You might also like
- Modeling and Control of Power Electronic Converters for Microgrid ApplicationsFrom EverandModeling and Control of Power Electronic Converters for Microgrid ApplicationsNo ratings yet
- Bastos Et Al. - 2021 - U-Convolutional Model For Spatio-Temporal Wind SpeDocument22 pagesBastos Et Al. - 2021 - U-Convolutional Model For Spatio-Temporal Wind SpeDiego VidalNo ratings yet
- A Hybrid Wind Speed Forecasting Model Using Stacked Autoencoder and LSTMDocument17 pagesA Hybrid Wind Speed Forecasting Model Using Stacked Autoencoder and LSTMAtiexz 'husnul Khatimah'No ratings yet
- GruhDocument12 pagesGruhoctober87No ratings yet
- IET Generation Trans Dist - 2020 - Frizzo Stefenon - Hybrid Deep Learning For Power Generation Forecasting in ActiveDocument9 pagesIET Generation Trans Dist - 2020 - Frizzo Stefenon - Hybrid Deep Learning For Power Generation Forecasting in Activefernanda.cferreiraNo ratings yet
- Short Time Multi Energy Load Forecasting Method Based - 2021 - Machine LearningDocument9 pagesShort Time Multi Energy Load Forecasting Method Based - 2021 - Machine LearningKhalid AlHashemiNo ratings yet
- Assessing The Value of Forecast Based Dispatch in The OperationDocument10 pagesAssessing The Value of Forecast Based Dispatch in The OperationRafael SardinhaNo ratings yet
- Energy: Hui Liu, Chengqing Yu, Haiping Wu, Zhu Duan, Guangxi YanDocument18 pagesEnergy: Hui Liu, Chengqing Yu, Haiping Wu, Zhu Duan, Guangxi YanfvijayamiNo ratings yet
- Short-Term Wind Power Forecasts by A Synthetical Similar Time Series Data Mining Method 2018Document10 pagesShort-Term Wind Power Forecasts by A Synthetical Similar Time Series Data Mining Method 2018Houssem LoucheneNo ratings yet
- Castellani2014 PDFDocument10 pagesCastellani2014 PDFImmanuelKösherNo ratings yet
- Solar Energy: SciencedirectDocument11 pagesSolar Energy: SciencedirectsdfssdNo ratings yet
- A Sequence - To - Sequence Approach For Remaining Useful Lifetime Estimation Using Attention Augmented Bidirectional LSTMDocument18 pagesA Sequence - To - Sequence Approach For Remaining Useful Lifetime Estimation Using Attention Augmented Bidirectional LSTMowais khanNo ratings yet
- Solar Energy: SciencedirectDocument9 pagesSolar Energy: SciencedirectpremsonyNo ratings yet
- 1 s2.0 S2352484723011228 MainDocument9 pages1 s2.0 S2352484723011228 MainpallaveevbhatnagarNo ratings yet
- Predictive Modeling of PV Energy Production: How To Set Up The Learning Task For A Better Prediction?Document11 pagesPredictive Modeling of PV Energy Production: How To Set Up The Learning Task For A Better Prediction?kikizouzouNo ratings yet
- A Hybrid Forecasting Model Based On CNN and Informer For Short-Term Wind PowerDocument11 pagesA Hybrid Forecasting Model Based On CNN and Informer For Short-Term Wind PowerMBADJOUN DanielNo ratings yet
- Dynamic Line Rating Using Numerical Weather Predictions and Machine Learning A Case StudyDocument9 pagesDynamic Line Rating Using Numerical Weather Predictions and Machine Learning A Case Studymalekpour_ahmadNo ratings yet
- S030626192101059XDocument14 pagesS030626192101059Xlugo aldair cobeñas pereyraNo ratings yet
- Renewable Energy: Zhihong Pang, Fuxin Niu, Zheng O 'NeillDocument11 pagesRenewable Energy: Zhihong Pang, Fuxin Niu, Zheng O 'Neilloctober87No ratings yet
- Improving Renewable Energy Forecasting With A Grid of Numerical Weather PredictionsDocument10 pagesImproving Renewable Energy Forecasting With A Grid of Numerical Weather PredictionsJuan MataNo ratings yet
- GRUUNetDocument12 pagesGRUUNetAshish SinghNo ratings yet
- Sustainability 13 13735 v2Document15 pagesSustainability 13 13735 v2tariq aliNo ratings yet
- Solar Irradiance Prediction With Machine LearningDocument15 pagesSolar Irradiance Prediction With Machine LearningHabiba HassanNo ratings yet
- Multimodal SensorDocument16 pagesMultimodal SensorEsma ÖzelNo ratings yet
- Heterogeneous Data Fusion Considering Spatial CorrDocument32 pagesHeterogeneous Data Fusion Considering Spatial CorrSamuele TesfayeNo ratings yet
- 2020 Kong Short-Term Forecast AEDocument13 pages2020 Kong Short-Term Forecast AE구본찬No ratings yet
- 1 s2.0 S0263224120308162 MainDocument7 pages1 s2.0 S0263224120308162 MainjosuaNo ratings yet
- Effect of The Feature Vector Size On The Generalization ErrorDocument6 pagesEffect of The Feature Vector Size On The Generalization ErrorLUCAS HAASNo ratings yet
- Energies: Building Energy Consumption Prediction: An Extreme Deep Learning ApproachDocument20 pagesEnergies: Building Energy Consumption Prediction: An Extreme Deep Learning ApproachGagan AgarwalNo ratings yet
- Graph Neural Network-Based Anomaly Detection in Multivariate Time SeriesDocument9 pagesGraph Neural Network-Based Anomaly Detection in Multivariate Time SeriesKJNo ratings yet
- Energy and Buildings: Elena Mocanu, Phuong H. Nguyen, Wil L. Kling, Madeleine GibescuDocument10 pagesEnergy and Buildings: Elena Mocanu, Phuong H. Nguyen, Wil L. Kling, Madeleine GibescualiNo ratings yet
- Forecasting Solar PV Output Using Convolutional NeDocument15 pagesForecasting Solar PV Output Using Convolutional NeVikram AttiNo ratings yet
- Forecasting System With Sub-Model Selection StrateDocument28 pagesForecasting System With Sub-Model Selection StrateAaishiki GhoshNo ratings yet
- 1 s2.0 S2352484723013422 MainDocument13 pages1 s2.0 S2352484723013422 MainAkray AchseinNo ratings yet
- Solar Irradiance Forecasting in The Tropics Using Numerical WeatherDocument13 pagesSolar Irradiance Forecasting in The Tropics Using Numerical WeatherGian SanchezNo ratings yet
- 1 s2.0 S2590123022003103 MainDocument9 pages1 s2.0 S2590123022003103 MainJean Baptiste nkongoloNo ratings yet
- Sustainable Cities and SocietyDocument13 pagesSustainable Cities and Societyezhilarasi ezhilarsiNo ratings yet
- Atmosphere 14 01635Document27 pagesAtmosphere 14 01635Diego VidalNo ratings yet
- Sensors 21 04217 v2Document16 pagesSensors 21 04217 v2flNo ratings yet
- 50.-Long Short Term Memory-Convolutional Neural Network Based Deep hybrid-2021-CNN-LSTMDocument21 pages50.-Long Short Term Memory-Convolutional Neural Network Based Deep hybrid-2021-CNN-LSTMRONY ARTURO BOCANGEL SALASNo ratings yet
- Short Term Photovoltaic Power ForecastinDocument10 pagesShort Term Photovoltaic Power ForecastinTanio TanevNo ratings yet
- Neural NetworkDocument6 pagesNeural NetworkMuhammed Cihat AltınNo ratings yet
- KeywordsDocument8 pagesKeywordssteve rolansNo ratings yet
- HYGINUSDocument8 pagesHYGINUSsteve rolansNo ratings yet
- 1 s2.0 S2667305323000273 MainDocument18 pages1 s2.0 S2667305323000273 MainSumeet MitraNo ratings yet
- 23-02-2022-1645616523-6-.-1. Engg - Genetic Algorithm Approach For Target Coverage in Wireless Sensor NetworkDocument12 pages23-02-2022-1645616523-6-.-1. Engg - Genetic Algorithm Approach For Target Coverage in Wireless Sensor NetworkImpact JournalsNo ratings yet
- Enhanced Forecasting Accuracy of A Grid-ConnectedDocument21 pagesEnhanced Forecasting Accuracy of A Grid-Connectedgodfather121991No ratings yet
- Iot18 LassoDocument10 pagesIot18 LassolovediggerNo ratings yet
- Prediction of Solar Irradiance One Hour Ahead Based On Quantum Long Short-Term Memory NetworkDocument15 pagesPrediction of Solar Irradiance One Hour Ahead Based On Quantum Long Short-Term Memory NetworkPriya VKNo ratings yet
- Measurement: Massimo Lazzaroni, Stefano Ferrari, Vincenzo Piuri, Aysße Salman, Loredana Cristaldi, Marco FaiferDocument18 pagesMeasurement: Massimo Lazzaroni, Stefano Ferrari, Vincenzo Piuri, Aysße Salman, Loredana Cristaldi, Marco FaiferYatheesh KaggereNo ratings yet
- GINNDocument20 pagesGINNJunyoungParkNo ratings yet
- Optimizing Short-Term Photovoltaic Power Forecasting With Advanced Machine Learning TechniquesDocument21 pagesOptimizing Short-Term Photovoltaic Power Forecasting With Advanced Machine Learning TechniquesVinit MehtaNo ratings yet
- Hybrid Prediction Method of Solar Power Using Different Computational Intelligence AlgorithmsDocument6 pagesHybrid Prediction Method of Solar Power Using Different Computational Intelligence AlgorithmsBrijesh PrasadNo ratings yet
- Space Weather - 2023 - Yuan - Synthesis Style Auto Correlation Based Transformer A Learner On Ionospheric TEC SeriesDocument19 pagesSpace Weather - 2023 - Yuan - Synthesis Style Auto Correlation Based Transformer A Learner On Ionospheric TEC SeriesYiyang LuoLuoNo ratings yet
- A Decomposition-Clustering-Ensemble Learning Approach For Solar Radiation ForecastingDocument11 pagesA Decomposition-Clustering-Ensemble Learning Approach For Solar Radiation ForecastingHoussem LoucheneNo ratings yet
- Energy: Xuguang Wang, Xiao Li, Jie SuDocument16 pagesEnergy: Xuguang Wang, Xiao Li, Jie SuvedantvivekhireNo ratings yet
- Deep Learning Based Models For Solar EneDocument7 pagesDeep Learning Based Models For Solar Enehải BùiNo ratings yet
- 1 s2.0 S095741742301686X MainDocument10 pages1 s2.0 S095741742301686X Mainkurts010No ratings yet
- 41.-++A Robust Deep Learning Framework For Short-Term Wind Power Forecast-2021Document13 pages41.-++A Robust Deep Learning Framework For Short-Term Wind Power Forecast-2021RONY ARTURO BOCANGEL SALASNo ratings yet
- Energy Reports: Hui-Min Zuo, Jun Qiu, Ying-Hui Jia, Qi Wang, Fang-Fang LiDocument12 pagesEnergy Reports: Hui-Min Zuo, Jun Qiu, Ying-Hui Jia, Qi Wang, Fang-Fang LiNoverta EffendiNo ratings yet
- Engineering Design Research Methodology - 7.5 ECTS - PHD Course - Product Development Research LabDocument8 pagesEngineering Design Research Methodology - 7.5 ECTS - PHD Course - Product Development Research Laboctober87No ratings yet
- 2 RectifierDocument12 pages2 Rectifieroctober87No ratings yet
- Demand Side Management-Literature Review and Performance ComparisonDocument11 pagesDemand Side Management-Literature Review and Performance Comparisonoctober87No ratings yet
- Role of Optimization Techniques in MicrogridDocument22 pagesRole of Optimization Techniques in Microgridoctober87No ratings yet
- ProblemsDocument9 pagesProblemsoctober87No ratings yet
- Optimization Model For Expansion Planning of Distribution SystemDocument7 pagesOptimization Model For Expansion Planning of Distribution Systemoctober87No ratings yet
- 21 Virtual Synchronous Generator A Control Strategy ToDocument7 pages21 Virtual Synchronous Generator A Control Strategy Tooctober87No ratings yet
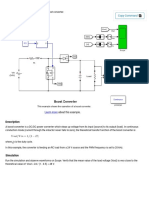
- Boost Converter - MATLAB & SimulinkDocument2 pagesBoost Converter - MATLAB & Simulinkoctober87No ratings yet
- Module 2Document37 pagesModule 2october87No ratings yet
- COMMUNICATION3Document3 pagesCOMMUNICATION3october87No ratings yet
- Experimental Verification of Virtual InertiaDocument6 pagesExperimental Verification of Virtual Inertiaoctober87No ratings yet
- Module 1Document38 pagesModule 1october87No ratings yet
- Building LSTM-Based Model For Solar Energy Forecasting - by Dr. Saptarsi Goswami - Towards Data ScienceDocument7 pagesBuilding LSTM-Based Model For Solar Energy Forecasting - by Dr. Saptarsi Goswami - Towards Data Scienceoctober87No ratings yet
- Search: Author Panel Sign inDocument19 pagesSearch: Author Panel Sign inoctober87No ratings yet
- Electric Power Systems Research: SciencedirectDocument12 pagesElectric Power Systems Research: Sciencedirectoctober87No ratings yet
- Fall in Electricity Markets Prices in March Due To The Coronavirus Crisis - AleaSoft Energy ForecastingDocument14 pagesFall in Electricity Markets Prices in March Due To The Coronavirus Crisis - AleaSoft Energy Forecastingoctober87No ratings yet
- Deep Learning Models For Solar Irradiance ForecastingDocument26 pagesDeep Learning Models For Solar Irradiance Forecastingoctober87No ratings yet
- Forecasting of Solar and Wind Power UsingDocument14 pagesForecasting of Solar and Wind Power Usingoctober87No ratings yet
- Multi-Time-Horizon Solar ForecastingDocument7 pagesMulti-Time-Horizon Solar Forecastingoctober87No ratings yet
- Short-Term Photovoltaic Power ForecastingDocument12 pagesShort-Term Photovoltaic Power Forecastingoctober87No ratings yet
- Automated Deep CNN-LSTM Architecture Design For Solar Irradiance ForecastingDocument12 pagesAutomated Deep CNN-LSTM Architecture Design For Solar Irradiance Forecastingoctober87No ratings yet
- Solar PVDocument8 pagesSolar PVoctober87No ratings yet
- Renewable Energy: Zhihong Pang, Fuxin Niu, Zheng O 'NeillDocument11 pagesRenewable Energy: Zhihong Pang, Fuxin Niu, Zheng O 'Neilloctober87No ratings yet
- Freeman-Crane Installation Devision - e FlyerDocument13 pagesFreeman-Crane Installation Devision - e Flyeroctober87No ratings yet
- Freeman QteDocument1 pageFreeman Qteoctober87No ratings yet
- Information 11 00032Document13 pagesInformation 11 00032october87No ratings yet
- Fundamentals of Power Electronics With MATLAB Randall ShafferDocument401 pagesFundamentals of Power Electronics With MATLAB Randall Shafferoctober87No ratings yet
- Quotation For Ac Maintanence - 25 April 2012Document4 pagesQuotation For Ac Maintanence - 25 April 2012october87No ratings yet
- Meeting TableDocument5 pagesMeeting Tableoctober87No ratings yet
- Endoscopic Image Classification Based On Explainable Deep LearningDocument14 pagesEndoscopic Image Classification Based On Explainable Deep LearningERFZE BlackNo ratings yet
- LTI System: Digital Signal ProcessingDocument40 pagesLTI System: Digital Signal ProcessingIrum Nausheen Lecturer - FETNo ratings yet
- AI CheatDocument13 pagesAI CheataaaNo ratings yet
- Question BankDocument12 pagesQuestion Bankjainayushtech100% (1)
- Data Collection: Face Recognigition System Block DiagramDocument5 pagesData Collection: Face Recognigition System Block DiagramgfcrfNo ratings yet
- Purdue AI and ML Dual Master Program - SlimUpDocument23 pagesPurdue AI and ML Dual Master Program - SlimUpRuchika MotwaniNo ratings yet
- CETM47-Ass1 TofunDocument12 pagesCETM47-Ass1 TofunAdetayoNo ratings yet
- Object Detection and Recognition: CS 534 Spring 2005: A. Elgammal Rutgers UniversityDocument25 pagesObject Detection and Recognition: CS 534 Spring 2005: A. Elgammal Rutgers UniversityshashankrrNo ratings yet
- Pensioner Verification ProposalDocument19 pagesPensioner Verification Proposalbinateasghar987No ratings yet
- Driver Drowsiness Detection System: Neil Gogte Institute of TechnologyDocument25 pagesDriver Drowsiness Detection System: Neil Gogte Institute of TechnologySadhwika ReddyNo ratings yet
- Assignment 5 - NNDocument4 pagesAssignment 5 - NNthecoolguy96No ratings yet
- Breast Cancer Detectionand Diagnosis Using Mammographic Data Systematic ReviewDocument22 pagesBreast Cancer Detectionand Diagnosis Using Mammographic Data Systematic ReviewmorganNo ratings yet
- Musical Therapy Through Facial Expression Recognizer Using Machine LearningDocument13 pagesMusical Therapy Through Facial Expression Recognizer Using Machine LearningIJRASETPublicationsNo ratings yet
- Electronics: Identification of Plant-Leaf Diseases Using CNN and Transfer-Learning ApproachDocument19 pagesElectronics: Identification of Plant-Leaf Diseases Using CNN and Transfer-Learning ApproachPrajwalNo ratings yet
- Project ReportDocument20 pagesProject ReportKk DataNo ratings yet
- Handwritten Javanese Script Recognition Method Based 12-Layers Deep Convolutional Neural Network and Data AugmentationDocument11 pagesHandwritten Javanese Script Recognition Method Based 12-Layers Deep Convolutional Neural Network and Data AugmentationIAES IJAINo ratings yet
- Advance Deep Learning Final. INeuronDocument17 pagesAdvance Deep Learning Final. INeuroninnovarsityNo ratings yet
- KERNEL Geometric Deep Learning: LeCunDocument22 pagesKERNEL Geometric Deep Learning: LeCunRubens ZimbresNo ratings yet
- 1 Low-Light Image Enhancement With Normalizing Flow 2022Document9 pages1 Low-Light Image Enhancement With Normalizing Flow 2022nguyễn hiềnNo ratings yet
- PHD Thesis On Neural NetworkDocument6 pagesPHD Thesis On Neural NetworkNancy Ideker100% (2)
- Intelligent Security Monitoring System With Video Based Face Recognition-DocumentationDocument52 pagesIntelligent Security Monitoring System With Video Based Face Recognition-Documentationshivani saiNo ratings yet
- 1 MC Culloh Pitts Neuron Model 22 Jul 2019material I 22 Jul 2019 Intro NewDocument58 pages1 MC Culloh Pitts Neuron Model 22 Jul 2019material I 22 Jul 2019 Intro NewBarry AllenNo ratings yet
- CS231n Convolutional Neural Networks For Visual Recognition 2Document12 pagesCS231n Convolutional Neural Networks For Visual Recognition 2famasyaNo ratings yet
- Classification of Breast Cancer Histopathological Images Using Discriminative Patches Screened by Generative Adversarial NetworksDocument16 pagesClassification of Breast Cancer Histopathological Images Using Discriminative Patches Screened by Generative Adversarial NetworksGuru VelmathiNo ratings yet
- Deep Learning-Based Strategies For The Detection and Tracking of Drones Using Several Cameras PDFDocument13 pagesDeep Learning-Based Strategies For The Detection and Tracking of Drones Using Several Cameras PDFManoj LNo ratings yet
- Cbse - Department of Skill Education Curriculum For Session 2021-2022Document15 pagesCbse - Department of Skill Education Curriculum For Session 2021-2022Tanish SwamiNo ratings yet
- ML Project DocsDocument45 pagesML Project DocsNaresha aNo ratings yet
- Classify Webcam Images Using Deep LearningDocument17 pagesClassify Webcam Images Using Deep LearninggauravNo ratings yet
- DPV ProjectDocument65 pagesDPV Projectvamshi AkaramNo ratings yet
- Deep Learning Unit 2Document30 pagesDeep Learning Unit 2Aditya Pratap SinghNo ratings yet