Professional Documents
Culture Documents
Materi Persamaan Diferensial Biasa
Materi Persamaan Diferensial Biasa
Uploaded by
Jana Iska0 ratings0% found this document useful (0 votes)
13 views40 pagesOriginal Title
Materi Persamaan diferensial biasa(1)
Copyright
© © All Rights Reserved
Available Formats
PDF or read online from Scribd
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
© All Rights Reserved
Available Formats
Download as PDF or read online from Scribd
0 ratings0% found this document useful (0 votes)
13 views40 pagesMateri Persamaan Diferensial Biasa
Materi Persamaan Diferensial Biasa
Uploaded by
Jana IskaCopyright:
© All Rights Reserved
Available Formats
Download as PDF or read online from Scribd
You are on page 1of 40
BAB 2
PERSAMAAN DIFERENSIAL BIASA
Persamaan diferensial (PD) adalah salah satu metode yang sangat penting dalam
pemodelan matematis dari berbagai fenomena. Persamaan diferensial merupakan
suatu cara untuk menyatakan berbagai gejala, baik dalam kaitannya dengan ilmu
pengetahuan maupun dengan gejala alam dan sosial. Berbagai fenomena dalam
jimu fisika, kimia, biologi, ekonomi, dan teknik dapat dimodelkan dengan
persamaan diferensial.
Pada bab ini akan dibahas beberapa metode penyelesaian persamaan diferensial
biasa (Ordinary Differential Equation / ODE), seperti metode euler, metode verlet,
metode runge-kutta, dan metode adaptif, yang akan diaplikasikan pada solusi
masalah fisika seperti: gerak peluru (projectile motion), bandul (pendulum), gerak
orbit planet, dan model lorenz untuk cuaca
Pada Fisika Dasar telah dipelajari gerak peluru dengan menggunakan kinematika
sederhana di mana pengaruh gesekan/hambatan udara diabaikan. Pada bab ini
pengaruh gesekan, misainya ketika bola tenis dilemparkan, akan diperhitungkan.
Persoalan bandul pada fisika dasor selalu dianalisis dengan menganggap bahwa
sudut simpangan cukup kecil sehingga sin(0) = @. Pada bagian ini anggapan
tidak akan diberlakukan, Gerak orbit planet yang berbentuk elips akan disimulasi
‘melalui persamaan diferensial, Demikian pula hanya dengan model cuaca dari
Lorenz yang membuittikan bahwa cuaca pada hakikatnya sulit diprediksi karena
sifatnya yang chaos.
2.1 MODEL PERSAMAAN DIFERENSIAL BIASA (ODE)
Persamaan diferensial biasa (Ordinary Differential Equation / ODE) adalah
persamaan diferensial yang melibatkan satu variabel, pada umumnya waktu (time) t
pada problema fisika. Ada tiga bentuk ODE yang sering dijumpai dalam problema
fisika, yaitu:
1. Persamaan Peluruhan (Decay)
wy
=0 = at);
a“? = Y = Yo exp(-at);
(2.1)
@ Dipindai dengan CamScanner
a
46 FisikKA KOMPUTASI SOLUS! PROBLEMA FiSIKA DENGAN Matug
2. Persamaan Pertumbuhan (Growth):
dy
a= 0 => y = Yo exp(+at); (2.2)
3. Persamaan Osilasi (Oscillation):
4 :
Fe ley = 0 = y = yo explFiot): 3
Persamaan diferensial berorde lebih tinggi biasanya ditransformasi ke bentuk orde
1. Misalnya persamaan orde-2 berikut ini:
a’y dy
moa 7M ay = 0 (24)
ate 7 dt ny )
ditransformasi dengan subsitusi v = dy/dt, schingga diperoleh:
dv Ul K
—+—vt—y=0; (2.5)
dt m m> e
dan
dy
—-v=0 4
dt ea
sebagai sistem persamaan diferensial biasa ber-orde-1. Pada persamaan di atas,
7), K, ©, dan m adalah tetapan atau parameter fisis.
Suatu sistem persamaan diferensial bias
Komponen (variabel) dapat dituliskan dal:
sebagai berikut:
‘a berorde-1 yang terdiri atas n buah
lam bentuk vektor persamaan diferensl
dy
+ f(t,y) = 0 2n
at (t,y) c
atau dalam format:
dy
— = f(t, y); (28)
ai (ty)
atau y’ = f(ty).
di mana y dan f adalah vektor dengan n komponen,
@ Dipindai dengan CamScanner
PERSAMAAN DIFERENSIAL BIASA 47
Berbagai metode analitik diperkenalkan dalam matematika untuk menyelesaikan
persamaan diferensial biasa. Namun demikian dalam buku ini diberikan solusi
dalam bentuk numerik di mana hasilnya disimulasikan dengan grafik.
2.2 GERAK PELURU
Andaikan sebuah bola tenis dilemparkan, maka gerakannya dapat dijelaskan
dengan cara menghitung vektor posisi bola r() dan vektor kecepatan bola v(t) pada
waktu t. Persamaan gerak peluru dapat ditulskan sebagai sistem PD-orde-1 berikut
ini:
dv_ Fr - roe
&_ RO, Eas 29)
dt m dt
di mana m : massa bola tenis
Fa(y}: gaya penghambat udara, yang bergantung pada kecepatan bola v
@: percepatan gravitasi setempat
Persamaan diferensial (2.9) menyatakan percepatan dan kecepatan bola.
Ketika bola melayang maka terjadi hambatan udara yang bisa memperlambat laju
bola. Hambatan ini akan semakin besar bila bola bergerak lebih cepat atau
permukaan bola lebih luas. Persamaan dari gaya hambatan udara ini biasa
ater
FE hay
settee
aa
bet
ene!
15
Waktu t
Bandul Sedormana
wat
teh,
tH
57
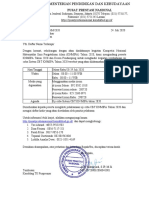
Gambar 2.2 - Osilasi bandul dengan @ = 10 dan h = 0.01
Berikut ini adalah contoh untuk sudut awal besar = 150 derajat dengan h=0.1
Masukkan simpangan sudul awal - 150
Masukkan nilai time step h - 0.1
Titik balik pada t = 2.800000
Titik balik pada t = 8.300000
Titik balik pada t = 13.800000
Titik balik pada t = 19.400000
Titik balik pada t = 24.900000
Perioda Rata-rata bandul = 11.05 +/- 0.05
@ Dipindai dengan CamScanner
FisikA KOMPUTASI SOLUS! PROBLEMA FisiKa DENGay My
My
Bandul Sederhana
Gamabr 2.3 - Osilasi bandul dengan @ = 150 dan h = 0.1
2.4 OrpiT KOMET/PLANET
Hukum Gravitasi (Gravitational Law} Newt
sangat fundamental dalam iknu fisika yang menjelackan
bila ada dua massa, masing-masing m dan M, berada jarale
interaksi antara keduanya sebesar: 1 maka ada gaya
67 x 10-11 m3 Kg. 52
m, M = massa benda (Ka)
jarak antara kedua benda (m)
Planet, termasuk bumi, bintang, komet, dan semua
hukum gravitasi, walaupun hukum ini kemudian dir
dengan memasukkan unsur relatvitas
benda angkasa_ men,
evisi oleh Albert Einstein
Gerak planet telah diamati berabodabad yang laiu. Salah satu p
terkenal adalah Copemicus yang kemudian menyimpulkan bahwa planermet yang
bergerak mengitari matahari. Kemudian Tycho Brahe melakukan Pengulen
pencatatan atas posisi planet-planet tersebut di anghasa dari wakty ke wake.
Setelah Tycho Brahe meninggal, Kepler, seorang matematisi, men,
'9analsis data
yang telah diumpulkan oleh Brahe, kemudian menyimpulkan babu orig pe
@ Dipindai dengan CamScanner
PERSAMAAN DIFERENSIAL BIASA 59
planet tersebut adalah ellips. Kepler kemudian mengemukakan tiga buah hukum,
vyaitu:
1. Setiap planet yang mengorbit matahari memiliki lintasan ellips di mana
‘matahari berada pada salah satu fokus-nya.
2. Vektor radius dari matahari ke planet yang mengorbit akan menyapu
Juasan yang sama pada interval waktu yang sama.
3. Kuadrat dari periode (waktu edar) dari dua planet berbanding langsung
dengan pangkat tiga dari orbit mereka.
Berikut ini adalah analisis fisis sederhana dari gerak orbit planet. Andaikanlah
sebuah komet mengitari matahari. Dimensi yang digunakan adalah dimensi ruang
angkasa di mana jarak diukur dengan satuan AU (Astronomical Unit di mana 1
AU = 1.496 x 10!1 m, dan satuan waktu adalah tahun (year). Massa matahari
Mr1.99 x 10% kg, massa komet m anggaplah = 1. Pada sistem ini hasil kali GM =
4? AUS /yr?.
Persamaan gerak dapat diturunkan dari persamaan energi, yaitu sebagai berikut:
(2.34)
di samping itu bila orbitnya melingkar maka gaya sentripetal akan seimbang
dengan gaya gravitasinya, schingga:
my? _GMm (2.35)
ror
atau:
v=VGM/r (2.36)
Subsitusi (2.36) ke (2.34) memberikan energi orbit adalah:
GMm (2.37)
E=-
2r
Bila lintasan adalah ellips maka r dapat diganti dengan a = radius terpanjang dari
clips, sehingga persamaan (2.37) menjadi:
(2.38)
(2.39)
@ Dipindai dengan CamScanner
60
Fisika KoMPUTAS! SOLUS! PROBLEMA FISIKA DENGAN Matuy
Dengan menggunakan kekekalan momentum maka diperoleh periode orbit;
Cay
yang membuktikan hukum Kepler ke-3.
ORBIT PLANET DENGAN METODE EULER
it st mengelilingi matahari
Pertama untuk memberi kesan tentang orbit plane! =
pavenean geeky diselesaikan dengan metode euler. Persamaan gerak (2.19
‘dengan metode euler disclesaikan sebagai berikut:
vt +h) =i) +h * afr, v)
rt +h)= rt) +h * vi)
di mana untuk orbit planet:
afe.v) =~ GM*r / [113
Sebagai nilai awal dapat dimasukkan 1(0), (0) serta nila time-step h. Langkah
langkeh penyelesainnya adalah sbb:
1. Masukkan nila’ awal : 1(0), 40),
2. Tetapkan GM=4n2 dan m=1
3. Lakukan perulangan (misalnya hingga 200 kali)
4. Gambar grafik:
a. polar(wplot, rplot)
6. plotitplot, kinetik, tplot, potensial
ee
@ Dipindai dengan CamScanner
PERSAMAAN DIFERENSIAL BIASA 64,
Program MATLAB orbit-planet dengan metode euler tersebut di atas adalah sbb:
torbitE ~ program untuk menggambarkan orbit planet
& dengan metode Euler
clear; help orbitE
r0 = input('Masukkan posisi awal dalam AU - ');
vO = input ('Masukkan kecepatan awal dalam AU/thn - ');
h = input('Masukkan nilai time-step dalam thn - ');
r= [r0 01; ‘tvektor posisi
v = [0 v0]; %vektor kecepatan
GM = 4*pi*2; %tetapan GM dalam satuan AU
mel
time
stepmax = 200;
for i=1:stepmax
rplot (i) = norm(r);
wplot(i) = atan2(r(2), r(1));
tplot (i) = time;
kinetik(i) = 0.5*m*norm(v) *2;
potensial(i) = -GM*m/norm(r);
-GM*r/norm(r) *3;
x + htv;
vi + h*a;
time = time + h;
end
subplot (121)
polar(wplot, rplot, ‘+')
grid
ylabel('Posisi (AU)')
title('Gerak Orbit')
subplot (122)
Etotal = kinetik + potensial;
plot (tplot,kinetik,'-.', tplot,potensial, '--'
tplot, total, '-')
xlabel (‘Waktu (thn) ')
ylabel('Energi')
title('EK(dot) EP(dash) ETot (solid) ')
subplot (111)
@ Dipindai dengan CamScanner
_,
62 FisikA KOMPUTAS! SOLUS! PROBLEMA FISIKA Dengan, Matug
» orbitE
orbitE - program untuk menggambarkan orbit planet
dengan metode euler
Masukkan posisi awal dalam AU - 1
Masukkan kecepatan awal dalam AU/thn - 2*pi
Masukkan nilai time-step dalam thn - 0.02
Hasiinya dapat dilthat pada gambar berikut. Kesimpulan metode euler tidak terlay
Presisi sehingga orbit tidak berbentuk tetapi berbentuk spiral. Ini akibat dari total
energi yang tidak konstan tetapi berfambah. Seandainya planet mengikuti orbit in
berarti semakin lama akan semakin jauh dari matahari dan tidak akan kembali lagi
ke sekitar matahari.
Metode euler dapat dimodifikas
i dengan metode euler-cromer, yaitu. persamaan
(2.5) sebagai berikut:
Vast = Vy thtag
yet = tat Ape
di mana hasil vt+h) langsung digunakan
dimodifikasi dengan menukar tempat ai
Hasilnya bisa dilihat pada gambar beriku
untuk menghitung 1(t+h),
ntara r= r+ ht
itnya.
program orbitE
'v dengan v= v + hta.
@ Dipindai dengan CamScanner
PERSAMAAN DIFERENSIAL BIASA, 63
EK(dot) EP(dash) ETot(solic)
Gerak Orbit 20)
‘Waktu (thn)
Gambar 2.4 - Gerak Orbit dengan Metode Euler
(ORBIT PLANET DENGAN METODE EULER-CROMER
Karena metode euler gagal dalam memprediksi orbit planet maka berikutnya akan
dicoba mencari solusi orbit planet ini dengan metode euler-cromer.
Pada metode ini komputasi kecepatan (v) didahulukan, di mana komputasi lintasan
() dilakukan setelah komputasi kecepatan.
forbitEC - program untuk menggambarkan orbit
planet
% dengan metode Euler-Cromer
clear; help orbitEC
r0 = input('Masukkan posisi awal dalam AU - ')
vO = input('Masukkan kecepatan awal dalam AU/thn
h = input('Masukkan nilai time-step dalam thn -
"ys
r= [y0 0); Svektur posisi
v= [0 v0]; %vektor kecepatan
@ Dipindai dengan CamScanner
64 Fisika KOMPUTASI SOLUS! PROBLEMA Fisika DENA
aainnianial My,
m= 1;
time = 0
stepmax = 200;
for i=1:stepmax
rplot(i) = norm(r);
wplot (i) = atan2(r(2), r(1))i
tplot(i) = time;
kinetik(i) = 0.5*m*norm(v) %2;
potensial(i) = -GM*m/norm(r);
a = -GM*r/norm(r)%3;
v=v+ hta;
rer + h*v;
time = time + h;
end
subplot (121)
polar(wplot, rplot, '+')
grid
ylabel('Posisi (AU) ')
title('Gerak Orbit')
subplot (122)
Etotal = kinetik + potensial;
plot(tplot,kinetik,'-.', tplot,potensial,'--',
tplot, Etotal,'-')
xlabel('Waktu (thn) ')
ylabel ('Energi')
title('EK(dot) EP(dash) ETot (solid) 3)
subplot (111)
@ Dipindai dengan CamScanner
PERSAMAAN DIFERENSIAL BIASA
atin roecrone tse
30)
Gerak Orbit Oe es a
9 2
Waktu (thn)
‘Gambar 2.5 - Gerak Orbit dengan metode euler-cromer
Apabila program euler-cromer ini dijalankan dengan data masukan posisi awal r0 =
1, kecepatan awal v0 = 2*pi, dan h = 0.02, temyata lintasan yang dihasilkan
adalah lingkaran seperti tampak pada gambar di atas.
Namun untuk kasus di mana kecepatan sudut awal lebih rendah temyata metode
‘euler-cromer juga gagal, Karena memberikan lintasan garis bukan ellips. Perhatikan
hasilnya berikut ini:
» orbitBC
orbitEC - program untuk menggambarkan orbit planet
dengan metode euler-cromer
Masukkan posisi awal dalam AU - 1
Masukkan kecepatan awal dalam AU/thn - pi
Masukkan nilai time-step dalam thn - 0.02
@ Dipindai dengan CamScanner
FisIKA KOMPUTAS! SOLUS! PROBLEMA FISIKA DENGAN Mat
66 isi
EK (dot) EP(dash) ETot(soligy
Gerak Orbit
Diperlukan suatu metode penyelosaiay
agar dapat diperoleh bentul lin
N persat
tasan planet yang lebih balk,
maan diferensial yang lebih akurl
Runge-kutta order-2
* Runge-kutta orde-d
Runge-hutta fehiberg orde-45
Runge-kutta adaptif
@ Dipindai dengan CamScanner
PERSAMAAN DIFERENSIAL Bisa
67
Peat ae a |
RUNGE-KUTTA OrDE-2
Formula dari runge-kutta orde-2 adalah sbb:
x(t+h) = x(Q) + Ye KI + Ke) (2.41)
di mana: Kl=h* f(t, x(t))
K2=h* f(t+h, x(t}+h*K1)
‘Langkah Pemrograman dapat dilakukan sbb:
* hitungK1 =h* f(t, xit))
. xtemp = x(t) + h*K1
= ttemp =t+h
K2 = hMittemp, xtemp)
x(tth) = x(t) + (K1 + K2) /2
Masukkan langkah ini ke dalam baris Program OrbitE menggantikan r dan v, hasil
dari program dengan runge-kutta orde-2, dengan rilai awal r= 1, v= pi h = 0.05
adalah sbb:
EK(do!) EP (dash) ETot(solid)
300
a
100!
| j \
2 3
31 :
100
enor 05 1
Waka (tha)
Gambar 2.7 - Hasil Orbit Planet dengan metode runge-kutta orde-2, vO=1
@ Dipindai dengan CamScanner
if
68 FisIKA KOMPUTAS! SOLUS! PROBLEMA Fisika DENG, AN My
Terlihat bahwa orbit planet baru mendekati ellips. Walaupun didanding y
hasil euler-cromer sudah lebih baik, namun belum memuaskan. eng,
METODE RUNGE-KUTTA ORDE-4
Formula dari metode runge-kutta orde-4 adalah sebagai berikut:
x(tth) = x() + h*(K1 + 2*K2 + 2*K3 + K4) /6 ee
di mana:
K1 = f(t.)
K2={(t+ ¥h,x+%h Kl)
K3= (t+ ¥eh, x + ¥eh K2)
K4= f(t +h, x +h K3)
Langkah pemrograman dapat dilakukan sebagai berikut:
hitung K1 = f(t, h)
hper2 = h/2
tper2 =t + h/2
xtemp = x + hper2*K1
K2= fitper2, xtemp)
xtemp = x + hper2*K2
K3 = fitper2, xtemp)
tplush = t +h
xtemp = x +h*K3
K4 = {(tplush, xtemp)
xplus =x +h"(K] + 2*K2 + 2*K3 + K4y/6
Fungsi RK berikut ini adalah implementasi metode runge-kutta orde-4.
atlas Cee
function xnew RK4 (x, t, h, derivRK, param)
% metode Runge-Kutta orde-4
& x = vektor variabel dependen x(t)
% t = varibel independen (waktuy
% h = step size | agi
* derivRK fungsi yang memberikan ruas kanan dari 4x/
% param = parameter ekstra
% xnew nilai x(t+h)
hper2 = 0.5*h;
Kl = feval (derivrx, x tb
thper2 = t + hper2;
xtemp = x + hper2*k1;
» Param);
at
@ Dipindai dengan CamScanner
eee
69
feNSIAL BIAS
AAN DIFER
persAM!
i{(derivRk, xtemp, thper2, param);
fe *K2;
ey + hper2*K2; : a
xtemP © ai(derivRK, xtemp, thper2, param);
evi
coe ey
xtemP © aliderivRK, xtemp, tplush, param) ;
Ke eee + WY (KL + 2.°K2 + 2.*K3 + Ka) /6
ynew =
return,
Progam OrbitRK4 adalah program persamaan gerak orbit planet yang
‘memanfaatkan fungsi RK4 adalah sbb:
SorbitRK4 - program untuk menggambarkan orbit planet
$ dengan metode Runge-Kutta orde-2
clear; help orbitRK4
ro
input (‘Masukkan posisi awal dalam AU - ');
vO = input(‘Masukkan kecepatan awal dalam AU/thn - *)
h = input ('Masukkan nilai time-step dalam thn -
r= [x00]; &vektor posisi
v = (0 v0]; %vektor kecepatan
GM = 4*pi~
m=;
time = 0
stepmax = 200;
state = (r(1) r(2) v(1) v(2)];
for is1:stepmax
xplot(i) = norm(r);
wplot(i) = atan2(r(2), r(1));
tplot(i) = time;
Kinetik(i) = 0.5*m*norm(v) 72;
Potensial(i) = -GM*m/norm(x) ;
State = RK4(state, time, h, ‘gerak', GM);
r= [state(1) state(2)];
Vv = [state(3) state(4)];
time = time + h;
end
Subplot (121)
Polar(wplot, rplot, '+')
grid
ylabel('Posisi (AU)')
Dipindai dengan CamScanner
FisikA KOMPUTAS! SoLus! PROBLEMA FIsikA DENGAN yy, Mug
70
title('Gerak orbit")
subplot (122) a
Etotal = kinetik + potensial: eee
plot (tplot,kinetik, '--'+ :
tplot,Etotal, '-')
xlabel (‘Waktu (thn) ')
ylabel ('Energi') a
title('EK(dot) EP(dash) ETot (solid) ')
subplot (111)
Persamaan gerak dituliskan dalam fungsi ‘gerak’ sebagai berikut:
function deriv = gerak(s, t, GM)
% vektor derivatif
(s(1) 5 (2)];
{s(3) s(4)];
-GM*r/norm(r)*3;
deriv = [v(1) v(2) a(1) a(2)];
return
Dengan parameter yang sama, 10 = 1 AU, vO = m AU/thn, dan h = 0.005 thn
diperoleh hasil sebagai berikut:
» orbitRK4
orbitRK4 - program untuk menggambarkan orbit planet
dengan metode runge-kutta orde-2
Masukkan posisi awal dalam AU - 1
Masukkan kecepatan awal dalam AU/thn - pi
Masukkan nilai time-step dalam thn - 0. 005"
@ Dipindai dengan CamScanner
4 DIFERENSIAL BIASA
inal
oo Oe
Gerak Orbit
Posisi (AU)
Energi
‘Waktu (thn)
Gambar 2.8 - Orbit Planet dengan metode munge-kutta orde-4, vO = x
Tetthat hasil yang lebih tepat di mana orbit planet sudah berbentuk ellis seperti
yang diharapkan.
METODE RUNGE-KUTTA ADAPTIF
Metode adaptif adalah metode di mana besarnya time-step h bisa diubah sesuai
dengan besamya error yang bisa diterima. Pada setiap langkah besarnya ener
diperkirakan dan apabila lebih besar dari batas yang diberikan maka h diper hat
misalnya h/2. Demikian seterusnya. Sebaliknya bila error jauh lebih kecil dari
Yang diberikan maka time-step h bisa diperbesar, misalnya 2h.
Proses adaptif dapat dilakukan sebagai berikut:
1. Gunakan time-step = h untuk menghitung x1 = x(t+h) ae
2 Gunakan time-step =h/2, untuk menghitung ee Fai ste
langkah karena hitung dulu x(t+h/2) kemudian dat
3. Selisih keduanya adalah error, E = x1 ~ 2.
4.
Tetapkan batas error, misalnya Eb.
Dipindai dengan CamScanner
72 FisIKA KOMPUTAS! SOLUS! PROBLEMA FISIKA DENGay Mw rg
il step bart gary = h
5. Error dari RK@ & h°, maka pemilihan time-step ars = b (Eb /ey4
Cara lain adalah dengan seleksi if E >= Eb maka h = h/2, else h = 25),
Berikut ini adalah fungsi ARK (Adaptive Runge-Kutta) dalam MATLAB:
function [x, t, h] = ARK(x,t,h,err,derivRK, param)
% fungsi Adaptive Runge-Kutta
% di-adopsi dari buku Alejandro R.Garcia, "Numeric,
Methods".
ts = t; ss
faktorl = 0.9;
stepmax = 100;
for i=1:stepmax
% hitung x(t+h) dua langkah dengan time-step h/2
hper2 = 0.5+h;
xtemp RK4(xs, ts, hper2, derivRK, param);
t = ts + hper2;
RK4(xtemp, t, hper2, derivRK, param);
tung x(t+h) satu langkah dengan time-step h
ts +h;
xtemp = RK4(xs, ts, h, GerivRK, param);
% hitung error (selisih)
scale = 0.5*(abs(x) + abs(xtemp))*err;
xbeda = x ~ xtemp;
errmax = max(abs(xbeda)./(scale + eps));
% bila errmax terlalu besar hitung hbaru
h_lama = h;
h = faktorl*h_lama*errmax*(-0.20);
% h tidak diperkecil lebih dari faktor2
h = max(h, h_lama/faktor2) ;
if errmax < 1
break;
end
end
h_= min(h, faktor2*h_lama);
xi
faktor2 =
uwn
x
&
t
Program untuk menyelesaikan gerak orbit planet dengan memanfaatkan "3S"
kutta adaptif adalah sbb:
eee eee
atl
@ Dipindai dengan CamScanner
it planet
am untuk menggambarkan orbit Pp
- prose ge-Kutta adaptive
qbitAK ~ Eengan metode Run
orbitARK i
(Masukkan posisi
input asukkan kecepatan a!
me tmasukkan nilai time-s
; evektor posisi
gvektor kecepatan
awal dalam AU - ')i
wal dalam AU/thn - ')i
input
tep dalam thn - ');
200;
state = [x(1) r(2) v(1) v(2)]i
err = 1.e-3;
for i=1:stepmax
rplot(i) = norm(r);
wplot (i) = atan2(r(2), ©(1));
tplot (i) = time;
kinetik(i) = 0.5*m*norm(v)*2;
Potensial(i) = -GM*m/norm(r) i
,__[state, time, h] = ARK(state, time, h, err,
gerak', GM) ;
Le {state(1) state(2)]i
{state(3) state(4) 1];
time = ti
a time + h;
Subplot (121)
Polar
Stig (plot, rplot, '+')
Ylabel (1 pogj
title ("Posisi (AU) ')
('Gerak it’
mbPloe (132) Orbit")
al =
Pl * kinetik ;
oe tplot-kinetik potensial
teEtotal,:1)
tplot potensial, ‘~~ :
abel
Manet Wake (hn) *)
Serer geneesi)
Meroe aii) EP(dash) ETot (solid) ")
@ Dipindai dengan CamScanner
74 FisikA KOMPUTAS! SOLUS! PROBLEMA FISIKA DENGay Ma
Program ini dicoba dengan posisi awal 1 AU, kecepatan sudut awal x/2
dan h=0,008, dengan hasil sebagai berikut:
» orbitARK
AU ite
orbitARK - program untuk menggambarkan orbit planet
dengan metode runge-kutta adaptif
Masultkan posisi awal dalam AU - 1
Masulkan kecepatan awal dalam AU/thn - pi/2
Masulkan nilai time-step dalam thn - 0.005
Grafik lintasan terlihat berbentuk ellips. Terlihat dalam gambar bahwa perulangan
'ebih banyak dilakukan pada posisi perihelion (dekat ke matahari) dari ada posi
aphelion.
EK(dot) EP(dash) ETot(sobd)
1500
1000
4
Dipindai dengan CamScanner
wo
MAAN DIFERENSIAL Gingell eet LE
95 MODEL CuaCA LORENZ
perabad-abad telah dipercaya bahwa berbagai fenomena fisis seperti cuaca
it iprediksi Karena variabel yang terkait di dalamnya sangat banyak.
se komputer modern berkapasitas besar dan berkecepatan tinggi
Fee merjaniikan bahwa tidak lama lagi fenomena alam dengan mudah
suttfmamaan. Pada awal tahun 60-an, seorang ahli metereologh dari MIT
sora EA Lorenz ingin membultikan bahwa tidak begity mudah melalaikan
frells gela cuaca, Karena sangat kompleks, dan sifat alam yang non-lnier
Lorenz membuat suatu model matematis dalam bentuk sistem persamaan
diaersal nonlinear, yang Kemudian disederhanakan menjadi 12 variabel. Pada
altima dapat diambil kesimpulan bahwa gejala cuaca tidak periodik dan sangat
bergentung pada kondisi awal.
Mode cuaca lorenz yang disederhanakan menjadi 3 variabel adalah sbb:
(2.43)
@ mana 6, r, dan b adalah tetapan posit, Persamaan (2.34) menggambarkan
Patt sistem persamaan diferensial untuk gerak konveksi dalam udara karena
feuarth ‘suhu, x menyatakan laju konveksi, y dan z menvatakan gradien
me Nilai parameter pada dasamya bergantung pada komposisi udara,
ving igen = 10, b = 8/3, dan r berbanding dengan gradien temperatur
Sis
alae Persamaan diferensial ini akan diselesaikan dengan metode runge-kutta
suaty (°° lprogram dalam MATLAB. Persamaan (2.34) dimasukkan dalam
"esi bemama PDLorenz, dan program penyelesaiannya adalah LORENZ.
Ten tt tt sae pala
fit Seriv = ppLorenz(a, time, param)
iferen ntUk mendefinisikan sistem persamaan
as yausial Lorenz
tine ktor(x y 2]
Darag 208k Gigunakan dalam fungsi
@erjy _ Parameter [rs b]
Xe aqqys Vektor (ax/at dy/at az/dt)
a i vea(2); z=a(3);
is = param(2); b = param(3)i
= at ly - x);
rex - YY - x*zZ;7
@ Dipindai dengan CamScanner
si
76 FisikA KOMPUTASI SOLUS! PROBLEMA Fisika, DENGay
My
deriv(3) = x*y - b*z:
% Lorenz - program komputasi persamaan Lorenz
8 menggunakan metode Runge-Kutta Adaptive
clear; help Lorenz;
state = input('Masukkan posisi awal [x y z]-+),
input ('Masukkan nilai parameter r -');
r=
s = 10; % parameter sigma
b = 8./3.;
param = [rs b];
h = 1; % nilai step-size awal
err = 1.e-3; % toleransi kesalahan
time=0;
stepmax = 300;
for i=1:stepmax
([state, time, h] = ARK(state, time, h, err,
*‘PDLorenz', param);
% = state(1); y=state(2); z=state(3);
tplot(i) = time;
hplot(i) = h;
xplot (i) = x;
yplot (i)
zplot (i)
if (xem(i, 10) < 1)
fprintf('Baru selesai %g persen \n', i/stepmax)i
end
end
% grafik time series
plot(tplot, xplot, '-',tplot, zplot, '--')
xlabel(‘Time'); ylabel('x (solid) dan z (dashed) *)
pause; $ sejenak berhenti, tekan ENTER utk lanjut
x_8s(1)=0; yest
z_ss(1) :
x_ss(2)=sart (b*(r-1)); y_ss(2)= _ ss(2li
z_ss(2)=r-1; x Ph
x_ss (3) =-sart (b* (r-1)); =x_88
2.88 (3)=r-1; ' tae
subplot (121)
plot (xplot,zplot,'~',x_ss, 2 ss, ++);
xlabel('x'); ylabel('z");
all
@ Dipindai dengan CamScanner
PERSAMAAN DIFERENSIAL Biasa 77
rte wi
subplot (122)
plot(xplot, yplot, '-', x g, tee
xlabel('x'); ylabel(ty!) ~” Y-S5* )
subplot (111)
Contoh hasilnya adalah sebagai berikut
» Lorenz
Lorenz - program komputasi persamaan Lorenz
enggunakan metode runge-hutia adaptif
Masukkan posisi awal [x y 2}- [1 1 20]
Masukkan nilai parameter r — 28
x (solid) dan z (dashed)
Gambar 2.9b - Grafik time series lorenz dgn [x y 2] = [1 1 20], 28
© Dipindai dengan CamScanner
7 PROBLEMA FISIKA DENGAN 1y,
8 Fisika KOMPUTAS! SOLUS! PR
er
Gambar 2.10 - Lorenz Attractor
Untuk menunjukkan bahwa hasilnya sangat bergantung pada kondisi awal mala
vektor awal diubah sedikit sekali dari (1 1 20] menjadi (1 1 20.01). Jad
hanya variasi 0.01 pada nilai z, dan ternyata hasilnya sangat berbeda, walaupun
pada awalnya kelihatannya sama (bandingkan Gambar 2.9 dan Gambar 2. 11).
> (Gale) dan 2 (dashed)
Thme Series Lorenz untuk fx y 2] = [1 1 20.011 1°28
@ Dipindai dengan CamScanner
pokes es
pyrereNsiAt 8 79
Gambar 2.12 - Grafik Lorenz Attractor (Butterfly Effect)
Yond aval yang sedikit bervariasi saja dapat menyebabkan perubahan yang
sangat berarti pada hasil time-series. Lorenz menyebutkan_ kondisi ini sebagai
hot (chaos).Sebagai kesimpulan adalah sangat sulit memprediksi cuact untuk
vaktu yang panjang, Karena sedikit perubahan kondisi saat ini akan menyebabkan
stuasl yang sangat berbeda kelak.
26 fo MATLAB uNTUK PERSAMAAN DIFERENSIAL
oe meryediakan beberapa fungsl yang dapat digunalian er
ee persamaan diferensial biasa (ODE), namun umumnya adala
peeslan sistem persamaan diferensial lasa jrde-1. Oleh sebab tu
Fea Miferensial orde lebih dari satu harus ditransformasi_ ke oan
singh” Aiferensial biasa orde-1. Beberapa fungsi yang tersedia antara 120
‘Jenis PD yang
sesual
fea
Runge-Kutta
Runge-Kutta
@ Dipindai dengan CamScanner
OLUS! PROBLEMA FISIKA Deni
80 Fisika KOMPUTAS! S sia,
ee eT PD stir
‘ODE23s Rosenbrock -
PD al
ODEZ3t Trapezoid D stl daa
‘ODE23tb Trapezoid + Back Difference Formula | PD stiff
(BDF)
Cara pemakaian fungsi-fungsi tersebut a eee dengan meminta informa
dant MATLAB melalui perintah help, misalnya, £9:
» help ODE23
ODE23 Solve non-stiff differential equations, Jow order method.
[TY] ODE23(®,TSPAN,YO) with TSPAN = [TO TFINAL] integrates the
system of differential equations y’= Flt) from time TO to TFINAL wih
initial conditions YO. 'F' is a string containing the name of an ODE
file. Function F(T,Y) must return a column vector. Each row in
solution array Y corresponds to a time returned in column vector T. To
obtain solutions at specific times TO, T1, ..., TFINAL (all increasing
or all decreasing), use TSPAN = [TO TI ... TFINAL]
Langkah dalam pemekaian fungsi MATLAB untuk penyelesaian ppersamezs
diferensial biasa adalah sbb:
1. Transformasi PD ke dalam sistem PD orde-1.
2. Tulis sebuah fungsi yang memuat sistem PD orde-1 tersebut
3. Gunakan fungsi MATLAB untuk menyelesaikan sistem PD tersetvt
4, Gunakan fungsi plot untuk memvisualkan hasilnya. a
i 7 " ba
an ial diselesaikan persamaan diferensial van der a
y -m(-y?)y' +y = 0;
Misalnya, untuk m= 1, 0) = 2, dan yO) =o.
1. Transformasi ke sistem PD orde-1
Andaikan y= y(1), dan dy/dt =
if
: = agave
diperoleh sistem PD. orde-1 sbb:
= y(2), maka y”
4
@ Dipindai dengan CamScanner
pers
A
RENSIAL BIAS:
y DIFEI
Maal
Eee eel
dy(2)/dt = m*(1 ~ y(1pr2y*y2y (1)
dy(l)/at = y(2)
2, Fangsi yang memuat sistem PD orde-1 dibuat Sebagai berikut
function dydt=vdp(t,y)
@ PD vander poll
mel;
dydt=[y (2); m* (1-y(1)*2) *y(2) - y(1)]
return
3. Ketik instruksi berikut ini untuk me
emilih ODE4S sebagai fungsi untuk
menyelesaikan sistem PD orde-1 tersebut:
>>[t yl] = ODE45('vap', [0 301, 2; 01);
4, Gunakan instruksi plot untuk menvisualkan hastinya:
poplot(t,y(:,1),'-* etey(s,2), 437);
petitle(*PD van der Pol’)
>exlabel (*t')
>>ylabel (+y’)
PD van der Pot
3
x Pol
Sambar 2.13 - solusi PD van 4e
@ Dipindai dengan CamScanner
ON
82 FisikA KOMPUTAS! SOLUS! PROBLEMA FISIKA DeNGay Manag
Perhatikan cara menggunakan {ungsi ODE di atas:
>> [t yl] = ODE4S(*fungsi PD’, [rentang wakty
(nilai awal})
Pada contoh datas, fungst PD adalah vdp, rentang waktu adalah dari 0 hingga %,
ditulis sebagai [0 30}, dan nilai awal adalah vektor (2; 0].
Contch lain adalah menyelesikan persamaan bandul matematis dengan salah ay
fungsi di atas:
2
Persamaan diferensial bandul matematis adalah:
do Bos
——sin(@),
rr S109), aap
diselesaikan dengan transformasi sebagai berikut:
1. Transformasi PD ke sistem PD orde-1
Andaikan y(1) = 8, dan y(2) = d0/dt = dy(1)/dt, sehingga sistem PD ore
1 adalah:
dy(1)/dt = y(2)
dy(2)/dt = -g * sin(y(1)) /L
Bentuk fungsi sistem PD orde-1 adalah:
function dydt=ayunan(t,y)
% ayunan matematis y" =
g=9.80;
L=2.0
dydt =
return
-g/L sin(y)
% percepatan gravitasi
% panjang tali bandul
(y(2); -g*sin(y(1)) 1)
3. Solusi:
>> [ty] = ODE45 (‘ayunan’, [0
30), [10*pisigo; 01)
4. Visualisasi:
>> plot(t, y(:,1),'-5);
>> title(‘Bandul Matematis’)
@ Dipindai dengan CamScanner
J iFeRENSIAL BIASA
a a 8S
gaabel ( swaktu-t’)
a yrabel ("Sudut radian’)
>
Bandul Matematis
° 5 10 18 20 2 3
waktust
Gambar 2.14 - Lintasan sudut bandul matematis
Som LaTiHAN
1
Lakukan modifikasi pada Program
“Bandul" sehingga penyelesaian dilakukan
an metode euler-cromer. Bagai
mana hasiinya dibanding metode verlet?
2% Bax program
eerie deans Metelesaikan persamean bola jatuh bebas. Lakukan
tingga | pre berbagai nilai koefisien hambatan udara Cd, mulai dari 0.0
4 lengan kenaikan 0.2
Galileo p,
eraan met Menatakan bahwa apabila ada dua bola best masing-masing
Taka, da be 100 Ib, dan 1 Ib dijatuhkan dari ketinggian sekitar 50 meter
Bakitan de at akan jatuh lebih dulu, bola ringan 2 inchi di belakangnya.
alah ig On 20M pada no. 2 bahwa pemyataan ity sah. Alay
tertentu yang bisa membuktikan bahwa pernyataan itu benar’
,
Dipindai dengan CamScanner
84 FisikA KOMPUTAS! SOLUS! PROBLEMA Fisik, De
‘GAN
4. Gunakan ODE45 untuk menyelesaikan sistem pe
berikut ini: fin dota
dx/dt=(a-bx-cy)x; — dy/dt=(d+ex)y
di mana a=10, b=10-5, c=0.1, d=10, dan e= 0.1. x(0) = 19, Ors
%
@ Dipindai dengan CamScanner
You might also like
- Ika Puspita - 1911014220016 - Laporan 2Document15 pagesIka Puspita - 1911014220016 - Laporan 2Jana IskaNo ratings yet
- Ika Puspita - 1911014220016 - Laporan 3Document10 pagesIka Puspita - 1911014220016 - Laporan 3Jana IskaNo ratings yet
- Ika Puspita - 1911014220016 - Laporan 6Document9 pagesIka Puspita - 1911014220016 - Laporan 6Jana IskaNo ratings yet
- KUIS 1 FistatDocument1 pageKUIS 1 FistatJana IskaNo ratings yet
- Keberhasilan RamadhanDocument20 pagesKeberhasilan RamadhanJana IskaNo ratings yet
- Pertemuan - 2 FistatDocument5 pagesPertemuan - 2 FistatJana IskaNo ratings yet
- Muhammad Iska Sujana SISPENGDocument13 pagesMuhammad Iska Sujana SISPENGJana IskaNo ratings yet
- Laela Azizah (211101422006) - Tugas2 FiskomDocument10 pagesLaela Azizah (211101422006) - Tugas2 FiskomJana IskaNo ratings yet
- PERTEMUAN - 5 Dan 6Document3 pagesPERTEMUAN - 5 Dan 6Jana IskaNo ratings yet
- 6Document3 pages6Jana IskaNo ratings yet
- Pertemuan - 1 Fisika StatistikDocument3 pagesPertemuan - 1 Fisika StatistikJana IskaNo ratings yet
- Charging Iman MLQDocument5 pagesCharging Iman MLQJana IskaNo ratings yet
- Petunjuk Tes Simulasi FisikaDocument2 pagesPetunjuk Tes Simulasi FisikaJana IskaNo ratings yet
- Pengukuran Panjang Dan BeratDocument18 pagesPengukuran Panjang Dan BeratJana IskaNo ratings yet
- ULANGAN TENGAH SEMESTER - Muhammad Iska Sujana - 1911014210021Document13 pagesULANGAN TENGAH SEMESTER - Muhammad Iska Sujana - 1911014210021Jana IskaNo ratings yet
- Spektroskopi NMR PDFDocument19 pagesSpektroskopi NMR PDFJana IskaNo ratings yet
- Jurnal 6b EksperDocument4 pagesJurnal 6b EksperJana IskaNo ratings yet
- Undangan Sistem CBT KNMIPA 2020Document1 pageUndangan Sistem CBT KNMIPA 2020Jana IskaNo ratings yet