You might also like
- Prologue: Managerial Accounting and The Business EnvironmentDocument156 pagesPrologue: Managerial Accounting and The Business EnvironmentMarcus MonocayNo ratings yet
- Test Method of Flammability of Interior Materials For AutomobilesDocument17 pagesTest Method of Flammability of Interior Materials For AutomobilesKarthic BhrabuNo ratings yet
- Stationary and Related Stochastic Processes: Sample Function Properties and Their ApplicationsFrom EverandStationary and Related Stochastic Processes: Sample Function Properties and Their ApplicationsRating: 4 out of 5 stars4/5 (2)
- Publication PDFDocument20 pagesPublication PDFBhaumik VaidyaNo ratings yet
- Basic English Grammar ChartDocument3 pagesBasic English Grammar Chartm1eme1mNo ratings yet
- Romanian Association of Drilling Contractors ACFRDocument83 pagesRomanian Association of Drilling Contractors ACFRFuBasho33% (3)
- Reliability of StructuresDocument10 pagesReliability of StructureshamadaniNo ratings yet
- Timedependent Statistics of The Ising Model: Additional Information On J. Math. PhysDocument15 pagesTimedependent Statistics of The Ising Model: Additional Information On J. Math. PhysozoNo ratings yet
- Path-Integral Evolution of Chaos Embedded in Noise: Duffing Neocortical AnalogDocument23 pagesPath-Integral Evolution of Chaos Embedded in Noise: Duffing Neocortical AnalogLester IngberNo ratings yet
- Marco Baldi Et Al - Hydrodynamical N-Body Simulations of Coupled Dark Energy CosmologiesDocument21 pagesMarco Baldi Et Al - Hydrodynamical N-Body Simulations of Coupled Dark Energy CosmologiesMuths999999No ratings yet
- Discretization of The Markov Regime Switching AR (1) Process: Yan Liu Wuhan UniversityDocument13 pagesDiscretization of The Markov Regime Switching AR (1) Process: Yan Liu Wuhan UniversityAbinash MishraNo ratings yet
- Ijbc DLG 2012 PDFDocument10 pagesIjbc DLG 2012 PDFbdat2010No ratings yet
- Signal Model For The Prediction of Wind Speed in NigeriaDocument8 pagesSignal Model For The Prediction of Wind Speed in NigeriariannataNo ratings yet
- Scale-Relativity and Quantization of Exoplanet Orbital Semi-Major AxesDocument9 pagesScale-Relativity and Quantization of Exoplanet Orbital Semi-Major AxesmnguyenNo ratings yet
- 1997a+a 320 1BDocument7 pages1997a+a 320 1Bga.simplicio2No ratings yet
- Introduction To Statistical Physics-57314317Document131 pagesIntroduction To Statistical Physics-57314317Augusto MenezesNo ratings yet
- Yin 2003Document15 pagesYin 2003Tigresita TigreNo ratings yet
- Spencer ContinuousTimeMarkovModels 2005Document8 pagesSpencer ContinuousTimeMarkovModels 2005anamavalenciNo ratings yet
- The Transfer Matrix Method in The Theory of Normal Vibrations of Chain MoleculesDocument37 pagesThe Transfer Matrix Method in The Theory of Normal Vibrations of Chain MoleculesTanmay JainNo ratings yet
- Annals of Physics: Meng Guo, Pavel Putrov, Juven WangDocument50 pagesAnnals of Physics: Meng Guo, Pavel Putrov, Juven WangAnonymous 4wofkS90XTNo ratings yet
- Jurnal StatistikDocument15 pagesJurnal Statistiksakurai hanaNo ratings yet
- Francisco C. Alcaraz Et Al - Three-Dimensional Spin Systems Without Long-Range OrderDocument26 pagesFrancisco C. Alcaraz Et Al - Three-Dimensional Spin Systems Without Long-Range OrderImaxSWNo ratings yet
- 1999 - Complex Systems A Physicists ViewpointDocument8 pages1999 - Complex Systems A Physicists ViewpointBeard Mangaka guyNo ratings yet
- On The Spectra of Randomly Perturbed Expanding Maps: Mathematical PhysicsDocument32 pagesOn The Spectra of Randomly Perturbed Expanding Maps: Mathematical PhysicskartikNo ratings yet
- Spectral Tests of Randomness For Spatial Point Patterns: Moiraa - Mugglestone AndericrenshawDocument15 pagesSpectral Tests of Randomness For Spatial Point Patterns: Moiraa - Mugglestone AndericrenshawHiep NguyenNo ratings yet
- Lectures On Ergodic Theory by PetersenDocument28 pagesLectures On Ergodic Theory by PetersenKelvin LagotaNo ratings yet
- Letter To The Editor: Scale-Relativity and Quantization of Extra-Solar Planetary SystemsDocument4 pagesLetter To The Editor: Scale-Relativity and Quantization of Extra-Solar Planetary SystemsmnguyenNo ratings yet
- Genus Statistics of The Virgo N-Body Simulations and The 1.2-Jy Redshift SurveyDocument20 pagesGenus Statistics of The Virgo N-Body Simulations and The 1.2-Jy Redshift Surveyneeraj12121No ratings yet
- Current ResearchDocument7 pagesCurrent ResearchziNo ratings yet
- Determination of The Stochastic Evolution Equation From NoisyDocument10 pagesDetermination of The Stochastic Evolution Equation From Noisygeorge lucasNo ratings yet
- Wavelets in Time Series Analysis: (Submitted)Document16 pagesWavelets in Time Series Analysis: (Submitted)fredsvNo ratings yet
- The Equilibrium Behavior of Reversible Coagulation-Fragmentation ProcessesDocument28 pagesThe Equilibrium Behavior of Reversible Coagulation-Fragmentation ProcessesJanCarlBrionesNo ratings yet
- Stan 391 Consistency LibreDocument54 pagesStan 391 Consistency LibreRezzy Eko CarakaNo ratings yet
- Particle-Wave Duality: A Dichotomy Between Symmetry and AsymmetryDocument9 pagesParticle-Wave Duality: A Dichotomy Between Symmetry and AsymmetryJoan VaccaroNo ratings yet
- On The Validity of The Carman-Kozeny Equation in Random Fibrous Media SrivastavaDocument10 pagesOn The Validity of The Carman-Kozeny Equation in Random Fibrous Media SrivastavakmNo ratings yet
- Fuzzy Stat ProbDocument24 pagesFuzzy Stat ProbAdam BenharratsNo ratings yet
- Stochastic ProcessDocument5 pagesStochastic ProcessFRANCESCO222No ratings yet
- Makoto@sbitp Ucsb EduDocument17 pagesMakoto@sbitp Ucsb EdutareghNo ratings yet
- Physics IIDocument76 pagesPhysics IINaresh KumarNo ratings yet
- Post Matrix Product State Methods To Tangent Space and BeyondDocument35 pagesPost Matrix Product State Methods To Tangent Space and BeyondLipeng ChenNo ratings yet
- Methods of Stochastic Field Theory in Non-Equilibrium Systems - Spontaneous Symmetry Breaking of ErgodicityDocument42 pagesMethods of Stochastic Field Theory in Non-Equilibrium Systems - Spontaneous Symmetry Breaking of ErgodicityOBXONo ratings yet
- Inference in Particle Tracking Experiments by Passing Messages Between ImagesDocument6 pagesInference in Particle Tracking Experiments by Passing Messages Between ImagesLiquan PeiNo ratings yet
- The Physical Meaning of Replica Symmetry BreakingDocument15 pagesThe Physical Meaning of Replica Symmetry BreakingpasomagaNo ratings yet
- Chua's Circuit and The Contemporary Qualitative Theory: C. MiraDocument4 pagesChua's Circuit and The Contemporary Qualitative Theory: C. MiraAjayaKumarKavalaNo ratings yet
- Fractals and EcologyDocument18 pagesFractals and EcologyAndre LanzerNo ratings yet
- Comparison of Recursive Neural Network and Markov ChainDocument6 pagesComparison of Recursive Neural Network and Markov Chainion firdausNo ratings yet
- Hamiltonian Systems of Calogero Type and Two Dimensional Yang-Mills TheoryDocument33 pagesHamiltonian Systems of Calogero Type and Two Dimensional Yang-Mills TheoryspanishramNo ratings yet
- Groth 2011Document10 pagesGroth 2011Hidayatul MustafidaNo ratings yet
- Hard-Disk Equation of State: First-Order Liquid-Hexatic Transition in Two Dimensions With Three Simulation MethodsDocument8 pagesHard-Disk Equation of State: First-Order Liquid-Hexatic Transition in Two Dimensions With Three Simulation MethodsOzanBurakEriçokNo ratings yet
- Continuous Time Markov Chain Models For Chemical Reaction NetworksDocument44 pagesContinuous Time Markov Chain Models For Chemical Reaction NetworksJchitPNo ratings yet
- Application of Stochastic Modeling in GeomagnetismDocument8 pagesApplication of Stochastic Modeling in GeomagnetismInternational Journal of Research in Engineering and TechnologyNo ratings yet
- AMR Juniper Hanifi Theofilis 2014Document43 pagesAMR Juniper Hanifi Theofilis 2014TomNo ratings yet
- Path-Integral Evolution of Multivariate Systems With Moderate NoiseDocument15 pagesPath-Integral Evolution of Multivariate Systems With Moderate NoiseLester IngberNo ratings yet
- Numerical Simulations in Stochastic MechanicsDocument14 pagesNumerical Simulations in Stochastic MechanicsjohanNo ratings yet
- 1 s2.0 S0022460X16000407 MainDocument17 pages1 s2.0 S0022460X16000407 MainLexin LINo ratings yet
- Josephson-Junction Ladder: A Benchmark For Nonlinear ConceptsDocument10 pagesJosephson-Junction Ladder: A Benchmark For Nonlinear ConceptsSadaf KhanNo ratings yet
- Neural Fields With Fast Learning Dynamic KernelDocument12 pagesNeural Fields With Fast Learning Dynamic KernelJuan Carlos Moreno OrtizNo ratings yet
- Projects 2015Document45 pagesProjects 2015Steven ArcadoNo ratings yet
- Lattttice BoltzmannDocument12 pagesLattttice Boltzmannjbhappy11No ratings yet
- Ruth Lazkoz, Genly Leon and Israel Quiros - Quintom Cosmologies With Arbitrary PotentialsDocument9 pagesRuth Lazkoz, Genly Leon and Israel Quiros - Quintom Cosmologies With Arbitrary PotentialsPollmqcNo ratings yet
- Phase-Field Simulation of 2-D Ostwald Ripening in The High Volume Fraction RegimeDocument13 pagesPhase-Field Simulation of 2-D Ostwald Ripening in The High Volume Fraction RegimeeidelsayedNo ratings yet
- TMP C19Document27 pagesTMP C19FrontiersNo ratings yet
- Entanglement Order Parameters and Critical Behavior For Topological Phase Transitions and BeyondDocument27 pagesEntanglement Order Parameters and Critical Behavior For Topological Phase Transitions and BeyondSamrat RoyNo ratings yet
- 2009-Fire Frequency and Subalpine Forest Succession Along A Topographic Gradient in Wyoming Author (S) William H - RomDocument9 pages2009-Fire Frequency and Subalpine Forest Succession Along A Topographic Gradient in Wyoming Author (S) William H - RomOplifora ThilastikaNo ratings yet
- 2013-Toward Near Real-Time Monitoring of Forest Disturbance by Fusion of MODIS and Landsat DataDocument14 pages2013-Toward Near Real-Time Monitoring of Forest Disturbance by Fusion of MODIS and Landsat DataOplifora ThilastikaNo ratings yet
- 2004-Detecting Important Categorical Land Changes While Accounting For PersistenceDocument18 pages2004-Detecting Important Categorical Land Changes While Accounting For PersistenceOplifora ThilastikaNo ratings yet
- 2004-Multimodel Inference Understanding AIC and BIC in Model SelectionDocument44 pages2004-Multimodel Inference Understanding AIC and BIC in Model SelectionOplifora ThilastikaNo ratings yet
- Multi-Purpose Three Phase Meter: CIRWATT SeriesDocument44 pagesMulti-Purpose Three Phase Meter: CIRWATT SeriesIsmail HussainNo ratings yet
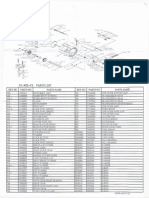
- Okuma CL302L Parts List & ManualDocument3 pagesOkuma CL302L Parts List & Manualcoolestkiwi100% (1)
- BT JOE Quiz 4 MasonryDocument1 pageBT JOE Quiz 4 Masonrycorazon phil100% (1)
- The Impact On Digital Marketing During Pandemic Outbreak COVID-19 On Business DevelopmentDocument5 pagesThe Impact On Digital Marketing During Pandemic Outbreak COVID-19 On Business DevelopmentInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Forcep DeliveryDocument11 pagesForcep DeliveryNishaThakuriNo ratings yet
- Aviation EbookDocument36 pagesAviation Ebookmeroka2000No ratings yet
- Gamla Stan PDFDocument4 pagesGamla Stan PDFAlexandra FricosuNo ratings yet
- TT21 28112019BNN (E)Document40 pagesTT21 28112019BNN (E)Thanh Tâm TrầnNo ratings yet
- Magellan 8300Document540 pagesMagellan 8300Fleming AlexanderNo ratings yet
- The Ghosts of 1898: Wilmington'S Race Riot and The Rise of White SupremacyDocument16 pagesThe Ghosts of 1898: Wilmington'S Race Riot and The Rise of White Supremacysherae9154532No ratings yet
- 6.5 Tectonics and EvidencesDocument28 pages6.5 Tectonics and Evidencesbook wormNo ratings yet
- Answer The Question According To The ListeningDocument10 pagesAnswer The Question According To The ListeningusuarioNo ratings yet
- SQL Server ManagementDocument185 pagesSQL Server ManagementnalinagcNo ratings yet
- NDC Format For Billing PADDocument3 pagesNDC Format For Billing PADShantkumar ShingnalliNo ratings yet
- 3.3 Motherboard SchematicsDocument49 pages3.3 Motherboard SchematicsJoanna WęgielNo ratings yet
- Most Popular Bootstrap Interview Questions and AnswersDocument6 pagesMost Popular Bootstrap Interview Questions and Answershassan TariqNo ratings yet
- Notifications Under The Motor Vehicles ActDocument33 pagesNotifications Under The Motor Vehicles ActSatyadip TeraiyaNo ratings yet
- Distress Manual PDFDocument51 pagesDistress Manual PDFEIRINI ZIGKIRIADOUNo ratings yet
- Anatomy Book For DoctorsDocument3 pagesAnatomy Book For DoctorsMuhammad JunaidNo ratings yet
- (Separation Pay - Legal Termination Due To Authorized Causes) National Federation of Labor v. Court of Appeals, 440 SCRA 604 (2004Document6 pages(Separation Pay - Legal Termination Due To Authorized Causes) National Federation of Labor v. Court of Appeals, 440 SCRA 604 (2004Jude FanilaNo ratings yet
- Survey-Questionnaire For The Study "Factors Affecting The Level of Comprehension in English of Grade 3 Students School Year 2021-2023"Document13 pagesSurvey-Questionnaire For The Study "Factors Affecting The Level of Comprehension in English of Grade 3 Students School Year 2021-2023"Rosalinda SamongNo ratings yet
- Design and Analysis Aircraft Nose and Nose Landing Gear PDFDocument8 pagesDesign and Analysis Aircraft Nose and Nose Landing Gear PDFTarik Hassan ElsonniNo ratings yet
- CV KM Roy Supit 01 April 2019Document3 pagesCV KM Roy Supit 01 April 2019Ephanama TehnikNo ratings yet
- Making Friends British English StudentDocument8 pagesMaking Friends British English StudentMily ArrayaNo ratings yet
- Honkon Laser PDFDocument18 pagesHonkon Laser PDFEvolution MedNo ratings yet