You might also like
- Design and Analysis of Hydraulic Arm With GripperDocument6 pagesDesign and Analysis of Hydraulic Arm With GripperIJRASETPublicationsNo ratings yet
- Design and Analysis of 22 Ton Class Excavator Swing Braking SystemDocument6 pagesDesign and Analysis of 22 Ton Class Excavator Swing Braking SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Machine DesignDocument14 pagesMachine DesignSirajuddin A100% (1)
- Structural Optimization of Mini Hydraulic Backhoe ExcavatorDocument14 pagesStructural Optimization of Mini Hydraulic Backhoe Excavatormanjunath k sNo ratings yet
- Design and Development of 3-Way Dropping DumperDocument10 pagesDesign and Development of 3-Way Dropping Dumperlaukik_rautNo ratings yet
- Self-launching erection machines for precast concrete bridgesDocument22 pagesSelf-launching erection machines for precast concrete bridgespvmoorthiNo ratings yet
- Earth Moving EquipmentDocument24 pagesEarth Moving EquipmenthjgyyNo ratings yet
- Traction CalculationsDocument2 pagesTraction CalculationsChirdeNo ratings yet
- Design of Mine Shaft ElevatorDocument4 pagesDesign of Mine Shaft ElevatorfreddyNo ratings yet
- Design Principles - ExcavatorsDocument2 pagesDesign Principles - ExcavatorsalfavectorNo ratings yet
- Specifications Goliath CranesDocument8 pagesSpecifications Goliath CranesarvindkaushikNo ratings yet
- Gosan - Barrel Coupling - AGBSDocument7 pagesGosan - Barrel Coupling - AGBSAndré RosolemNo ratings yet
- Synthetic Slings PDFDocument3 pagesSynthetic Slings PDFNeemo FishNo ratings yet
- 400te Linear WinchDocument2 pages400te Linear Winchjohariak100% (1)
- GeoGrip EDocument4 pagesGeoGrip EBaggerkingNo ratings yet
- Unbalanced Vane Pump Design ExplainedDocument5 pagesUnbalanced Vane Pump Design ExplainedRaghu KrishnanNo ratings yet
- Zhao (2020) - Research On Jib Performance of Crane in Hoisting Wind GeneratorDocument9 pagesZhao (2020) - Research On Jib Performance of Crane in Hoisting Wind GeneratorGogyNo ratings yet
- Appendix 1 - Technical SpecificationDocument113 pagesAppendix 1 - Technical Specificationdsn_sarmaNo ratings yet
- Berco Complete Track Systems GuideDocument16 pagesBerco Complete Track Systems GuideBaggerkingNo ratings yet
- Transportation Engineering: Rail Spacing and Sleeper TypesDocument30 pagesTransportation Engineering: Rail Spacing and Sleeper Typesyousaf khanNo ratings yet
- Qian (2017) - Modeling and Analysis of Outrigger Reaction Forces of Hydraulic Mobile CraneDocument7 pagesQian (2017) - Modeling and Analysis of Outrigger Reaction Forces of Hydraulic Mobile CraneGogyNo ratings yet
- Uromac T-Rail 18 SV - BrochureDocument2 pagesUromac T-Rail 18 SV - BrochureCristiano RonaldoNo ratings yet
- Estimating Maintenance Costs For Mixed High-Speed Passenger and Freight Rail CorridorsDocument3 pagesEstimating Maintenance Costs For Mixed High-Speed Passenger and Freight Rail CorridorsArseneNo ratings yet
- Design and Analysis of Helical Gear With Different Materials by Using Pro/E and AnsysDocument7 pagesDesign and Analysis of Helical Gear With Different Materials by Using Pro/E and AnsysEditor IJTSRDNo ratings yet
- PT32 09 PDFDocument3 pagesPT32 09 PDFGrandhi Venkata Satya KiranNo ratings yet
- BECHEM Mobile Lifting Earth Moving Machines 2019 en 03Document11 pagesBECHEM Mobile Lifting Earth Moving Machines 2019 en 03Sergey MedvedevNo ratings yet
- Gravity Gradient Boom DesignDocument60 pagesGravity Gradient Boom Designapi-3758282No ratings yet
- Rated Loads For Lattice - and Telescopic-Boom CranesDocument7 pagesRated Loads For Lattice - and Telescopic-Boom CranesAmirsham SamerNo ratings yet
- Swing Check Valve (DN350) Meson 305072 PDFDocument1 pageSwing Check Valve (DN350) Meson 305072 PDFKunal KapoorNo ratings yet
- 12o Ton TelescopicDocument1 page12o Ton TelescopicmohamedNo ratings yet
- ASC SpecificationsDocument6 pagesASC SpecificationsChan Sek YeongNo ratings yet
- Method For Combining Valves With Symmetric and Asymmetric Cylinders For Hydraulic Systems PDFDocument15 pagesMethod For Combining Valves With Symmetric and Asymmetric Cylinders For Hydraulic Systems PDFRichard De Medeiros CastroNo ratings yet
- High-Performance Ship Unloaders: The Digger Crane SystemDocument16 pagesHigh-Performance Ship Unloaders: The Digger Crane SystemLeonardo CanditoNo ratings yet
- Lebus BulletinDocument4 pagesLebus BulletinNaval2014DNNo ratings yet
- TGN 11 Clip Spacing 09-12Document2 pagesTGN 11 Clip Spacing 09-12kayakeras3335No ratings yet
- Buckling Análysis of Telescopic Boom PDFDocument7 pagesBuckling Análysis of Telescopic Boom PDFAndonny Daq DelgadoNo ratings yet
- Crane Accidents and Emergencies Causes, Repairs, and PreventionDocument16 pagesCrane Accidents and Emergencies Causes, Repairs, and PreventionPablo Valenzuela ArredondoNo ratings yet
- Stress Analysis of Tractor Trolley Chassis With Effect of Various Thickness and Design Optimization For Weight Reduction Ijariie1894Document7 pagesStress Analysis of Tractor Trolley Chassis With Effect of Various Thickness and Design Optimization For Weight Reduction Ijariie1894anil sajjanarNo ratings yet
- Anchor Bolt Design Per ACI-318-11 Crane Beam DesignDocument3 pagesAnchor Bolt Design Per ACI-318-11 Crane Beam DesignJenny Cecilia Ureña ZuriNo ratings yet
- J Tws 2014 09 009 PDFDocument9 pagesJ Tws 2014 09 009 PDFHisham SyedNo ratings yet
- DNFT A-6348 Led-Ps PDFDocument4 pagesDNFT A-6348 Led-Ps PDFhugoheloNo ratings yet
- Mining Assignment 2Document10 pagesMining Assignment 2Anu UjinNo ratings yet
- Design and Development of Telescopic Con PDFDocument3 pagesDesign and Development of Telescopic Con PDFregi friyadaNo ratings yet
- 8 Rope Reeving 3 PDFDocument4 pages8 Rope Reeving 3 PDFsanjay aNo ratings yet
- Ace CraneDocument6 pagesAce CranensriitmNo ratings yet
- Hydraulics Accumulator FunctionDocument4 pagesHydraulics Accumulator FunctionmacebokNo ratings yet
- 1 HBS HydraulicValvesDocument29 pages1 HBS HydraulicValvesXavierGonzalezNo ratings yet
- Wire Rope DesignationDocument4 pagesWire Rope DesignationResshille Ann T. SalleyNo ratings yet
- Goliath CraneDocument2 pagesGoliath CraneZankar R ParikhNo ratings yet
- IADC/SPE 87158 Taut Leg Moorings Using Polyester and VLA AnchorsDocument6 pagesIADC/SPE 87158 Taut Leg Moorings Using Polyester and VLA AnchorsmsmsoftNo ratings yet
- Glass Fiber Reinforced Concrete ThesisDocument7 pagesGlass Fiber Reinforced Concrete ThesisMelinda Watson100% (1)
- Analysing Winch Systems With Finite Element AnalysisDocument5 pagesAnalysing Winch Systems With Finite Element AnalysisBen RuffellNo ratings yet
- 26105F Spec BrochureDocument5 pages26105F Spec Brochureابومحمد نايفNo ratings yet
- Gear HardnessDocument1 pageGear HardnessSubbarayan SaravanakumarNo ratings yet
- Projectreport ExcavatorArmDocument41 pagesProjectreport ExcavatorArmVinod Yb0% (1)
- Design and Optimation of Arm ExcavatorDocument6 pagesDesign and Optimation of Arm Excavatoranon_664850107No ratings yet
- 059 066Document8 pages059 066Mustafa KocNo ratings yet
- Development of An Improved Hydraulic Bearing Pusher and RemoverDocument5 pagesDevelopment of An Improved Hydraulic Bearing Pusher and RemoverInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Mini Excavator Design and AnalysisDocument9 pagesMini Excavator Design and AnalysisInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Excavator Cylinder Seal Safety and MaintenanceDocument1 pageExcavator Cylinder Seal Safety and MaintenanceShiee ShieeNo ratings yet
- Index: SK200 SK210Document3 pagesIndex: SK200 SK210Shiee ShieeNo ratings yet
- An Expert System For Engine Excavator Troubleshooting: January 2020Document10 pagesAn Expert System For Engine Excavator Troubleshooting: January 2020Shiee ShieeNo ratings yet
- Coordinated Motion Control and Force Feedback for Hydraulic ExcavatorsDocument9 pagesCoordinated Motion Control and Force Feedback for Hydraulic ExcavatorsShiee ShieeNo ratings yet
- UntitledDocument13 pagesUntitledShiee ShieeNo ratings yet
- MessageDocument2 pagesMessageShiee ShieeNo ratings yet
- Guidelines for Uploading Signature & Photo (4.5cm × 3.5cmDocument2 pagesGuidelines for Uploading Signature & Photo (4.5cm × 3.5cmMohanKumarNo ratings yet
- Railway Recruitment Board, Gorakhpur: Website: WWW - Rrbgkp.gov - in Phone No. & Fax 0551-2201209Document3 pagesRailway Recruitment Board, Gorakhpur: Website: WWW - Rrbgkp.gov - in Phone No. & Fax 0551-2201209Shiee ShieeNo ratings yet
- Railway Recruitment Board, Gorakhpur: Website: WWW - Rrbgkp.gov - in Phone No. & Fax 0551-2201209Document3 pagesRailway Recruitment Board, Gorakhpur: Website: WWW - Rrbgkp.gov - in Phone No. & Fax 0551-2201209Shiee ShieeNo ratings yet
- Jsyos HKRHZ CKSMZ) JK¡PH HKKJR LJDKJ) Jsy Ea Kky : Panel For The Post of Alp/Technician Against Cen No. 01/2018Document2 pagesJsyos HKRHZ CKSMZ) JK¡PH HKKJR LJDKJ) Jsy Ea Kky : Panel For The Post of Alp/Technician Against Cen No. 01/2018Shiee ShieeNo ratings yet
- Nursing Process & Patient Care ModalitiesDocument6 pagesNursing Process & Patient Care ModalitiesNur SanaaniNo ratings yet
- Kent Thiry IndictmentDocument10 pagesKent Thiry IndictmentMichael_Roberts2019No ratings yet
- CV HannahDocument3 pagesCV HannahRoxan DosdosNo ratings yet
- 100-Word Replacement PDFDocument14 pages100-Word Replacement PDFTheodore Vijay100% (1)
- Dell in India Targeting SMB Markets - The Differentiation Strategy PDFDocument16 pagesDell in India Targeting SMB Markets - The Differentiation Strategy PDFJatinNo ratings yet
- ACCT250-Auditing Course OutlineDocument7 pagesACCT250-Auditing Course OutlineammadNo ratings yet
- The Oz DietDocument5 pagesThe Oz Dietkaren_wilkesNo ratings yet
- Prompt 2022Document12 pagesPrompt 2022cecilferrosNo ratings yet
- Create Sales Order (Bapi - Salesorder - Createfromdat2) With Bapi Extension2Document5 pagesCreate Sales Order (Bapi - Salesorder - Createfromdat2) With Bapi Extension2raky03690% (1)
- Window On The Wetlands BrochureDocument2 pagesWindow On The Wetlands BrochureliquidityNo ratings yet
- Touch TypingDocument49 pagesTouch TypingCris Tin100% (2)
- Bruce MoenDocument4 pagesBruce MoenGeorge Stefanakos100% (5)
- Edited General English Question Paper Part 1Document12 pagesEdited General English Question Paper Part 1Utkarsh R MishraNo ratings yet
- Joyce2016 PDFDocument13 pagesJoyce2016 PDFAffan ArrizqiNo ratings yet
- Flex Id Driver Install InstructionsDocument24 pagesFlex Id Driver Install InstructionskingdiamondNo ratings yet
- Lesson Plans by Noman Niaz MaharDocument3 pagesLesson Plans by Noman Niaz MaharNoman Niaz 13No ratings yet
- ISL201-Solved MCQs 100 - Correct For Mid Term Papers (WWW - Virtualstudysolutions.blogspot - Com)Document70 pagesISL201-Solved MCQs 100 - Correct For Mid Term Papers (WWW - Virtualstudysolutions.blogspot - Com)bc190200669 BUSHRANo ratings yet
- Midterm Exam Report Python code Fibonacci sequenceDocument2 pagesMidterm Exam Report Python code Fibonacci sequenceDim DimasNo ratings yet
- Policy - SIM Cards Point of Sale Registration EngDocument6 pagesPolicy - SIM Cards Point of Sale Registration EngSHALOM SHUMBANo ratings yet
- Anne Frank Halloween Costume 2Document5 pagesAnne Frank Halloween Costume 2ive14_No ratings yet
- Labor Law 1 Class NotesDocument20 pagesLabor Law 1 Class Notescmv mendozaNo ratings yet
- CAPITAL ALLOWANCE - Exercise 3 (May2021)Document2 pagesCAPITAL ALLOWANCE - Exercise 3 (May2021)NORHAYATI SULAIMANNo ratings yet
- Packex IndiaDocument12 pagesPackex IndiaSam DanNo ratings yet
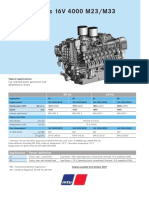
- Diesel Engines 16V 4000 M23/M33: 50 HZ 60 HZDocument2 pagesDiesel Engines 16V 4000 M23/M33: 50 HZ 60 HZAlberto100% (1)
- NEW HOLLAND - Trucks, Tractor & Forklift Manual PDDocument14 pagesNEW HOLLAND - Trucks, Tractor & Forklift Manual PDAjjaakka0% (2)
- Fishblade RPGDocument1 pageFishblade RPGthe_doom_dudeNo ratings yet
- PT JayatamaDocument67 pagesPT JayatamaAminadap. SIL.TNo ratings yet
- Jumpin' Beans Cafe Near SchoolDocument4 pagesJumpin' Beans Cafe Near SchoolJhon Axl Heart RaferNo ratings yet
- EASE Module 1 Geometric RelationsDocument26 pagesEASE Module 1 Geometric RelationsMarlon MiclatNo ratings yet
- Ky203817 PSRPT 2022-05-17 14.39.33Document8 pagesKy203817 PSRPT 2022-05-17 14.39.33Thuy AnhNo ratings yet
- Certified Solidworks Professional Advanced Weldments Exam PreparationFrom EverandCertified Solidworks Professional Advanced Weldments Exam PreparationRating: 5 out of 5 stars5/5 (1)
- FreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsFrom EverandFreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsRating: 5 out of 5 stars5/5 (1)
- Autodesk Inventor | Step by Step: CAD Design and FEM Simulation with Autodesk Inventor for BeginnersFrom EverandAutodesk Inventor | Step by Step: CAD Design and FEM Simulation with Autodesk Inventor for BeginnersNo ratings yet
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchFrom EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchRating: 4 out of 5 stars4/5 (10)
- From Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsFrom EverandFrom Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsNo ratings yet
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)From EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Rating: 5 out of 5 stars5/5 (2)
- Certified Solidworks Professional Advanced Surface Modeling Exam PreparationFrom EverandCertified Solidworks Professional Advanced Surface Modeling Exam PreparationRating: 5 out of 5 stars5/5 (1)
- Fusion 360 | Step by Step: CAD Design, FEM Simulation & CAM for Beginners.From EverandFusion 360 | Step by Step: CAD Design, FEM Simulation & CAM for Beginners.No ratings yet
- Contactless Vital Signs MonitoringFrom EverandContactless Vital Signs MonitoringWenjin WangNo ratings yet
- Beginning AutoCAD® 2020 Exercise WorkbookFrom EverandBeginning AutoCAD® 2020 Exercise WorkbookRating: 2.5 out of 5 stars2.5/5 (3)
- FreeCAD | Design Projects: Design advanced CAD models step by stepFrom EverandFreeCAD | Design Projects: Design advanced CAD models step by stepRating: 5 out of 5 stars5/5 (1)