You might also like
- GRF: L G R F 3DS R R: Earning A Eneral Adiance Ield For Cene Epresentation and EnderingDocument28 pagesGRF: L G R F 3DS R R: Earning A Eneral Adiance Ield For Cene Epresentation and EnderingSushobhan GhoshNo ratings yet
- 3D-Kernel Foveated Rendering For Light FieldsDocument11 pages3D-Kernel Foveated Rendering For Light FieldsManthiramurthy ParamasivamNo ratings yet
- Dissertation Proposal: Greg Coombe University of North Carolina August 22, 2005Document17 pagesDissertation Proposal: Greg Coombe University of North Carolina August 22, 2005LambertNo ratings yet
- Translucent Shadow MapsDocument6 pagesTranslucent Shadow Maps汪听No ratings yet
- Giga Voxels SIggraph TalkDocument1 pageGiga Voxels SIggraph TalkendofunctorNo ratings yet
- RGB-D Mapping: Using Kinect-Style Depth Cameras For Dense 3D Modeling of Indoor EnvironmentsDocument28 pagesRGB-D Mapping: Using Kinect-Style Depth Cameras For Dense 3D Modeling of Indoor EnvironmentsZQQNo ratings yet
- RANSAC Vs ICP PDFDocument15 pagesRANSAC Vs ICP PDFSaransh Vora100% (1)
- Raynet: Learning Volumetric 3D Reconstruction With Ray PotentialsDocument10 pagesRaynet: Learning Volumetric 3D Reconstruction With Ray PotentialsIgnacio VizzoNo ratings yet
- Depth Estimation From Single Image Using CNN-Residual NetworkDocument8 pagesDepth Estimation From Single Image Using CNN-Residual NetworkBora CobanogluNo ratings yet
- The Data Reduction Using Matlab For Different Speckle Images Form Small Surfaces RoughnessDocument10 pagesThe Data Reduction Using Matlab For Different Speckle Images Form Small Surfaces RoughnessIJAR JOURNALNo ratings yet
- Bai TransFusion Robust LiDAR-Camera Fusion For 3D Object Detection With Transformers CVPR 2022 PaperDocument10 pagesBai TransFusion Robust LiDAR-Camera Fusion For 3D Object Detection With Transformers CVPR 2022 PaperhaisabiNo ratings yet
- Point Based Rendering Enhancement Via Deep Learning: December 16, 2018Document13 pagesPoint Based Rendering Enhancement Via Deep Learning: December 16, 2018ArmandoNo ratings yet
- Neural-Network-Based Photometric Stereo For 3D Surface ReconstructionDocument7 pagesNeural-Network-Based Photometric Stereo For 3D Surface Reconstructionvivian yulie Quintero BarreraNo ratings yet
- Yang SANet Scene Agnostic Network For Camera Localization ICCV 2019 PaperDocument10 pagesYang SANet Scene Agnostic Network For Camera Localization ICCV 2019 Papervishalk172No ratings yet
- Im High Quality Structure ICCV 2015 PaperDocument9 pagesIm High Quality Structure ICCV 2015 PaperGhazlan HishamNo ratings yet
- Nerf: Representing Scenes As Neural Radiance Fields For View SynthesisDocument25 pagesNerf: Representing Scenes As Neural Radiance Fields For View SynthesisaakarshNo ratings yet
- Deep Continuous FusionDocument16 pagesDeep Continuous FusionManoj BhatNo ratings yet
- 2020 CVPR EpipolarTransformerDocument10 pages2020 CVPR EpipolarTransformerChengzeng FengNo ratings yet
- An Irradiance Atlas For Global Illumination in Complex Production ScenesDocument10 pagesAn Irradiance Atlas For Global Illumination in Complex Production ScenesClara MagalhãesNo ratings yet
- Lyu Learning To Segment 3D Point Clouds in 2D Image Space CVPR 2020 PaperDocument10 pagesLyu Learning To Segment 3D Point Clouds in 2D Image Space CVPR 2020 PaperArmandoNo ratings yet
- 3d Mapping Iser 10 FinalDocument15 pages3d Mapping Iser 10 FinalHieu TranNo ratings yet
- Patch Refinement - Localized 3D Object DetectionDocument10 pagesPatch Refinement - Localized 3D Object Detectionumme sultanaNo ratings yet
- Diff ShaderDocument12 pagesDiff Shaderds0313No ratings yet
- Meteorological Radar Noise Image Semantic Segmentation Method Based On Deep Convolutional Neural NetworkDocument9 pagesMeteorological Radar Noise Image Semantic Segmentation Method Based On Deep Convolutional Neural NetworkFelipe RossattoNo ratings yet
- Self Localizing Smart Camera Networks and Their ApplicationsDocument5 pagesSelf Localizing Smart Camera Networks and Their ApplicationsKhoid DiamNo ratings yet
- CNN-SLAM: Real-Time Dense Monocular SLAM With Learned Depth PredictionDocument10 pagesCNN-SLAM: Real-Time Dense Monocular SLAM With Learned Depth PredictionbocailloNo ratings yet
- (2021) Temporal-Channel - Transformer - For - 3D - Lidar-Based - Video - Object - Detection - For - Autonomous - DrivingDocument11 pages(2021) Temporal-Channel - Transformer - For - 3D - Lidar-Based - Video - Object - Detection - For - Autonomous - Drivingtanwarmanish194No ratings yet
- Free View SynthesisDocument17 pagesFree View SynthesisVishnu RamachandranNo ratings yet
- Bayesian Stochastic Mesh Optimisation For 3D Reconstruction: George Vogiatzis Philip Torr Roberto CipollaDocument12 pagesBayesian Stochastic Mesh Optimisation For 3D Reconstruction: George Vogiatzis Philip Torr Roberto CipollaneilwuNo ratings yet
- Real-Time Camera Tracking and 3D Reconstruction Using Signed Distance FunctionsDocument8 pagesReal-Time Camera Tracking and 3D Reconstruction Using Signed Distance FunctionsBinh Pham ThanhNo ratings yet
- Automated 3D Scenes Reconstruction For Mobile Robots Using Laser ScanningDocument6 pagesAutomated 3D Scenes Reconstruction For Mobile Robots Using Laser ScanningIan MedeirosNo ratings yet
- Neural Point-Based Graphics: Kara-Ali Aliev, Dmitry Ulyanov, Victor LempitskyDocument11 pagesNeural Point-Based Graphics: Kara-Ali Aliev, Dmitry Ulyanov, Victor LempitskyChidera UnigweNo ratings yet
- 3Dmfv: 3D Point Cloud Classification in Real-Time Using Convolutional Neural NetworksDocument8 pages3Dmfv: 3D Point Cloud Classification in Real-Time Using Convolutional Neural NetworksNina MouhoubNo ratings yet
- VoxNet A 3D Convolutional Neural Network For Real-Time Object RecognitionDocument7 pagesVoxNet A 3D Convolutional Neural Network For Real-Time Object RecognitionNyein Thu Thu AungNo ratings yet
- Light Field Image Processing: An OverviewDocument29 pagesLight Field Image Processing: An OverviewWafa BenzaouiNo ratings yet
- An Adaptive Subdivision Algorithm and Parallel Architecture For Realistic Image SynthesisDocument10 pagesAn Adaptive Subdivision Algorithm and Parallel Architecture For Realistic Image SynthesisAnis HadjariNo ratings yet
- Semantic Mapping Using Object-Class Segmentation of RGB-D ImagesDocument6 pagesSemantic Mapping Using Object-Class Segmentation of RGB-D ImagesDefa SaputraNo ratings yet
- NeRF - NavigationDocument8 pagesNeRF - NavigationBach NguyenNo ratings yet
- Pointconv: Deep Convolutional Networks On 3D Point CloudsDocument10 pagesPointconv: Deep Convolutional Networks On 3D Point CloudscuimosemailNo ratings yet
- Real-Time Semantic Slam With DCNN-based Feature Point Detection, Matching and Dense Point Cloud AggregationDocument6 pagesReal-Time Semantic Slam With DCNN-based Feature Point Detection, Matching and Dense Point Cloud AggregationJUAN CAMILO TORRES MUNOZNo ratings yet
- Conditional Random Fields For Lidar Point Cloud cl1Document7 pagesConditional Random Fields For Lidar Point Cloud cl1DUVAN CAMILO GOMEZ PALACIOSNo ratings yet
- Optics Communications: Di Guo, Jingwen Yan, Xiaobo QuDocument7 pagesOptics Communications: Di Guo, Jingwen Yan, Xiaobo QuWafa BenzaouiNo ratings yet
- Resolution Adjustable 3D Scanner Based On Using Stereo CamerasDocument5 pagesResolution Adjustable 3D Scanner Based On Using Stereo Camerasverze1No ratings yet
- Learning Conditional Photometric Stereo With High-Resolution FeaturesDocument14 pagesLearning Conditional Photometric Stereo With High-Resolution Featuresifte5104385No ratings yet
- Zeng 2014 IOP Conf. Ser. Earth Environ. Sci. 17 012160Document8 pagesZeng 2014 IOP Conf. Ser. Earth Environ. Sci. 17 012160vishwas sNo ratings yet
- Single-Shot Three-Dimensional Imaging With A Metasurface Depth CameraDocument21 pagesSingle-Shot Three-Dimensional Imaging With A Metasurface Depth Cameramadridista suNo ratings yet
- Robert SoDocument9 pagesRobert Somaiwu8675No ratings yet
- Super Resolucion de ImagenesDocument6 pagesSuper Resolucion de ImagenesJuan Pablo ViviescasNo ratings yet
- Debevec Siggraph98Document10 pagesDebevec Siggraph98Claudio Liandro BudalNo ratings yet
- Li Stereo R-CNN Based 3D Object Detection For Autonomous Driving CVPR 2019 PaperDocument9 pagesLi Stereo R-CNN Based 3D Object Detection For Autonomous Driving CVPR 2019 PaperXiaotian LiuNo ratings yet
- Point-NeRF Point-Based Neural Radiance FieldsDocument16 pagesPoint-NeRF Point-Based Neural Radiance Fields854694704No ratings yet
- Center FormerDocument17 pagesCenter FormerRonald BbosaNo ratings yet
- Shift RCNNDocument2 pagesShift RCNNVlad PaunescuNo ratings yet
- 3D Object Detection CS230 Project Report: Suvasis Mukherjee Stanford University (Suvasism@stanford - Edu)Document7 pages3D Object Detection CS230 Project Report: Suvasis Mukherjee Stanford University (Suvasism@stanford - Edu)Bảo Nguyễn Hoàng DuyNo ratings yet
- High-Accuracy Stereo Depth Maps Using Structured LightDocument8 pagesHigh-Accuracy Stereo Depth Maps Using Structured LightLuisAlbertoPadillaNo ratings yet
- Mescheder Occupancy Networks Learning 3D Reconstruction in Function Space CVPR 2019 PaperDocument11 pagesMescheder Occupancy Networks Learning 3D Reconstruction in Function Space CVPR 2019 PaperQinan ZhangNo ratings yet
- 3d Iccv17Document10 pages3d Iccv17Huy Nguyễn BảoNo ratings yet
- Correspondence Search: Implicit MorphingDocument1 pageCorrespondence Search: Implicit Morphingcanvio canvio2No ratings yet
- A Novel Attention Fully Convolutional Network Method For Synthetic Aperture Radar Image SegmentationDocument14 pagesA Novel Attention Fully Convolutional Network Method For Synthetic Aperture Radar Image SegmentationvishvcyberNo ratings yet
- Ost 2021 EccvDocument11 pagesOst 2021 EccvYan AecNo ratings yet
- Wu 2022 ArxivDocument15 pagesWu 2022 ArxivYan AecNo ratings yet
- Zhang 2023 ArxivDocument11 pagesZhang 2023 ArxivYan AecNo ratings yet
- Sitzmann 2020 CVPRDocument23 pagesSitzmann 2020 CVPRYan AecNo ratings yet
- Sajjadi 2022 NeuripsDocument18 pagesSajjadi 2022 NeuripsYan AecNo ratings yet
- Sifferman 2022 ArxivDocument23 pagesSifferman 2022 ArxivYan AecNo ratings yet
- Song 2022 CVPRDocument22 pagesSong 2022 CVPRYan AecNo ratings yet
- Chang 2023 ArxivDocument20 pagesChang 2023 ArxivYan AecNo ratings yet
- Xu 2020 CorlDocument17 pagesXu 2020 CorlYan AecNo ratings yet
- QAI Golden Pass Fact SheetDocument2 pagesQAI Golden Pass Fact SheetQatar-America InstituteNo ratings yet
- Week 1 Familiarize The VmgoDocument10 pagesWeek 1 Familiarize The VmgoHizzel De CastroNo ratings yet
- MATH 304 Linear Algebra Lecture 9 - Subspaces of Vector Spaces (Continued) - Span. Spanning Set PDFDocument20 pagesMATH 304 Linear Algebra Lecture 9 - Subspaces of Vector Spaces (Continued) - Span. Spanning Set PDFmurugan2284No ratings yet
- Macros and DirectiveDocument7 pagesMacros and DirectiveAbdul MoeedNo ratings yet
- 03 IGT-Influence of Codes Guidelines and Other Regulations On The Tunnel Design in AustriaDocument48 pages03 IGT-Influence of Codes Guidelines and Other Regulations On The Tunnel Design in AustriaSudarshan GadalkarNo ratings yet
- C103 - General Checklist - ISO-IEC 17025:2017 Accreditation of Field Testing and Field Calibration LaboratoriesDocument19 pagesC103 - General Checklist - ISO-IEC 17025:2017 Accreditation of Field Testing and Field Calibration LaboratorieshuidhyiuodghNo ratings yet
- Uniden PowerMax 5.8Ghz-DSS5865 - 5855 User Manual PDFDocument64 pagesUniden PowerMax 5.8Ghz-DSS5865 - 5855 User Manual PDFtradosevic4091No ratings yet
- Wiska Varitain - 0912Document18 pagesWiska Varitain - 0912Anonymous hHWOMl4FvNo ratings yet
- Product Handbook Arendal 1961 Series SubwoofersDocument44 pagesProduct Handbook Arendal 1961 Series SubwoofersDomagoj KovacevicNo ratings yet
- 한국항만 (영문)Document38 pages한국항만 (영문)hiyeonNo ratings yet
- CBC DrivingDocument74 pagesCBC DrivingElonah Jean ConstantinoNo ratings yet
- A Detailed Lesson PlanDocument5 pagesA Detailed Lesson PlanIsaac-elmar Agtarap74% (23)
- Lab 1Document51 pagesLab 1aliNo ratings yet
- Royal British College Dancesport TeamDocument10 pagesRoyal British College Dancesport TeamAnna rose CabatinganNo ratings yet
- A-1660 11TH Trimester From Mcdowell To Vodafone Interpretation of Tax Law in Cases. OriginalDocument18 pagesA-1660 11TH Trimester From Mcdowell To Vodafone Interpretation of Tax Law in Cases. OriginalPrasun TiwariNo ratings yet
- ENSC1001 Unit Outline 2014Document12 pagesENSC1001 Unit Outline 2014TheColonel999No ratings yet
- Carbohydrates StainsDocument43 pagesCarbohydrates StainssupahvyNo ratings yet
- PedagogicalDocument94 pagesPedagogicalEdson MorenoNo ratings yet
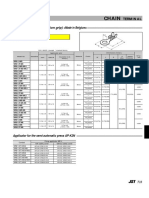
- Chain: SRB Series (With Insulation Grip)Document1 pageChain: SRB Series (With Insulation Grip)shankarNo ratings yet
- Sub-Wings of YuvanjaliDocument2 pagesSub-Wings of Yuvanjalin_tapovan987100% (1)
- The Handmaid's TaleDocument40 pagesThe Handmaid's Taleleher shahNo ratings yet
- Literature Review - Part Time Job Among StudentDocument3 pagesLiterature Review - Part Time Job Among StudentMarria65% (20)
- Paper 1 Computer Science ASDocument194 pagesPaper 1 Computer Science ASLailaEl-BeheiryNo ratings yet
- Pot-Roasted Beef BrisketDocument4 pagesPot-Roasted Beef Brisketmarcelo nubileNo ratings yet
- Kaun Banega Crorepati Computer C++ ProjectDocument20 pagesKaun Banega Crorepati Computer C++ ProjectDhanya SudheerNo ratings yet
- Design of Purlins: Try 75mm X 100mm: Case 1Document12 pagesDesign of Purlins: Try 75mm X 100mm: Case 1Pamela Joanne Falo AndradeNo ratings yet
- Action Plan in T.L.E Project Title Objectives Activities Person-In-Charge Time Frame Success IndicatorDocument1 pageAction Plan in T.L.E Project Title Objectives Activities Person-In-Charge Time Frame Success IndicatorEdelmar BenosaNo ratings yet
- Antenatal Care (ANC)Document77 pagesAntenatal Care (ANC)tareNo ratings yet
- Coating Resins Technical Data SYNOCURE 867S - 60Document1 pageCoating Resins Technical Data SYNOCURE 867S - 60Heramb TrifaleyNo ratings yet
- Earth Science NAME - DATEDocument3 pagesEarth Science NAME - DATEArlene CalataNo ratings yet