You might also like
- GENESYS QUICKSTART GUIDE: ROLL BEYOND SUCCESS AND FAILUREDocument6 pagesGENESYS QUICKSTART GUIDE: ROLL BEYOND SUCCESS AND FAILUREJohn MartinNo ratings yet
- Advanced C++ Interview Questions You'll Most Likely Be AskedFrom EverandAdvanced C++ Interview Questions You'll Most Likely Be AskedNo ratings yet
- GDPR Compliance in 6 StepsDocument19 pagesGDPR Compliance in 6 StepsSKUND PATHAKNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Compiler Design-Code OptimizationDocument150 pagesCompiler Design-Code OptimizationmanicheeseNo ratings yet
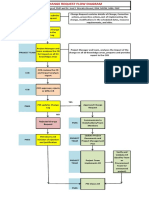
- Change Request Flow DiagramDocument2 pagesChange Request Flow DiagramSwapnil0% (1)
- CD UNIT V Basic BlocksDocument5 pagesCD UNIT V Basic BlocksAkashNo ratings yet
- Code OptimizationDocument58 pagesCode OptimizationAkula SandeepNo ratings yet
- Unit 5 - Sessions 3 - 6aDocument23 pagesUnit 5 - Sessions 3 - 6aDewashishNo ratings yet
- CD Unit-5Document30 pagesCD Unit-5Dr. K. Sivakumar - Assoc. Professor - AIDS NIETNo ratings yet
- 14-Code Optimization-Code GenerationDocument10 pages14-Code Optimization-Code GenerationYash BakshiNo ratings yet
- Code GenerationDocument42 pagesCode Generation61.Rasika MahajanNo ratings yet
- Compiler Ch9Document24 pagesCompiler Ch9api-3712520100% (1)
- Lecture NotesDocument13 pagesLecture NotesUjjwal SharmaNo ratings yet
- @@code OptimDocument20 pages@@code Optimobwani777No ratings yet
- Compilerdesignmodule VDocument26 pagesCompilerdesignmodule VV Yaswanth Sai 22114242113No ratings yet
- Darshan Sem7 170701 CD 2014Document81 pagesDarshan Sem7 170701 CD 2014harishpillai1994No ratings yet
- Code Optimization Unit-4-IIDocument27 pagesCode Optimization Unit-4-IIHimanshuNo ratings yet
- CS602PC - Compiler - Design - Lecture Notes - Unit - 5Document28 pagesCS602PC - Compiler - Design - Lecture Notes - Unit - 5Senthil Kumar SkumarNo ratings yet
- Number 3 Compiler Design CourseworkDocument3 pagesNumber 3 Compiler Design Courseworkiriama emmaNo ratings yet
- CD Unit-VDocument10 pagesCD Unit-VVasudevarao PeyyetiNo ratings yet
- 5CS4A-02 U5 L1-L7 BY DR - AnusuyaDocument28 pages5CS4A-02 U5 L1-L7 BY DR - Anusuyaapoorvasainimitrc2020No ratings yet
- Compiler Design Unit 5Document39 pagesCompiler Design Unit 5Shubham DixitNo ratings yet
- Unit V - Code Optimization and Code Generation: Sri Vidya College of Engineering and Technology Course MaterialDocument41 pagesUnit V - Code Optimization and Code Generation: Sri Vidya College of Engineering and Technology Course Materialsarala pulivarthiNo ratings yet
- Unit-Vi: Principle Sources of OptimizationDocument11 pagesUnit-Vi: Principle Sources of OptimizationBalaji DandeNo ratings yet
- Peephole Optimization TechniquesDocument40 pagesPeephole Optimization TechniquesVijaykumar KamlekarNo ratings yet
- Unit V - Code Optimization and Code Generation: Course MaterialDocument41 pagesUnit V - Code Optimization and Code Generation: Course MaterialTanmay RaoNo ratings yet
- Code OptimizationDocument14 pagesCode OptimizationMruganki GuptaNo ratings yet
- Code OptimizationDocument42 pagesCode Optimizationudaykirangoru0% (1)
- CD Unit8Document11 pagesCD Unit8Rahul JhaNo ratings yet
- Chapter 9 Code GenerationDocument27 pagesChapter 9 Code Generationmikiberhanu41No ratings yet
- CH 5Document8 pagesCH 5mame MagnawNo ratings yet
- Lab 2 QuestionsDocument11 pagesLab 2 Questionsmac oneNo ratings yet
- Efficient Low-Level Programming Codes.: RulesDocument16 pagesEfficient Low-Level Programming Codes.: RulesFazle HannanNo ratings yet
- PROGRAMMING AND PROBLEM SOLVING (39Document17 pagesPROGRAMMING AND PROBLEM SOLVING (39Victor SarmacharjeeNo ratings yet
- Lecture 40Document15 pagesLecture 40F e e l i n g s অ নু ভূ তিNo ratings yet
- C Program Components GuideDocument107 pagesC Program Components GuideAmruta RegeNo ratings yet
- Unit 5 Compiler PDFDocument28 pagesUnit 5 Compiler PDFserneNo ratings yet
- CH06Document28 pagesCH06zemikeNo ratings yet
- RAS_Representation_Analysis_SoftwareDocument20 pagesRAS_Representation_Analysis_SoftwareRohit SinghNo ratings yet
- RUN-TIME STORAGE MANAGEMENTDocument7 pagesRUN-TIME STORAGE MANAGEMENTEyob WoretawNo ratings yet
- Unit 5 - Session 1 - 2Document23 pagesUnit 5 - Session 1 - 2DewashishNo ratings yet
- Code Generation and Instruction Selection Unit-8Document6 pagesCode Generation and Instruction Selection Unit-8Sridhar Vangapally VNo ratings yet
- C++ Proposed Exercises (Chapter 7: The C++ Programing Language, Fourth Edition)Document7 pagesC++ Proposed Exercises (Chapter 7: The C++ Programing Language, Fourth Edition)Mauricio BedoyaNo ratings yet
- Code OptmizeDocument41 pagesCode OptmizeAkshay SNo ratings yet
- Input To The Code GeneratorDocument62 pagesInput To The Code Generatorneotheone24No ratings yet
- Unit IIDocument80 pagesUnit IIVelmurugan T - ECENo ratings yet
- Introduction To Compilers: Jun.-Prof. Dr. Christian Plessl Custom Computing University of PaderbornDocument51 pagesIntroduction To Compilers: Jun.-Prof. Dr. Christian Plessl Custom Computing University of PaderbornHariharan ElangandhiNo ratings yet
- PSPP Two Marks Faq-First-Two-Units-2022Document12 pagesPSPP Two Marks Faq-First-Two-Units-2022thanushabaskarNo ratings yet
- 01 Intro CPPDocument2 pages01 Intro CPPmichaeldvrNo ratings yet
- 16 Marks Q &ADocument10 pages16 Marks Q &AidhayasakthiNo ratings yet
- I PUC Unit CDocument45 pagesI PUC Unit CAman kekkarNo ratings yet
- Code Generation Flow Graphs Basic BlocksDocument16 pagesCode Generation Flow Graphs Basic BlocksAbhiNo ratings yet
- R10 Compiler Design Unit-7 Code OptimizationDocument14 pagesR10 Compiler Design Unit-7 Code OptimizationStephenKarunakarNo ratings yet
- Compiler Design Unit 5 Part 2Document34 pagesCompiler Design Unit 5 Part 2aditya9105064404No ratings yet
- Code Optimization-IDocument12 pagesCode Optimization-IAakash D.VNo ratings yet
- Unit - 4 Pushdown AutomataDocument36 pagesUnit - 4 Pushdown AutomataVikas YadavNo ratings yet
- C++ - Lecures - Compressed Google-Over ViewDocument42 pagesC++ - Lecures - Compressed Google-Over ViewirinNo ratings yet
- CHAPTER-2Document91 pagesCHAPTER-2Gemechis GurmesaNo ratings yet
- C Storage Class: Local VariableDocument4 pagesC Storage Class: Local VariableHarshit NaikNo ratings yet
- Lab 1 AS review. Arithmetic and logic program debuggingDocument19 pagesLab 1 AS review. Arithmetic and logic program debuggingakkauntdlyaigrichegotoescheNo ratings yet
- 3.intermediate Code Generation PDFDocument27 pages3.intermediate Code Generation PDFAbhiNo ratings yet
- Laboratory Act1 - Basic Structure of C++Document63 pagesLaboratory Act1 - Basic Structure of C++charlene.dilig.mnlNo ratings yet
- Quadratic Functions ChapterDocument17 pagesQuadratic Functions ChapterCordova E ManuelNo ratings yet
- Huffman coding algorithm explainedDocument4 pagesHuffman coding algorithm explainedjajNo ratings yet
- ECE-416 Ethernet Tutorial QuestionsDocument1 pageECE-416 Ethernet Tutorial QuestionsBachu Saee RamNo ratings yet
- CssDocument3 pagesCssShhBansheeNo ratings yet
- Region VII School Brigada ReportDocument2 pagesRegion VII School Brigada ReportJundell DiazNo ratings yet
- Ni Pxi/Pci-5402/5406 Specifications: 14/16-Bit, 20/40 MHZ Arbitrary Function GeneratorDocument22 pagesNi Pxi/Pci-5402/5406 Specifications: 14/16-Bit, 20/40 MHZ Arbitrary Function GeneratorChecho260493No ratings yet
- Ground Sense Operational Amplifiers: Dat AsheetDocument56 pagesGround Sense Operational Amplifiers: Dat Asheettecnicogato27No ratings yet
- Petroleum Powerpoint TemplateDocument28 pagesPetroleum Powerpoint TemplateBUCHARA SURYA AL FALAHNo ratings yet
- BFX SeriesDocument10 pagesBFX SeriesPuji AntoroNo ratings yet
- Management Information Systems: James A O'Brien George M Marakas Ramesh BehlDocument59 pagesManagement Information Systems: James A O'Brien George M Marakas Ramesh BehlTanya SinghNo ratings yet
- IoT (15CS81) Module 4 Machine LearningDocument66 pagesIoT (15CS81) Module 4 Machine LearningRijo Jackson TomNo ratings yet
- Computer and Cibersecurity Project ReportDocument16 pagesComputer and Cibersecurity Project ReportShourav PodderNo ratings yet
- ST1 Arts6Document4 pagesST1 Arts6Dave TenorioNo ratings yet
- E Class Batch 40-30-29Document6 pagesE Class Batch 40-30-29Ed GollosoNo ratings yet
- Principal Technical Architect Job DescriptionDocument3 pagesPrincipal Technical Architect Job Descriptionmiguel ángel pelosNo ratings yet
- Ims DBDocument48 pagesIms DBAle GomesNo ratings yet
- 2018 Winter Model Answer PaperDocument26 pages2018 Winter Model Answer PaperParth patkarNo ratings yet
- Project Report FinalDocument69 pagesProject Report Finalrohitsaini2383% (6)
- IBM Cognos Analytics 11 Dashboards and Stories User GuideDocument206 pagesIBM Cognos Analytics 11 Dashboards and Stories User GuideDaniel Alexander Rivas NietoNo ratings yet
- 1960's Blue Plastic Crystal Radio Kit - Google SearchDocument1 page1960's Blue Plastic Crystal Radio Kit - Google SearchTerry CarrollNo ratings yet
- Manual NETLink-PRO 5Document67 pagesManual NETLink-PRO 5Carlos Salamanca FartoNo ratings yet
- Data Analyst with Experience in Reporting and AnalyticsDocument1 pageData Analyst with Experience in Reporting and AnalyticsKanakapriya VenkatesanNo ratings yet
- 2.8M GMAIL ComboDocument5 pages2.8M GMAIL ComboMichael HenryNo ratings yet
- VI Lect - Notes#3 Btech Vii Sem Aug Dec2022Document164 pagesVI Lect - Notes#3 Btech Vii Sem Aug Dec2022NAAZNo ratings yet
- PSS USGU PumpSim2-804364 PDFDocument28 pagesPSS USGU PumpSim2-804364 PDFŽeljko BokanovićNo ratings yet
- EsimDocument28 pagesEsimSandeep KuntaNo ratings yet
- Powershell Guide To Extract InformationDocument7 pagesPowershell Guide To Extract Informationapi-283890709No ratings yet