomesYoo JungNo ratings yet
- Introduction To Polymer - Chapter 9Document39 pagesIntroduction To Polymer - Chapter 9Abrham HaileNo ratings yet
- HSSRPTR - Plus One Phy Questions Bank 2023 HssreporterDocument98 pagesHSSRPTR - Plus One Phy Questions Bank 2023 HssreporterShimi BasheerNo ratings yet
- Report On Nonlinear DynamicsDocument24 pagesReport On Nonlinear DynamicsViraj NadkarniNo ratings yet
- Motion Physics KinematicsDocument96 pagesMotion Physics KinematicsMadhurima MaityNo ratings yet
- Mpi I 97 1 010Document9 pagesMpi I 97 1 010Anant ChhajwaniNo ratings yet
- On Contrastive Divergence LearningDocument8 pagesOn Contrastive Divergence Learningkorn651No ratings yet
- Filtering Digital Elevation Models Conference PaperDocument10 pagesFiltering Digital Elevation Models Conference Papertulus kurniawanNo ratings yet
- The Importance of the CFL Condition in Solving PDEs NumericallyDocument3 pagesThe Importance of the CFL Condition in Solving PDEs NumericallyAndrés Felipe Vélez AcevedoNo ratings yet
- Operation ResearchDocument10 pagesOperation Researchkawaljeet_singhNo ratings yet
- CL319Lecture Notes L36!37!5Document4 pagesCL319Lecture Notes L36!37!5Preeti KumariNo ratings yet
- Determining Kinetic MotionDocument9 pagesDetermining Kinetic MotionĐình TháiNo ratings yet
- Vectors and Tensors in Curved Space Time: Physics Dep., University College CorkDocument19 pagesVectors and Tensors in Curved Space Time: Physics Dep., University College Corkrebe53No ratings yet
- Gord Is 1979Document12 pagesGord Is 1979NixonNo ratings yet
- Mujeeb Ur Rehman and Umer Saeed: C 2015 Korean Mathematical SocietyDocument28 pagesMujeeb Ur Rehman and Umer Saeed: C 2015 Korean Mathematical SocietyVe LopiNo ratings yet
- Fully Dynamic Maximal Matching in O (Log N) Update TimeDocument32 pagesFully Dynamic Maximal Matching in O (Log N) Update TimeManojNo ratings yet
- Class Notes - Part II PDFDocument26 pagesClass Notes - Part II PDFShrishti GhoshNo ratings yet
- Mae5230 CFD Intro Notes PDFDocument17 pagesMae5230 CFD Intro Notes PDFAlex IskandarNo ratings yet
- Pattern Recognition 38 (2005) 2494 – 2505Document12 pagesPattern Recognition 38 (2005) 2494 – 2505Diego CornelioNo ratings yet
- 8 DOF Redundant RobotDocument8 pages8 DOF Redundant RobotXavier WallerNo ratings yet
- Volino 1995Document11 pagesVolino 1995Sachin GNo ratings yet
- Schwartzchild Solution and Einstein's General RelativityDocument23 pagesSchwartzchild Solution and Einstein's General RelativityAarsha NaranatNo ratings yet
- Carson PDFDocument23 pagesCarson PDFWaheed SadiqNo ratings yet
- A Quasi-Boundary Semi-Analytical Method For Backward in Time Advection-Dispersion EquationDocument26 pagesA Quasi-Boundary Semi-Analytical Method For Backward in Time Advection-Dispersion EquationmmrmathsiubdNo ratings yet
- Proportional Navigation Miss Distance in The PreseDocument9 pagesProportional Navigation Miss Distance in The Preseali_raza117No ratings yet
- Ps 4Document2 pagesPs 4baoke renNo ratings yet
- Tackling The Gross-Pitaevskii Energy Functional With The Sobolev Gradient - Analytical and Numerical ResultsDocument30 pagesTackling The Gross-Pitaevskii Energy Functional With The Sobolev Gradient - Analytical and Numerical ResultscocoaramirezNo ratings yet
- Computational Fluid DynamicsDocument11 pagesComputational Fluid DynamicsAnup SinghNo ratings yet
- Comp Free Surf Flows C2Document42 pagesComp Free Surf Flows C2billNo ratings yet
- Lecture NotesDocument48 pagesLecture NotesWendy Mae LapuzNo ratings yet
- EigifpDocument11 pagesEigifpSepliongNo ratings yet
- A Data-Driven Game Object System: Scott Bilas Gas Powered GamesDocument41 pagesA Data-Driven Game Object System: Scott Bilas Gas Powered GamesDenis Tyurin0% (1)
- Halo Gdc02 Jaime GriesemerDocument27 pagesHalo Gdc02 Jaime GriesemerWagner de SouzaNo ratings yet
- Duran AlexDocument64 pagesDuran AlexKamilaNo ratings yet
- 2018academy - About CodeDocument36 pages2018academy - About CodemasterhacksNo ratings yet
- DepthDocument7 pagesDepthmasterhacksNo ratings yet
- Anatomy of Physics EngineDocument40 pagesAnatomy of Physics EnginemasterhacksNo ratings yet
- Keyboard Shortcut Painter WindowsDocument1 pageKeyboard Shortcut Painter WindowsmasterhacksNo ratings yet
- Dual Quaternions for Rigid Transformation BlendingDocument10 pagesDual Quaternions for Rigid Transformation BlendingmasterhacksNo ratings yet
- Git Cheat Sheet Education PDFDocument2 pagesGit Cheat Sheet Education PDFnhungdieubatchotNo ratings yet
- Sigcse 18Document6 pagesSigcse 18masterhacksNo ratings yet
- Sigcse 18Document6 pagesSigcse 18masterhacksNo ratings yet
- Batch File ProgrammingDocument155 pagesBatch File ProgrammingTechnocrawl100% (28)
- Atlassian Git CheatsheetDocument2 pagesAtlassian Git CheatsheetDingleBerry McMemberBerryNo ratings yet
- Git Cheat Sheet Education PDFDocument2 pagesGit Cheat Sheet Education PDFnhungdieubatchotNo ratings yet
- Git InternalDocument120 pagesGit InternalأحمدالشوافيNo ratings yet
- Git Cheat Sheet Education PDFDocument2 pagesGit Cheat Sheet Education PDFnhungdieubatchotNo ratings yet
- Effective Cmake Daniel Pfeifer Cppnow 05-19-2017Document106 pagesEffective Cmake Daniel Pfeifer Cppnow 05-19-2017masterhacksNo ratings yet
- Static Reflection C++Document130 pagesStatic Reflection C++masterhacksNo ratings yet
- FUENTEDocument16 pagesFUENTEDiana Paola Gomez GarzonNo ratings yet
- An Introduction To InkscapeDocument101 pagesAn Introduction To InkscapemasterhacksNo ratings yet
- 5bx PlanDocument18 pages5bx Planjrpique100% (3)
- Process Template For PMS Report Unique Visitors To The EURES PortalDocument25 pagesProcess Template For PMS Report Unique Visitors To The EURES PortalzibuapaNo ratings yet
- Unity-Pro Difference Between Sizes PackagesDocument4 pagesUnity-Pro Difference Between Sizes Packageskhajohnsak prongjaiNo ratings yet
- College Algebra: Fifth EditionDocument78 pagesCollege Algebra: Fifth EditionMark Francis HernandezNo ratings yet
- Usb Cash Drawer InterfaceDocument6 pagesUsb Cash Drawer InterfacePuji Rahmat HidayatNo ratings yet
- AV Paper PDFDocument32 pagesAV Paper PDFSándor BányaiNo ratings yet
- Developing Trust in Virtual TeamsDocument26 pagesDeveloping Trust in Virtual TeamsbalbirNo ratings yet
- Read multiple query params in JAX-RSDocument51 pagesRead multiple query params in JAX-RSRadheshyam NayakNo ratings yet
- Microcontroller Based Automatic Power Factor Correction in MinesDocument52 pagesMicrocontroller Based Automatic Power Factor Correction in MinesDdumbaNo ratings yet
- Quotation Quotation: Modern Electronics Company LTDDocument1 pageQuotation Quotation: Modern Electronics Company LTDOsama MalikNo ratings yet
- Lava DoraDocument13 pagesLava DoraRay Zander FebresNo ratings yet
- C) Extremely Small: Multiple Choice Questions and Answers On Integrated CircuitsDocument123 pagesC) Extremely Small: Multiple Choice Questions and Answers On Integrated Circuitsmisba shaikhNo ratings yet
- 1200.2 SAS SSD Compatibility Report Summary RevD 2Document14 pages1200.2 SAS SSD Compatibility Report Summary RevD 2haibin qiNo ratings yet
- Delphi XE2 Foundations - Part 1 - Rolliston, ChrisDocument160 pagesDelphi XE2 Foundations - Part 1 - Rolliston, ChrisJoel Quezada100% (2)
- LSI Engineers Achieve Siemens SIMATIC PCS 7 Certification - Logical Systems, LLCDocument4 pagesLSI Engineers Achieve Siemens SIMATIC PCS 7 Certification - Logical Systems, LLCJemeraldNo ratings yet
- Structured Investigation of Digital Incidents in Complex Computing EnvironmentsDocument287 pagesStructured Investigation of Digital Incidents in Complex Computing EnvironmentsDr. Peter StephensonNo ratings yet
- Over Current Protection AnnexDocument20 pagesOver Current Protection Annexryumadmax100% (1)
- Self-Assessment Form for Computer Systems Servicing NC IIDocument8 pagesSelf-Assessment Form for Computer Systems Servicing NC IIOliver CalledoNo ratings yet
- Marketing Chapter 3Document14 pagesMarketing Chapter 3anneNo ratings yet
- RO-RG80-00031 - Rev H, JPPAP Templates (Jabil Production Part Approval Process)Document38 pagesRO-RG80-00031 - Rev H, JPPAP Templates (Jabil Production Part Approval Process)KM MuiNo ratings yet
- Resume for Manoj MadduriDocument3 pagesResume for Manoj MadduriSita Ram RamisettyNo ratings yet
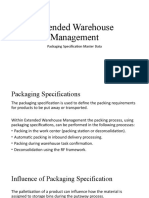
- 5.PPT5 Packaging+SpecificationsDocument13 pages5.PPT5 Packaging+SpecificationsVKNo ratings yet
- ReportDocument57 pagesReportNehul PatilNo ratings yet
- VB 6.0 TutorialsDocument19 pagesVB 6.0 TutorialsSantoshNo ratings yet
- Disaster Recovery Plan Check ListDocument5 pagesDisaster Recovery Plan Check ListRulingEmpror100% (5)
- Identifying the Utility Water Network at Kampung Idaman, Klang Using GISDocument14 pagesIdentifying the Utility Water Network at Kampung Idaman, Klang Using GISAthirah HattaNo ratings yet
- Advance Excel Processing Skills LessonDocument5 pagesAdvance Excel Processing Skills LessonAshley Jade DomalantaNo ratings yet
- EmbeddedDocument219 pagesEmbeddedkoceko100% (2)
- Sabai Firmware UpgradeDocument2 pagesSabai Firmware Upgrade00001010No ratings yet
- Jeemain - Ntaonline.in Frontend Web Advancecityintimationslip Admit-CardDocument5 pagesJeemain - Ntaonline.in Frontend Web Advancecityintimationslip Admit-CardthokalachandureddyNo ratings yet
- Knorish Creator Insights ReportDocument21 pagesKnorish Creator Insights ReportSameerNo ratings yet