Professional Documents
Culture Documents
Low Power High Voltage Motor Control Board User's Guide: 2017 Microchip Technology Inc
Uploaded by
jay lowkeyOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Low Power High Voltage Motor Control Board User's Guide: 2017 Microchip Technology Inc
Uploaded by
jay lowkeyCopyright:
Available Formats
Low Power High Voltage
Motor Control Board
User’s Guide
2017 Microchip Technology Inc.
Note the following details of the code protection feature on Microchip devices:
• Microchip products meet the specification contained in their particular Microchip Data Sheet.
• Microchip believes that its family of products is one of the most secure families of its kind on the market today, when used in the
intended manner and under normal conditions.
• There are dishonest and possibly illegal methods used to breach the code protection feature. All of these methods, to our
knowledge, require using the Microchip products in a manner outside the operating specifications contained in Microchip’s Data
Sheets. Most likely, the person doing so is engaged in theft of intellectual property.
• Microchip is willing to work with the customer who is concerned about the integrity of their code.
• Neither Microchip nor any other semiconductor manufacturer can guarantee the security of their code. Code protection does not
mean that we are guaranteeing the product as “unbreakable.”
Code protection is constantly evolving. We at Microchip are committed to continuously improving the code protection features of our
products. Attempts to break Microchip’s code protection feature may be a violation of the Digital Millennium Copyright Act. If such acts
allow unauthorized access to your software or other copyrighted work, you may have a right to sue for relief under that Act.
Information contained in this publication regarding device Trademarks
applications and the like is provided only for your convenience The Microchip name and logo, the Microchip logo, AnyRate, AVR,
and may be superseded by updates. It is your responsibility to AVR logo, AVR Freaks, BeaconThings, BitCloud, CryptoMemory,
ensure that your application meets with your specifications. CryptoRF, dsPIC, FlashFlex, flexPWR, Heldo, JukeBlox, KEELOQ,
MICROCHIP MAKES NO REPRESENTATIONS OR KEELOQ logo, Kleer, LANCheck, LINK MD, maXStylus,
WARRANTIES OF ANY KIND WHETHER EXPRESS OR maXTouch, MediaLB, megaAVR, MOST, MOST logo, MPLAB,
IMPLIED, WRITTEN OR ORAL, STATUTORY OR OptoLyzer, PIC, picoPower, PICSTART, PIC32 logo, Prochip
OTHERWISE, RELATED TO THE INFORMATION, Designer, QTouch, RightTouch, SAM-BA, SpyNIC, SST, SST
INCLUDING BUT NOT LIMITED TO ITS CONDITION, Logo, SuperFlash, tinyAVR, UNI/O, and XMEGA are registered
QUALITY, PERFORMANCE, MERCHANTABILITY OR trademarks of Microchip Technology Incorporated in the U.S.A.
FITNESS FOR PURPOSE. Microchip disclaims all liability and other countries.
arising from this information and its use. Use of Microchip ClockWorks, The Embedded Control Solutions Company,
devices in life support and/or safety applications is entirely at EtherSynch, Hyper Speed Control, HyperLight Load, IntelliMOS,
the buyer’s risk, and the buyer agrees to defend, indemnify and mTouch, Precision Edge, and Quiet-Wire are registered
hold harmless Microchip from any and all damages, claims, trademarks of Microchip Technology Incorporated in the U.S.A.
suits, or expenses resulting from such use. No licenses are Adjacent Key Suppression, AKS, Analog-for-the-Digital Age, Any
conveyed, implicitly or otherwise, under any Microchip Capacitor, AnyIn, AnyOut, BodyCom, chipKIT, chipKIT logo,
intellectual property rights unless otherwise stated. CodeGuard, CryptoAuthentication, CryptoCompanion,
CryptoController, dsPICDEM, dsPICDEM.net, Dynamic Average
Matching, DAM, ECAN, EtherGREEN, In-Circuit Serial
Programming, ICSP, Inter-Chip Connectivity, JitterBlocker,
KleerNet, KleerNet logo, Mindi, MiWi, motorBench, MPASM, MPF,
MPLAB Certified logo, MPLIB, MPLINK, MultiTRAK, NetDetach,
Omniscient Code Generation, PICDEM, PICDEM.net, PICkit,
PICtail, PureSilicon, QMatrix, RightTouch logo, REAL ICE, Ripple
Blocker, SAM-ICE, Serial Quad I/O, SMART-I.S., SQI,
SuperSwitcher, SuperSwitcher II, Total Endurance, TSHARC,
USBCheck, VariSense, ViewSpan, WiperLock, Wireless DNA,
and ZENA are trademarks of Microchip Technology Incorporated
in the U.S.A. and other countries.
SQTP is a service mark of Microchip Technology Incorporated in
Microchip received ISO/TS-16949:2009 certification for its worldwide the U.S.A.
headquarters, design and wafer fabrication facilities in Chandler and
Tempe, Arizona; Gresham, Oregon and design centers in California Silicon Storage Technology is a registered trademark of Microchip
and India. The Company’s quality system processes and procedures Technology Inc. in other countries.
are for its PIC® MCUs and dsPIC® DSCs, KEELOQ® code hopping
devices, Serial EEPROMs, microperipherals, nonvolatile memory and GestIC is a registered trademark of Microchip Technology
analog products. In addition, Microchip’s quality system for the design Germany II GmbH & Co. KG, a subsidiary of Microchip
and manufacture of development systems is ISO 9001:2000 certified. Technology Inc., in other countries.
All other trademarks mentioned herein are property of their
respective companies.
© 2017, Microchip Technology Incorporated, All Rights Reserved.
ISBN:
page 2 2017 Microchip Technology Inc.
LOW POWER HIGH VOLTAGE
MOTOR CONTROL BOARD
USER’S GUIDE
Safety Notice
The safety notices and operating instructions provided should be adhered to, to avoid
a safety hazard. If in any doubt, consult your supplier.
WARNING – This system must be earthed (grounded) at all times.
WARNING – The output terminals are NOT isolated from the incoming AC mains
supply and may be at up to 410V with respect to earth ground, regardless of the input
mains supply voltage applied. These terminals are live during operation AND for five
minutes after disconnection from the supply. Do not attempt to access the terminals or
remove the cover during this time.
WARNING – The unit may obtain power through the output terminals if these are
connected to a rotating motor acting as a generator. If this is the case, then the previous
warning also applies (i.e., the output terminals are live when connected to the genera-
tor and for five minutes after the generator has been stopped). Note that this case can
arise even when the unit has been disconnected from the incoming AC mains supply.
CAUTION – The system should not be installed, operated, serviced or modified except
by qualified personnel who understand the danger of electric shock hazards and have
read and understood the user instructions. Any service or modification performed by
the user is done at the user’s own risk and voids all warranties.
CAUTION – If a motor is connected to the output of this unit, the frame should be
connected to the output protective ground terminal provided. Particular care should be
taken to mechanically guard such a motor, bearing in mind that unexpected behavior
is likely to result from the process of code development.
CAUTION – For continued protection against the risk of fire, replace the fuse with one
of the same type only (i.e., Fast Act Fuse 5A/250V).
• The system is intended for evaluation and development purposes and should only
be operated in a normal laboratory environment as defined by IEC 61010-1:2001
• Clean with a dry cloth only
• Operate flat on a bench, do not move during operation and do not block the
ventilation holes
• The system should not be operated without all the supplied covers fully secured in
place
• The system should not be connected or operated if there is any apparent damage
to the unit
• The unit is designed to be connected to the AC mains supply via a standard non-
locking plug. As the unit has no mains switch, this plug constitutes the means of
disconnection from the supply and thus the user must have unobstructed access
to this plug during operation.
2017 Microchip Technology Inc. page 3
Low Power High Voltage Motor Control Board User’s Guide
NOTES:
page 4 2017 Microchip Technology Inc.
LOW POWER HIGH VOLTAGE
MOTOR CONTROL BOARD
USER’S GUIDE
Table of Contents
Safety Notice ................................................................................................................. 3
Preface ........................................................................................................................... 3
Chapter 1. Introduction
1.1 Overview ........................................................................................................ 9
1.2 Features ....................................................................................................... 10
Chapter 2. Getting Started
2.1 Introduction ................................................................................................... 13
2.2 Board Layout ................................................................................................ 13
2.3 User Interface ............................................................................................... 14
Chapter 3. Hardware
3.1 Hardware Setup ........................................................................................... 19
Chapter 4. Running the Demonstration
4.1 Demonstration Requirements ....................................................................... 21
4.2 Software Setup and Run .............................................................................. 21
Appendix A. Board Schematics and Layout.............................................................. 25
A.1 Board Schematics and Layout ..................................................................... 25
Appendix B. Power Rating of Inverter or Integrated Power Module (IPM) ............. 33
B.1 Introduction .................................................................................................. 33
B.2 Power Loss .................................................................................................. 33
Worldwide Sales and Service .................................................................................... 35
2017 Microchip Technology Inc. page 1
Low Power High Voltage Motor Control Board User’s Guide
DS00000A-page 2 2017 Microchip Technology Inc.
LOW POWER HIGH VOLTAGE
MOTOR CONTROL BOARD
USER’S GUIDE
Preface
INTRODUCTION
This preface contains general information that will be useful to know before using the
Low Power High Voltage Board. Topics discussed in this preface include:
• Document Layout
• Conventions Used in this Guide
• Recommended Reading
• The Microchip Web Site
• Development Systems Customer Change Notification Service
• Customer Support
• Document Revision History
DOCUMENT LAYOUT
This user’s guide describes how to use the Low Power High Voltage Board. The doc-
ument is organized as follows:
• Chapter 1. “Introduction” – This chapter introduces the Low Power High Volt-
age Board and provides a brief overview of its features.
• Chapter 2. “Getting Started” – This chapter provides information on getting
started with the Low Power High Voltage Board.
• Chapter 3. “Hardware” – This chapter describes the hardware on the Low Power
High Voltage Board.
• Chapter 4. “Running the Demonstration” – This chapter describes the
demonstration software that is intended for the Low Power High Voltage Board
and the procedure to run the board.
• Appendix A. “Board Schematics and Layout” – This appendix displays the
schematics and layout of the board.
• Appendix B. “Power Rating of Inverter or Integrated Power Module (IPM)” –
This appendix discusses the power rating/power loss related issues.
2017 Microchip Technology Inc. page 3
Low Power High Voltage Motor Control Board User’s Guide
CONVENTIONS USED IN THIS GUIDE
This manual uses the following documentation conventions:
DOCUMENTATION CONVENTIONS
Description Represents Examples
Arial font:
Italic characters Referenced books MPLAB® IDE User’s Guide
Emphasized text ...is the only compiler...
Initial caps A window the Output window
A dialog the Settings dialog
A menu selection select Enable Programmer
Quotes A field name in a window or “Save project before build”
dialog
Underlined, italic text with A menu path File>Save
right angle bracket
Bold characters A dialog button Click OK
A tab Click the Power tab
N‘Rnnnn A number in verilog format, 4‘b0010, 2‘hF1
where N is the total number of
digits, R is the radix and n is a
digit.
Text in angle brackets < > A key on the keyboard Press <Enter>, <F1>
Courier New font:
Plain Courier New Sample source code #define START
Filenames autoexec.bat
File paths c:\mcc18\h
Keywords _asm, _endasm, static
Command-line options -Opa+, -Opa-
Bit values 0, 1
Constants 0xFF, ‘A’
Italic Courier New A variable argument file.o, where file can be
any valid filename
Square brackets [ ] Optional arguments mcc18 [options] file
[options]
Curly braces and pipe Choice of mutually exclusive errorlevel {0|1}
character: { | } arguments; an OR selection
Ellipses... Replaces repeated text var_name [,
var_name...]
Represents code supplied by void main (void)
user { ...
}
page 4 2017 Microchip Technology Inc.
Preface
RECOMMENDED READING
This user’s guide describes how to use the Low Power High Voltage Board. The device-
specific data sheets contain current information on programming the specific microcontrol-
ler or digital signal controller devices. Other useful documents are listed below. The follow-
ing Microchip documents are available and recommended as supplemental reference
resources:
MPLAB® XC16 C Compiler User’s Guide (DS50002071)
This user’s guide describes how to use the 16-bit MPLAB® XC16 C Compiler. Please
visit www.microchip.com/compilers for more information.
MPLAB® IDE User’s Guide (DS51519)
This user’s guide describes how to set up the MPLAB® IDE software and use it to cre-
ate projects and program devices.
MPLAB® X IDE User’s Guide (DS52027)
This document describes how to setup the MPLAB® X IDE software and use it to create
projects and program devices.
MPLAB® XC16 Assembler, Linker and Utilities User’s Guide
(DS50002106)
This user’s guide describes how to use GNU language tools to write code for 16-bit
applications.
Readme Files
For the latest information on using other tools, read the tool-specific Readme files in
the Readme subdirectory of the MPLAB® IDE installation directory. The Readme files
contain updated information and known issues that may not be included in this user’s
guide.
To obtain any of these documents, visit the Microchip web site at www.microchip.com.
2017 Microchip Technology Inc. page 5
Low Power High Voltage Motor Control Board User’s Guide
THE MICROCHIP WEB SITE
Microchip provides online support via our web site at www.microchip.com. This web
site is used as a means to make files and information easily available to customers.
Accessible by using your favorite Internet browser, the web site contains the following
information:
• Product Support – Data sheets and errata, application notes and sample
programs, design resources, user’s guides and hardware support documents,
latest software releases and archived software
• General Technical Support – Frequently Asked Questions (FAQs), technical
support requests, online discussion groups, Microchip consultant program
member listing
• Business of Microchip – Product selector and ordering guides, latest Microchip
press releases, listing of seminars and events, listings of Microchip sales offices,
distributors and factory representatives
DEVELOPMENT SYSTEMS CUSTOMER CHANGE NOTIFICATION SERVICE
Microchip’s customer notification service helps keep customers current on Microchip
products. Subscribers will receive e-mail notification whenever there are changes,
updates, revisions or errata related to a specified product family or development tool of
interest.
To register, access the Microchip web site at www.microchip.com, click on Customer
Change Notification and follow the registration instructions.
The Development Systems product group categories are:
• Compilers – The latest information on Microchip C compilers and other language
tools. These include the MPLAB® C compiler; MPASM™ and MPLAB® 16-bit
assemblers; MPLINK™ and MPLAB® 16-bit object linkers; and MPLIB™ and
MPLAB® 16-bit object librarians.
• Emulators – The latest information on the Microchip MPLAB® REAL ICE™
in-circuit emulator.
• In-Circuit Debuggers – The latest information on the Microchip in-circuit
debugger, MPLAB® ICD 3.
• MPLAB IDE – The latest information on Microchip MPLAB® IDE, the Windows®
Integrated Development Environment for development systems tools. This list is
focused on the MPLAB® IDE, MPLAB® SIM simulator, MPLAB® IDE Project Man-
ager and general editing and debugging features.
• Programmers – The latest information on Microchip programmers. These include
the MPLAB® PM3 device programmer and the PICkit™ 3 development
programmers.
page 6 2017 Microchip Technology Inc.
Preface
CUSTOMER SUPPORT
Users of Microchip products can receive assistance through several channels:
• Distributor or Representative
• Local Sales Office
• Field Application Engineer (FAE)
• Technical Support
Customers should contact their distributor, representative or FAE for support. Local
sales offices are also available to help customers. A listing of sales offices and loca-
tions is included in the back of this document.
Technical support is available through the web site at: http://support.microchip.com
DOCUMENT REVISION HISTORY
Revision A (April 2017)
This is the initial released version of the document.
2017 Microchip Technology Inc. page 7
Low Power High Voltage Motor Control Board User’s Guide
NOTES:
page 8 2017 Microchip Technology Inc.
LOW POWER HIGH VOLTAGE
MOTOR CONTROL BOARD
USER’S GUIDE
Chapter 1. Introduction
1.1 OVERVIEW
The Low Power High Voltage Motor Control Board is designed to help the user in rapid
evaluation of a wide variety of motor control applications using Microchip’s
dsPIC® DSC dsPIC33EP64MC206. This compact and cost-effective board has a 3-
phase power module with a built-in driver and is targeted to control various types of
high-voltage motors such as Brushless DC (BLDC) motors, Permanent Magnet Syn-
chronous Motors (PMSM) and AC Induction Motors (ACIM) in sensored or sensorless
mode of operation. Figure 1-1 displays a photograph of the Low Power High Voltage
Motor Control Board.
FIGURE 1-1: LOW POWER HIGH VOLTAGE MOTOR CONTROL BOARD
2017 Microchip Technology Inc. page 9
Low Power High Voltage Motor Control Board User’s Guide
Figure 1-2 shows a block diagram showing the main components of the Low Power
High Voltage Motor Control Board.
FIGURE 1-2: SYSTEM BLOCK DIAGRAM
RX/TX
Low Power High Voltage Motor Control Board
Communication
User Interface
Voltage Feedback Push Buttons
Non-Isolated
Circuitry (DC Bus
1.5V, 3.3V and Isolated
and Motor BEMFs)
Isolated 5V
dsPIC33EP64MC206 Hall Sensor/
FG Signal
QEI, FG Signal
Rectifier Current Feedback Hall Sensor/
Circuitry (DC Bus and QEI Circuitry
Phase Currents)
EMI Choke,
Inrush Current
Protection, Debug/Fault LEDs
Fuse Power Module
(3-Phase ICSP™ Connector
MOSFET Bridge) Non-Isolated
External Programmer/
90 VAC-230V AC
Debugger
Motor
1.2 FEATURES
Some of the key features of the Low Power High Voltage Motor Control Board are:
• 3-phase motor control evaluation board for driving Low Power High Voltage
BLDC/ PMSM motors.
• Current amplification and over-current protection through Op-Amps/comparators
internal to the dsPIC33EP64MC206.
• The motor drive stage uses an Integrated Power Module (IPM) with a built-in
temperature sensing circuit.
• Phase voltage feedback for sensorless BLDC operation and windmilling.
• DC bus and Phase current sensing for single/dual shunt sensorless FOC control.
• Non-isolated connector for Hall sensors/Quadrature Encoder Interface (QEI) for
sensored motor control algorithms.
• Isolated logic level (5V) UART interface.
• Four LEDs for debug/indication.
• Four user configurable push buttons.
For applications such as air conditioners (outdoor fan motor) where the main control
unit needs the information of the fan speed, the board features 15V level non-isolated
FG signal which can be used to generate a pulsed signal proportional to the motor
speed. There is also an isolated user-interface consisting of four push buttons and a
5V logic level communication interface. The push buttons can be programmed in the
firmware for various functions, such as command input and debugging. The tempera-
ture sensor of the IPM is connected to one of the analog inputs of
dsPIC33EP64MC206.
page 10 2017 Microchip Technology Inc.
Introduction
The Low Power High Voltage Motor Control Board is capable of operating from 90 VAC
up to a maximum of 230 VAC. The power ratings of the board provided in Table 1-1.
TABLE 1-1: ELECTRICAL SPECIFICATIONS
Parameter Operating Range
Input AC Voltage 90 VAC-230 VAC, 50/60 Hz
Maximum input Current 1.5A (RMS)
Continuous Active Power at 230 VAC, 25°C 150W(1)
Active Power at 230 VAC, 25°C 150W for 8 min(2)
Auxiliary 15V Output Power 5W max
Auxiliary 3.3V Output Power 1.8W max
Auxiliary 5V (isolated) Output Power 0.8W max
Note 1: When the board is operated without enclosure in free air at 25°C with an
over-temperature trip limit of 80°C (IPM case temperature).
2: When the board is operated inside the enclosure with an over-temperature trip limit
of 80°C (IPM case temperature). Figure 1-3 shows a typical temperature rise for
the board at different power levels.
FIGURE 1-3: IPM’s CASE TEMPERATURE RISE AT DIFFERENT POWER
LEVELS
90
80
70
Temperature (°C)
60
50
100W
40
125W
30
150W
20
10
0
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Time in Minutes
2017 Microchip Technology Inc. page 11
Low Power High Voltage Motor Control Board User’s Guide
NOTES:
page 12 2017 Microchip Technology Inc.
LOW POWER HIGH VOLTAGE
MOTOR CONTROL BOARD
USER’S GUIDE
Chapter 2. Getting Started
2.1 INTRODUCTION
This chapter provides details of the input/output and other interfaces of the Low Power
High Voltage Motor Control Board. The input power for the board is passed through the
EMI filter section and then gets converted to DC using the rectifier. An auxiliary power
supply unit powers various integrated circuits of the board.
The outputs of the auxiliary power supply unit are:
• Non-isolated 15V - for the gate drive of the power module. 15V also decides the
level of the FG signal.
• Non-isolated 3.3V - to power logic level ICs and circuits including
dsPIC33EP64MC206.
• Isolated 5V - to power the external board interface circuitry.
2.2 BOARD LAYOUT
The Low Power High Voltage Motor Control Board has various sections which imple-
ment its salient features. They are marked in the Figure 2-1 and are detailed in
Table 2-1.
FIGURE 2-1: BOARD SECTIONS
12
4
3
5 11
1 10
7
13
6
9
2017 Microchip Technology Inc. page 13
Low Power High Voltage Motor Control Board User’s
TABLE 2-1: LOW POWER HIGH VOLTAGE MOTOR CONTROL BOARD
SECTIONS
Section
Description
Number
1 MOV, fuse, EMI filter, inrush current limiter and bleeder resistor
2 Rectifier and DC bus capacitor
3 Flyback converter with 3 outputs: 15V (regulated), 4.2V (unregulated) and
5V (unregulated and isolated)
4 Bulk capacitors and EMI filter for 15V, 3.3V and 5V (isolated) output
LDO to convert 4.2V input to 3.3V output
5 3-phase power module (bottom side of the board)
6 Shunts for DC bus and 2-phase current measurement
7 Resistors for back EMF sensing and diodes for over voltage protection
8 3 green LED and 1 red LED for debug purpose
9 1.65V reference voltage generator
10 dsPIC33EP64MC206 with internal operational amplifier
11 Isolated user interface
12 Transistor to buffer the 15V - FG signal coming from the microcontroller output
13 Resistors for biasing current sensing internal OpAmp, capacitors for decoupling
2.3 USER INTERFACE
This section describes various interfaces of the Low Power High Voltage Motor Control
Board.
2.3.1 Power Supply Connector
The connector J1 provides the input power to the board. AC power input is specified
for 90 VAC-230 VAC, 3 Amps max. The connector is shown in Figure 2-2 and the
connection details are provided in Table 2-2.
FIGURE 2-2: POWER SUPPLY CONNECTOR
1 2 3
TABLE 2-2: CONNECTOR J1
Number Name
1 Live
2 Earth
3 Neutral
page 14 2017 Microchip Technology Inc.
Getting Started
The user may consider the following guidelines in selecting the right cable for the
board.
• It is recommended that cables used for the power connections should be termi-
nated with insulated crimp terminals. If crimp terminals are not used, care should
be taken to ensure that stray strands of wire do not short to adjacent terminals. If
possible, all wires should be stripped and tinned with solder before connecting to
the Low Power High Voltage Motor Control Board terminals.
• For the AC mains supply input, standard double-insulated, 3-core flex cable
should be used with a minimum current rating of 3A.
• The recommended output cable size is 1.0 mm2 to 1.5 mm2 (18 AWG-16 AWG)
and it should have a rating of 600V. This cable should also be double insulated or
have a protective ground screen. Access to the terminal screws is provided via
holes in the lid of the enclosure. A slotted screwdriver should be used.
Note: The user should only access the power terminals when the system is fully
discharged (See “Safety Notice” on page 3.).
2.3.2 Motor Power Connectors
The output of 3-phase motor control power stage is available through the connector J2.
Connect the motor phase windings to the connector terminals U, V and W. Motor chas-
sis can be connected to the terminal E of the connector. Refer to Figure 2-3 and
Table 2-3 for details about the connectors.
FIGURE 2-3: MOTOR CONNECTOR
1 2 3 4
TABLE 2-3: CONNECTOR J2
Number Name
1 Motor Earth
2 Phase W
3 Phase V
4 Phase U
2.3.3 Hall Sensor/Quadrature Encoder Interface (QEI)
Hall sensors or Quadrature encoder for sensored motor control algorithms can be inter-
faced using the connector J5. The connector provides 3.3V to power the motor sensor
circuitry, and also provides a 15V level pulse output which can be configured in the firm-
ware to output speed information. This is generally called FG Signal and is used in fan
applications.
CAUTION
All the terminals on this connector are non-isolated.
2017 Microchip Technology Inc. page 15
Low Power High Voltage Motor Control Board User’s
FIGURE 2-4: HALL/QEI
1 2 3 4 5 6
TABLE 2-4: CONNECTOR J5
Number Name Port Pin
1 Ground NA
2 3.3V NA
3 Hall C/Index RP54/RC6
4 Hall B/QEB RP41/RB9
5 Hall A/QEA RP40/RB8
6 FG Signal RP55/RC7
2.3.4 Program/Debug Connector
The dsPIC33EP64MC206 microcontroller on the Low Power High Voltage Motor Con-
trol Board has a non-isolated ICSP™ programming/debugging connector J3 which can
be used to interface with a programmer/debugger available from Microchip.
FIGURE 2-5: PROGRAM/DEBUG CONNECTOR
The first pin MCLR (marked as “M”) can be used to correct the orientation of the pro-
grammer when interfacing with the board. For detailed information on how to program
the microcontroller, refer to Section 3.1.2 “Programming”.
CAUTION
Since the program/debug connector is non-isolated care should be taken while pro-
gramming/debugging the target. Following are some of the suggested ways to pro-
gram/debug the target.
1. Use an isolation transformer to power the board and operate the computer on
battery.
2. Use a USB-isolator (KXUSB-150) to isolate the programmer/debugger.
3. If there is no need for debugging, the user may use ICD3 or PICKIT3 to program the
target as described in Section 3.1.2.1 “Programming using MPLAB® ICD3 or PICkit 3”.
2.3.5 Debug LEDs
The board features four LEDs (three green and one red) for debug/indication. These
are user configurable in the firmware. The port pins of the dsPIC33EP64MC206
connecting to these LEDs are provided in the Table 2-5.
FIGURE 2-6: LEDS
page 16 2017 Microchip Technology Inc.
Getting Started
TABLE 2-5: LEDS – PORT PIN MAPPING
LED Port Pin
LD2 RC5
LD3 RC4
LD4 RC3
LD5 RA9
2.3.6 Communication Interface
The Low Power High Voltage Motor Control Board provides an isolated communication
interface using the connector J4 to communicate with the host PC. The signals RX/TX
are 5V logic level.
FIGURE 2-7: COMMUNICATION INTERFACE
1 2345
TABLE 2-6: COMMUNICATION INTERFACE
Number Name Port Pin
1 5V (isolated) NA
2 RX (isolated data-in) RP56/RC8
3 TX (isolated data-out) RP57/RC9
4 GND (isolated) NA
5 Not Connected NA
2.3.6.1 COMMUNICATION USE CASE
This section describes how connector J4 can be used to establish UART-based com-
munication. Figure 2-8 shows usage of an MCP2200 breakout module (Part Number:
ADM00393) as a UART-USB bridge between the Low Power High Voltage Motor Con-
trol Board and the host PC through connector J4. The MCP2200 breakout module is a
development and evaluation platform for the MCP2200 USB-to-UART (Universal Serial
Bus-to-Universal Asynchronous Receiver/Transmitter) serial converter.
FIGURE 2-8: INTERFACING MCP2200 BREAKOUT MODULE
2017 Microchip Technology Inc. page 17
Low Power High Voltage Motor Control Board User’s
FIGURE 2-9: MCP2200 BREAKOUT MODULE
Note: Similarly, other serial communication adapters can be used with the Low
Power High Voltage Motor Control Board.
2.3.7 Push Buttons
The board has four isolated input push buttons, namely SW1 to SW4. The buttons are
reconfigurable in the firmware and can be used for various operations such as start,
stop, increase or decrease in speed and so on. For further details, refer to Figure 2-10
and Table 2-7.
FIGURE 2-10: PUSH BUTTONS
1 2 3 4
TABLE 2-7: PUSH BUTTON – PORT PIN MAPPING
Number Name Port Pin
1 SW1 RD8
2 SW2 RC10
3 SW3 RB7
4 SW4 RC13
page 18 2017 Microchip Technology Inc.
LOW POWER HIGH VOLTAGE
MOTOR CONTROL BOARD
USER’S GUIDE
Chapter 3. Hardware
3.1 HARDWARE SETUP
In this chapter the procedures provided in the following sections enable a sensorless
FOC algorithm to run on the Low Power High Voltage Motor Control Board.
CAUTION
The user must be aware of the operating procedures outlined in this chapter and
ensure that they are executed accordingly. Failure to do so may result in damage to the
system.
3.1.1 Basic Evaluation
Execute the following procedure to ensure that the input power/auxiliary power supply
unit is working as expected.
1. Ensure that there is no power on the Low Power High Voltage Motor Control
Board and then setup the following connections:
a) Connector J1: Connect live, neutral and earth of AC mains, as marked on
the board.
b) Connector J2: Connect the 3-phase wires of motor.
2. Power the board with AC mains or an AC power supply (90 VAC-230 VAC,
50/60 Hz).
3. Ensure red LED LD1 (right-top corner) glows after the board is powered on.
4. Switch off the input power and wait till the LED LD1 goes off.
3.1.2 Programming
Execute the following steps to set up the programming tool:
1. Ensure that there is no power on the Low Power High Voltage Motor Control
Board and then remove the enclosure to access the programming interface.
2. Mount the RJ11 to ICSP™ adapter matching the MCLR (marked as “M”) pin.
Refer to Figure 3-1 for correct orientation.
FIGURE 3-1: ICSP™ ADAPTER ORIENTATION
The dsPIC33EP64MC206 on the Low Power High Voltage Motor Control Board can be
programmed in two ways which are explained in the following sections.
2017 Microchip Technology Inc. page 19
Low Power High Voltage Motor Control Board User’s Guide
3.1.2.1 PROGRAMMING USING MPLAB® ICD3 OR PICKIT 3
The dsPIC33EP64MC206 on the Low Power High Voltage Motor Control Board can be
programmed using an MPLAB ICD3 or PICkit 3 without the need to power the board
from the mains supply.
Execute the following procedure to power the target circuit using the selected tool:
1. Open the Project Properties window
2. In the Categories panel on the left of the window, select the tool (ICD3 or PICkit
3)
3. In the Option categories drop-down menu, select Power
4. Check the box next to the Power target circuit from IDC3 field
5. For the Voltage Level drop-down menu, select 3.25
FIGURE 3-2: PROGRAMMING USING ICD3 OR PICKIT 3
6. Program the microcontroller with the given firmware as described in
Section 4.2 “Software Setup and Run”.
3.1.2.2 PROGRAMMING USING MPLAB REAL ICE™
As MPLAB REAL ICE does not have an option to power the target circuit, the Low
Power High Voltage Motor Control Board needs to be powered by AC mains. The
device, dsPIC33EP64MC206, can be programmed by executing the procedure given
in Section 4.2 “Software Setup and Run”.
CAUTION
Since the programming interface on Low Power High Voltage Motor Control Board is
non-isolated, care should be taken while programming.
page 20 2017 Microchip Technology Inc.
LOW POWER HIGH VOLTAGE
MOTOR CONTROL BOARD
USER’S GUIDE
Chapter 4. Running the Demonstration
This chapter describes how to set up the Low Power High Voltage Motor Control Board
for 3-phase motor control using the application firmware “Sensorless Field Oriented
Control” from Microchip.
4.1 DEMONSTRATION REQUIREMENTS
The version of the MPLAB® IDE and MPLAB XC compiler used are:
• MPLAB X IDE v3.40 or later
• MPLAB XC16 v1.26 or later
The following are the hardware used:
• Low Power High Voltage Motor Control Board
• 220V PMSM/BLDC (Part # 80-252140-220, Beijing Eletechnic Ltd.)
• RJ11 to ICSP™ adapter (AC164110)
• MPLAB ICD 3 In-Circuit Debugger (DV164035) or PICkit 3 In-Circuit Debugger
(PG164130)
4.2 SOFTWARE SETUP AND RUN
4.2.1 Basic Demonstration
This section demonstrates a procedure to run the motor using the push buttons.
Note 1: The firmware supplied is already configured for enabling the basic
demonstration.
2: If both MPLAB X IDE and MPLAB IDE are used, ensure that the program-
mer/debugger is set to run on the MPLAB X IDE. To set this, the user
must run the MPLAB driver switcher, for Microsoft Windows the user
must run the driver switcher as Administrator.
Execute the following procedure to run the motor using a push button (SW1) and vary
the speed of the motor using another set of push buttons (SW2 and SW3):
1. Start MPLAB X IDE and open the LPHV_MTR80.X workspace.
2017 Microchip Technology Inc. page 21
Low Power High Voltage Motor Control Board User’s Guide
Note: It is recommended to use MPLAB X v3.40 or later with compiler XC16 v1.26
or later.
2. Set LPHV_MTR80.X as main project and Build the project by selecting the Clean
and Build Main Project button available either on the toolbar or in the Run
menu.
3. After a successful build, download the code to dsPIC33EP64MC206 on the Low
Power High Voltage Motor Control Board by selecting the Make and Program
the device main project button on the toolbar.
Refer to Section 3.1.2 “Programming” for information to setup the program-
ming tool.
4. Disconnect the programmer from the board before proceeding to operate.
CAUTION
Failure to disconnect the programmer/debugger before proceeding to operate the
board cause potential damage to the programmer/debugger or the board or the user's
computer.
Ensure that the power to the board is turned on.
5. Press SW1 to start the motor (SW1 is configured to start and stop the motor).
The motor starts running (500 RPM) and the corresponding LEDs will glow as
described in the Table 4-1.
page 22 2017 Microchip Technology Inc.
Running the Demo
6. Press SW2 to increase the speed or SW3 to decrease the speed. The increase
or decrease in speed is indicated by a series of LEDs as described in Table 4-1.
Ensure that the speed of the motor stabilizes before the next press of SW2 or
SW3.
TABLE 4-1: SPEED PATTERN
Speed (RPM) LD5 LD4 LD3
500 OFF OFF ON
1000 OFF ON OFF
1500 OFF ON ON
2000 ON OFF OFF
2300 ON OFF ON
2500 OFF ON ON
3000 ON ON ON
Note: If the temperature of the IPM increases due to continuous operation, the con-
troller shuts down the motor at 80°C (user configurable) and turns on the red
LED LD2 indicating a fault. The board can be restarted when the temperature
comes down to 30°C (user configurable) and the LED LD2 turns off indicating
that the board is ready for operation. Refer to Table 1-1 for the power rating
of the board.
2017 Microchip Technology Inc. page 23
Low Power High Voltage Motor Control Board User’s Guide
NOTES:
page 24 2017 Microchip Technology Inc.
LOW POWER HIGH VOLTAGE
MOTOR CONTROL BOARD
USER’S GUIDE
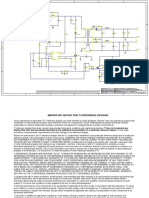
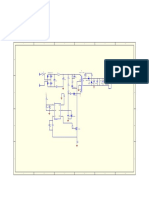
Appendix A. Board Schematics and Layout
A.1 BOARD SCHEMATICS AND LAYOUT
This appendix displays the following schematics and layout:
• Figure A-1: “Low Power High Voltage Motor Control Board Schematic
(Sheet 1 of 2)”
• Figure A-2: “Low Power High Voltage Motor Control Board Schematic
(Sheet 2 of 2)”
• Figure A-3: “Low Power High Voltage Motor Control Board Component Lay-
out - Top Layer”
• Figure A-4: “Low Power High Voltage Motor Control Board Component Lay-
out - Bottom Layer”
• Figure A-5: “Low Power High Voltage Motor Control Board Signal Layer -
Top”
• Figure A-6: “Low Power High Voltage Motor Control Board Signal Layer -
Bottom”
2017 Microchip Technology Inc. page 25
FIGURE A-1: LOW POWER HIGH VOLTAGE MOTOR CONTROL BOARD SCHEMATIC (SHEET 1 of 2)
page 26
Low Power High Voltage Motor Control Board User’s Guide
TP124
R4 18R C11
560pF ISO_5V
0215005.MXESPP NTC1 DC+
L1 3.3μH R96
750343319 D4
F1 0R
B57235S100M 1 TX1 13 C13
R2 D2 SB180 100μF TP25
2
L2 C5 D1 2.43M C12 D3.3V
TERMINAL 1x3
C1 470μF ISO_GND A3.3V D3.3V
J1 4700pF
͟͟
P6KE130A 15V
C8 C9 12
1 2 1 4700pF
C4 400V D5 R97
2 VR1 4 1 C7 10 SB1100-T TP26
C3 0.33μF 2200pF 2.2μF R3
3 350V R1 220μF
2.43M
D3 R5 27R C15 L3 3.3μH 0R
R98 R99
3 4 450V 1N4937 C14 390pF 0R 0R
0.33μF 2 330μF C16 4.2V
E_GND 744841330 470k
U2 TNY288PG D6 100μF U4 L4 R9
3
8 SB150-E3/73 1 3 2.2k
E_GND C6 8 1 Vin
C2 S EN
EN/UV
EN/UV Vout
L5 3.3μH 10μH
D
GND
GBJ1506-FDI-ND 7 2 9 R6 18R C17
4700pF
Tab
GN
4700pF S BP/M
/ 560pF C20
G
DC- C21 C22
680μF
6 C10 C19
S C18 10μF 10μF
5 4 100μF 1μF
L6
2
4
S D LD1
2200pF GREEN
TC1262-3.3VDB 10μH
D_GND C23 U3
0.10μF 4 1 R7 680R
3 2 R8 D_GND A_GND D_GND
1k D7
R43 LTV-817A
MCLR U1 13V
470R
D3.3V D3.3V D3.3V D3.3V A3.3V 7 13
MCLR MCLR AN0/OA2OUT/RA0 AN0/OA2OUT C71
D3.3V 14
AN1/C2IN1+/RA1 AN1/C2IN1+
R44 56 33
J3 VCAP CVREF2O/SDO1/RP20/T1CK/RA4 CVREF2O 15V C501uF
1
TDI/RA7 R33 470R
4.7k 10 34 3.3μF
1 2 3 4 5
C25 26 VDD SDI1/RPI25/RA9 64 LED3 TP13 PWM1H
C43 C72
VDD TDO/RA10
38 12 R95 1uF
C24 C26 C27 VDD AN9/RPI27/RA11 VA TP12
PGED 10uF 57 11 0.1uF
0.1uF VDD AN10/RPI28/RA12 VB
PGEC 19 4.7k C44 C51
C28 C29 AVDD R94 3.3μF
0.1uF 15
HDR-2.54 Male 1x5 0.1uF C30 PGED3/VREF-/AN2/C2IN1-/SS1/RPI32/CTED2/RB0 AN2/C2IN1- D_GND 1uF U5
9 16 C45
VSS PGEC3/VREF+/AN3/OA1OUT/RPI33/CTED1/RB1 AN3/OA1OUT 4.7k 1 17 V
0.1uF 0.1uF 25 17 COM P DC+
D_GND 0.1uF VSS PGEC1/AN4/C1IN1+/RPI34/RB2 AN4/C1IN1+ 2
41 18 PWM1L 10μF VB(U) U
VSS PGED1/AN5/C1IN1-/RP35/RB3 AN5/C1IN1- 3 DC-
D_GND 20 43 R34 470R VCC(U)
AVSS PGED2/ASDA2/RP37/RB5 PGED 4 18 J2
TERMINAL 1x4
D_GND 44 IN (UH) U, Vs(u)
PGEC2/ASCL2/RP38/RB6 PGEC 5
46 IN (UL)
1 2 3 4
D_GND RP39/INT0/RB7 Switch3 6
TP1 53 48 PWM2H C46 NC
A_GND 54 RD5 TCK/CVREF1O/ASCL1/RP40/T4CK/RB8 49 HA/QEA R93 R35 470R 7
VB(V) Nu
19
IA+
TP2 RD6 TMS/ASDA1/RP41/RB9(4) HB/QEB 1uF 8
42 60 VCC(V) 20
Switch1 RD8 RP42/PWM3H/RB10 PWM3H 9 Nv IB+
61
RP43/PWM3L/RB11 PWM3L R92 4.7k 10
IN (VH)
21 IBUS-
27 62 IN (VL) V, Vs(v)
Temp AN12/C2IN2-(3)/U2RTS/BCLK2/RE12 RPI44/PWM2H/RB12 PWM2H D_GND 11 R40 R41
C31 28 63 C47 VTS R42
VBus AN13/C3IN2-(3)/U2CTS/RE13 RPI45/PWM2L/CTPLS/RB13 PWM2L 4.7k R36 470R 12 0.1R 0.1R E_GND
29 2 V B(W) 0.1R
A_GND AN7/C3IN1- NEUT 30 AN14/RPI94/RE14 RPI46/PWM1H/T3CK/RB14 3 PWM1H PWM2L 0.1uF 13
V CC(W) 22
470pF TP3 AN15/RPI95/RE15 RPI47/PWM1L/T5CK/RB15 PWM1L 14 Nw IBUS+
PWM3H IN (WH)
R10 R12 R14 R37 470R 15 W
58 21 IN (WL)
IBUS+ AN6/OA3OUT TP4 RPI96/RF0 AN6/OA3OUT/C4IN1+/OCFB/RC0 AN6/OA3OUT R91 16 23
59 22 NC W, Vs(w)
1k 1k 20K TP5 RP97/RF1 AN7/C3IN1-/C4IN1-/RC1 AN7/C3IN1- C48
C32 TP20 31 23
TP6 SDA2/RPI24/RA8 AN8/C3IN1+/U1RTS/BCLK1/FLT3/RC2 AN8/C3IN1+ 4.7k FSB50660SF
1000pF TP7 32 36 R90 1uF
FLT32/SCL2/RP36/RB4 SDA1/RPI52/RC4 LED1
35 37 C49 C52
R11 R13 R15 LED2 SCK1/RPI51/RC3 SCL1/RPI53/RC5 Fault D_GND 3.3μF
50 4.7k
IB+ VREF RP54/RC6 HC/INDX
4 51 PWM3L 0.1uF
1k 1k 20K TP8 RP118/RG6 RP55/RC7 PULSE C73
C33 5 52 R38 470R
TP9 RPI119/RG7 RP56/RC8 TX
AN8/C3IN1+ 6 55 1uF
A_GND TP10 RP120/RG8 RP57/RC9 RX
8 45 Temp
470pF TP11 RPI121/RG9 RPI58/RC10 Switch2
24
AN11/C1IN2-(3)/U1CTS/FLT4/RC11 VC
39
OSC1/CLKI/RC12
47 C70
RC13 Switch4
40 0.1uF
OSC2/CLKO/RC15
Y1
C34 dsPIC33EP64MC206
2017 Microchip Technology Inc.
A_GND D_GND D_GND
AN2/C2IN1- C37
8MHz (DNP)
470pF
R16 R18 R20 A_GND C68 C69
AN5/C1IN1-
IBUS+ AN0/OA2OUT 470pF 33pF (DNP) 33pF (DNP)
R22 R24 R26
1k 1k 20K
C35 TP21 IBUS- AN3/OA1OUT
1000pF 1k 1k 20K
C38 TP22
R17 R19 R21 1000pF
AN4/C1IN1+
IA+ VREF
R23 R25 R27 R28 D_GND PWM1H TP14
1k 1k 20K
C36 IBUS+ VREF
PWM1L TP15
AN1/C2IN1+ 1k 1k 560R 62k
A_GND C39 TP23 PWM2H TP16
470pF A_GND R29
56k PWM2L TP17
470pF
PWM3H TP18
PWM3L TP19
A_GND
FIGURE A-2: LOW POWER HIGH VOLTAGE MOTOR CONTROL BOARD SCHEMATIC (SHEET 2 of 2)
2017 Microchip Technology Inc.
15V
D3.3V ISO_5V
ISO_5V D3.3V
D3.3V ISO_5V
A3.3V
R62
10k R75 R77
R64 U6 R76 R78
J4 4.7k 4.7k
D8 FG 8 1 1k 1k
2 VDD2V
VDD2VDD1
V
R46 R47 R48 3 100R 7 2
1 2 3 4 5
3 R63 VIA VOA RX C63 U11 U8
DC+ VBUS 1 Q1 C62 6 3 4 1 4 1
1 PULSE VOB VIB TX 0.1uF Switch1 Switch2
150k 150k 300R MMBT2222A-7-F 0.1uF 5 4
1k GND2
G
GND2G
GND1
GN
G D1 3 2 3 2
BAR43S R65 2
FOD8012
C54 R49 100k LTV-817A LTV-817A
2.2k HDR-2.54 Male 1x5 D_GND D_GND
1 SW1 1 SW2
4700pF
4 4
D_GND 2 3 2 3
TACT SPST TACT SPST
D_GND
C64 C65
ISO_GND
A_GND
0.1uF 0.1uF
ISO_GND ISO_GND
A3.3V
ISO_5V
D3.3V D3.3V ISO_5V
D9
2
R50 R51 R52 R79
LED1
LED2
LED3
Fault
3 R80 R81
U
1
VA 4.7k R82
150k 150k 300R A3.3V 1k 4.7k
CVREF2O 1k
BAR43S A_GND U9
R53 4 1 U10
2
C55 4 U7 Switch3 4 1
2.2k R83 R84 R85 R86 R30 R31 Vin-
in- Switch4
4700pF MCP6001 3 2
2.2k 2.2k 2.2k 2.2k 0R (DNP) 10k VSS
S
1 3 2
VOUT
T VREF
VDD
V
VDD LTV-817A
3 D_GND LTV-817A
Vin+
in+ 1 SW3 D_GND
1 SW4
A3.3V 4
4
5
RED GREEN GREEN GREEN C40
A_GND
LD2 LD3 LD4 LD5 0.1uF R32 2 3
10k A3.3V TACT SPST 2 TACT SPST 3
C41
C66
0.1uF C67
A3.3V 0.1uF
0.1uF
A_GND
A_GND ISO_GND ISO_GND
D10 D_GND D_GND D_GND D_GND
2
R54 R55 R56
3
V VB
1
150k 150k 300R
BAR43S D3.3V
C56 R57
2.2k R87
4700pF
VA
R71 10k
R69 R70
FG R88
4.7k 4.7k 4.7k VB NEUT
D3.3V
R66 J5 10k
A_GND
HA/QEA 1
R89
47k R67 2 VC
3
HB/QEB 10k
A3.3V 4
47k
R68 5
HC/INDX 6
47k
D11 C61
Appendix A
2 0.1uF
R58 R59 R60
3
W VC
1
150k 150k 300R
R72 C58 R74 C60
BAR43S R73 C59
90.9k 90.9k
1000pF 90.9k 1000pF
C57 R61 1000pF D_GND
2.2k
4700pF
D_GND D_GND D_GND
A_GND
page 27
Low Power High Voltage Motor Control Board User’s Guide
FIGURE A-3: LOW POWER HIGH VOLTAGE MOTOR CONTROL BOARD
COMPONENT LAYOUT - TOP LAYER
page 28 2017 Microchip Technology Inc.
Appendix A
FIGURE A-4: LOW POWER HIGH VOLTAGE MOTOR CONTROL BOARD
COMPONENT LAYOUT - BOTTOM LAYER
2017 Microchip Technology Inc. page 29
Low Power High Voltage Motor Control Board User’s Guide
FIGURE A-5: LOW POWER HIGH VOLTAGE MOTOR CONTROL BOARD
SIGNAL LAYER - TOP
page 30 2017 Microchip Technology Inc.
Appendix A
FIGURE A-6: LOW POWER HIGH VOLTAGE MOTOR CONTROL BOARD
SIGNAL LAYER - BOTTOM
2017 Microchip Technology Inc. page 31
Low Power High Voltage Motor Control Board User’s Guide
NOTES:
page 32 2017 Microchip Technology Inc.
LOW POWER HIGH VOLTAGE
MOTOR CONTROL BOARD
USER’S GUIDE
Appendix B. Power Rating of Inverter or
Integrated Power Module (IPM)
B.1 INTRODUCTION
In this appendix the following topics in reference to the Low Power High Voltage Motor
Control Board are discussed:
• Causes for higher power loss in the inverter while delivering reactive power.
• Power rating when it is measured at the input (AC mains) to the board.
• A scenario when the de-rating of the inverter occurs.
B.2 POWER LOSS
The loss in the IPM (or inverter) are of two types:
a) Power loss due to switching
Since the demo software runs the PWM at 20 kHz, which is the optimum switch-
ing frequency recommended by the IPM manufacturer, the power loss due to
switching is insignificant when compared with power loss due to conduction.
b) Power loss during conduction
This is caused when:
- The current from DC bus to load generates heat in the MOSFET (I2R loss due
to RDS(on)).
- The recirculating current between IPM and load, due to reactive power, gener-
ates heat due to forward voltage drop (V x I loss) in the intrinsic diode of the
MOSFET. When MOSFETs are not turned on, recirculating current will cause
significant loss due to diode drop as compared to the loss due to RDS(on).
B.2.1 Power Loss Scenario
In a motor control application, field weakening is a typical case when there is significant recir-
culating current flowing between the motor and IPM. As a result, the temperature rise in the
IPM will be significantly faster. Even though the board draws low input power from AC mains,
there can be significant recirculating current between the motor and IPM and it will not be
seen in the input power.
Since the IPM (or inverter) can supply both active and reactive power, rating of the inverter
(similarly in transformers and alternators) is best specified in Volts-Amps (VA), instead of
Watts (W). But in case of motor drives, where both voltage and current varies, it can be cum-
bersome to measure the 3-phase output power of the inverter. Hence, for simplification, the
active power rating of the inverter is specified in W, when the inverter supplies active power
only (refer Table 1-1). If there is reactive power flow between the inverter and motor, de-rat-
ing of the inverter occurs, that is, the IPM heats up faster in the presence of reactive power.
2017 Microchip Technology Inc. page 33
Low Power High Voltage Motor Control Board User’s Guide
NOTES:
page 34 2017 Microchip Technology Inc.
Worldwide Sales and Service
AMERICAS ASIA/PACIFIC ASIA/PACIFIC EUROPE
Corporate Office Asia Pacific Office China - Xiamen Austria - Wels
2355 West Chandler Blvd. Suites 3707-14, 37th Floor Tel: 86-592-2388138 Tel: 43-7242-2244-39
Chandler, AZ 85224-6199 Tower 6, The Gateway Fax: 86-592-2388130 Fax: 43-7242-2244-393
Tel: 480-792-7200 Harbour City, Kowloon China - Zhuhai Denmark - Copenhagen
Fax: 480-792-7277 Hong Kong Tel: 86-756-3210040 Tel: 45-4450-2828
Technical Support: Tel: 852-2943-5100 Fax: 86-756-3210049 Fax: 45-4485-2829
http://www.microchip.com/ Fax: 852-2401-3431 India - Bangalore Finland - Espoo
support
Australia - Sydney Tel: 91-80-3090-4444 Tel: 358-9-4520-820
Web Address: Tel: 61-2-9868-6733 Fax: 91-80-3090-4123 France - Paris
www.microchip.com Fax: 61-2-9868-6755 India - New Delhi Tel: 33-1-69-53-63-20
Atlanta Tel: 91-11-4160-8631 Fax: 33-1-69-30-90-79
China - Beijing
Duluth, GA Tel: 86-10-8569-7000 Fax: 91-11-4160-8632 France - Saint Cloud
Tel: 678-957-9614 Fax: 86-10-8528-2104 India - Pune Tel: 33-1-30-60-70-00
Fax: 678-957-1455
China - Chengdu Tel: 91-20-3019-1500 Germany - Garching
Austin, TX Tel: 86-28-8665-5511 Japan - Osaka Tel: 49-8931-9700
Tel: 512-257-3370 Fax: 86-28-8665-7889 Tel: 81-6-6152-7160 Germany - Haan
Boston Fax: 81-6-6152-9310 Tel: 49-2129-3766400
China - Chongqing
Westborough, MA Tel: 86-23-8980-9588 Japan - Tokyo Germany - Heilbronn
Tel: 774-760-0087 Fax: 86-23-8980-9500 Tel: 81-3-6880- 3770 Tel: 49-7131-67-3636
Fax: 774-760-0088
China - Dongguan Fax: 81-3-6880-3771 Germany - Karlsruhe
Chicago Tel: 86-769-8702-9880 Korea - Daegu Tel: 49-721-625370
Itasca, IL
China - Guangzhou Tel: 82-53-744-4301 Germany - Munich
Tel: 630-285-0071
Tel: 86-20-8755-8029 Fax: 82-53-744-4302 Tel: 49-89-627-144-0
Fax: 630-285-0075
China - Hangzhou Korea - Seoul Fax: 49-89-627-144-44
Dallas
Tel: 86-571-8792-8115 Tel: 82-2-554-7200 Germany - Rosenheim
Addison, TX
Fax: 86-571-8792-8116 Fax: 82-2-558-5932 or Tel: 49-8031-354-560
Tel: 972-818-7423
China - Hong Kong SAR 82-2-558-5934
Fax: 972-818-2924 Israel - Ra’anana
Tel: 852-2943-5100 Malaysia - Kuala Lumpur Tel: 972-9-744-7705
Detroit
Fax: 852-2401-3431 Tel: 60-3-6201-9857
Novi, MI Italy - Milan
China - Nanjing Fax: 60-3-6201-9859
Tel: 248-848-4000 Tel: 39-0331-742611
Tel: 86-25-8473-2460 Malaysia - Penang Fax: 39-0331-466781
Houston, TX
Fax: 86-25-8473-2470 Tel: 60-4-227-8870
Tel: 281-894-5983 Italy - Padova
China - Qingdao Fax: 60-4-227-4068
Indianapolis Tel: 39-049-7625286
Tel: 86-532-8502-7355 Philippines - Manila
Noblesville, IN Netherlands - Drunen
Fax: 86-532-8502-7205 Tel: 63-2-634-9065
Tel: 317-773-8323 Tel: 31-416-690399
China - Shanghai Fax: 63-2-634-9069
Fax: 317-773-5453 Fax: 31-416-690340
Tel: 317-536-2380 Tel: 86-21-3326-8000 Singapore Norway - Trondheim
Fax: 86-21-3326-8021 Tel: 65-6334-8870
Los Angeles Tel: 47-7289-7561
China - Shenyang Fax: 65-6334-8850
Mission Viejo, CA Poland - Warsaw
Tel: 949-462-9523 Tel: 86-24-2334-2829 Taiwan - Hsin Chu Tel: 48-22-3325737
Fax: 949-462-9608 Fax: 86-24-2334-2393 Tel: 886-3-5778-366
Fax: 886-3-5770-955 Romania - Bucharest
Tel: 951-273-7800 China - Shenzhen
Tel: 40-21-407-87-50
Raleigh, NC Tel: 86-755-8864-2200 Taiwan - Kaohsiung
Tel: 919-844-7510 Fax: 86-755-8203-1760 Tel: 886-7-213-7830 Spain - Madrid
Tel: 34-91-708-08-90
New York, NY China - Wuhan Taiwan - Taipei
Fax: 34-91-708-08-91
Tel: 631-435-6000 Tel: 86-27-5980-5300 Tel: 886-2-2508-8600
Fax: 86-27-5980-5118 Fax: 886-2-2508-0102 Sweden - Gothenberg
San Jose, CA Tel: 46-31-704-60-40
Tel: 408-735-9110 China - Xian Thailand - Bangkok
Tel: 408-436-4270 Tel: 86-29-8833-7252 Tel: 66-2-694-1351 Sweden - Stockholm
Fax: 86-29-8833-7256 Fax: 66-2-694-1350 Tel: 46-8-5090-4654
Canada - Toronto
Tel: 905-695-1980 UK - Wokingham
Fax: 905-695-2078 Tel: 44-118-921-5800
Fax: 44-118-921-5820
page 35 2017 Microchip Technology Inc.
11/07/16
Low Power High Voltage Board User’s Guide
page 36 2017 Microchip Technology Inc.
You might also like
- MPLAB Real ICE Guia UsuarioDocument150 pagesMPLAB Real ICE Guia UsuarioJoseNo ratings yet
- XC16 Assem LKR Users GuideDocument275 pagesXC16 Assem LKR Users GuideLuis Di PintoNo ratings yet
- Mplab Pickit4 Debugger Ug Ds50002751aDocument93 pagesMplab Pickit4 Debugger Ug Ds50002751aJF MendozaNo ratings yet
- CSIII Model4310B User's Guide DS50003057Document49 pagesCSIII Model4310B User's Guide DS50003057Daniel MestradoUNBNo ratings yet
- Getting Started 8-Bit MCUs in MPLAB Xpress Ecosystem DS50002710Document53 pagesGetting Started 8-Bit MCUs in MPLAB Xpress Ecosystem DS50002710Jalea TerroristaNo ratings yet
- PLECS Model Quick Start Guide DS50002997ADocument37 pagesPLECS Model Quick Start Guide DS50002997Atakaca40No ratings yet
- PIC32MX470 Curiosity Development Board User's Guide: 2016-2017 Microchip Technology Inc. DS70005283BDocument30 pagesPIC32MX470 Curiosity Development Board User's Guide: 2016-2017 Microchip Technology Inc. DS70005283BJuan PachonNo ratings yet
- PICkit4 in Circuit DebuggerUG DS50002751BDocument93 pagesPICkit4 in Circuit DebuggerUG DS50002751Balexandresjr7No ratings yet
- Mplab XC16 C Compiler User's Guide: 2012-2020 Microchip Technology Inc. DS50002071KDocument399 pagesMplab XC16 C Compiler User's Guide: 2012-2020 Microchip Technology Inc. DS50002071KenglishzeghdarNo ratings yet
- XC16 Users GuideDocument399 pagesXC16 Users GuideLuis Di PintoNo ratings yet
- MPLABX 5.25 IPE User GuideDocument45 pagesMPLABX 5.25 IPE User GuideMarcelo Coronel CastromonteNo ratings yet
- Bootloader Generator User's Guide: 2015-2016 Microchip Technology Inc. DS40001779BDocument45 pagesBootloader Generator User's Guide: 2015-2016 Microchip Technology Inc. DS40001779BSharanu BasavaNo ratings yet
- MPLAB XC8 C Compiler User Guide For AVRDocument183 pagesMPLAB XC8 C Compiler User Guide For AVRdaviNo ratings yet
- IPE UserGuideDocument52 pagesIPE UserGuideLópez Santiago100% (1)
- RN2483 LoRa Technology Module Command Reference User Guide DS40001784GDocument64 pagesRN2483 LoRa Technology Module Command Reference User Guide DS40001784GВіталій ПузакNo ratings yet
- MPLAB XC16 C Compiler Users Guide DS50002071 PDFDocument413 pagesMPLAB XC16 C Compiler Users Guide DS50002071 PDFJuan Fabian MoralesNo ratings yet
- MPLAB PICkit 4 ICD Users Guide DS50002751CDocument93 pagesMPLAB PICkit 4 ICD Users Guide DS50002751CGuriya AhmedNo ratings yet
- Microchip 16 Bit Library ManualDocument262 pagesMicrochip 16 Bit Library ManualParth PandyaNo ratings yet
- 1.2 Curiosity-HPC-User-Guide - (FreeCourseWeb - Com)Document27 pages1.2 Curiosity-HPC-User-Guide - (FreeCourseWeb - Com)YOUSSEF EL MERABETNo ratings yet
- MCP16251 One-Cell Boost Converter With External UVLO Circuit Reference DesignDocument29 pagesMCP16251 One-Cell Boost Converter With External UVLO Circuit Reference DesignAnonymous TPVfFif6TONo ratings yet
- PIC16F882/883/884/886/887 Data SheetDocument22 pagesPIC16F882/883/884/886/887 Data SheetwayanwijaNo ratings yet
- ENC28J60 Data Sheet: Stand-Alone Ethernet Controller With SPI InterfaceDocument97 pagesENC28J60 Data Sheet: Stand-Alone Ethernet Controller With SPI InterfaceArtem 521No ratings yet
- PIC12F675Document128 pagesPIC12F675vincex977sNo ratings yet
- 12f683 PDFDocument176 pages12f683 PDFAndres GarciaNo ratings yet
- PIC16F887Document288 pagesPIC16F887montri_lpk1728No ratings yet
- MicroChip ManualDocument24 pagesMicroChip Manualms_geoNo ratings yet
- Pic16F883/884/886/887 Data Sheet: 28/40/44-Pin Enhanced Flash-Based, 8-Bit Cmos Microcontrollers With Nanowatt TechnologyDocument288 pagesPic16F883/884/886/887 Data Sheet: 28/40/44-Pin Enhanced Flash-Based, 8-Bit Cmos Microcontrollers With Nanowatt TechnologyDiego CbNo ratings yet
- Lorawan™ Library Plug-In For Mplab Code Configurator User'S GuideDocument101 pagesLorawan™ Library Plug-In For Mplab Code Configurator User'S GuideFernando NancoNo ratings yet
- Pic18F85J90 Family Data Sheet: 64/80-Pin, High-Performance Microcontrollers With LCD Driver and Nanowatt TechnologyDocument411 pagesPic18F85J90 Family Data Sheet: 64/80-Pin, High-Performance Microcontrollers With LCD Driver and Nanowatt TechnologyIrfan FaniNo ratings yet
- Microchip 8bit Mcu PIC Xpress Dev Board PIC16F1885-1591515Document32 pagesMicrochip 8bit Mcu PIC Xpress Dev Board PIC16F1885-1591515guerrecNo ratings yet
- PIC16F716Document136 pagesPIC16F716paulojfeitozaNo ratings yet
- MPLAB Mindi Getting StartedDocument24 pagesMPLAB Mindi Getting StartedСлободан Г.No ratings yet
- PIC16F628ADocument178 pagesPIC16F628AEmanuele100% (1)
- Picf 44 J 10Document358 pagesPicf 44 J 10Ciprian UngureanuNo ratings yet
- MDB User GuideDocument38 pagesMDB User GuideLópez SantiagoNo ratings yet
- Transition Socket 51194pDocument30 pagesTransition Socket 51194pGabor MalomsokiNo ratings yet
- PIC16F628ADocument182 pagesPIC16F628AVictor HelmerNo ratings yet
- Rn2483 Lora Technology Module Command Reference User'S GuideDocument57 pagesRn2483 Lora Technology Module Command Reference User'S GuideFernando NancoNo ratings yet
- Enc28j60 With Out WOLDocument98 pagesEnc28j60 With Out WOLManitNo ratings yet
- PIC18F2420/2520/4420/4520 Data SheetDocument392 pagesPIC18F2420/2520/4420/4520 Data SheetAnh Toàn NguyễnNo ratings yet
- PIC12F509Document106 pagesPIC12F509Chester LowreyNo ratings yet
- Data Sheet PIC18 PDFDocument483 pagesData Sheet PIC18 PDFHari PrasadNo ratings yet
- Pic18f45k80 PDFDocument628 pagesPic18f45k80 PDFArijit Roy ChowdhuryNo ratings yet
- Programming 8-bit PIC Microcontrollers in C: with Interactive Hardware SimulationFrom EverandProgramming 8-bit PIC Microcontrollers in C: with Interactive Hardware SimulationRating: 2.5 out of 5 stars2.5/5 (5)
- Embedded Systems Security: Practical Methods for Safe and Secure Software and Systems DevelopmentFrom EverandEmbedded Systems Security: Practical Methods for Safe and Secure Software and Systems DevelopmentRating: 4.5 out of 5 stars4.5/5 (2)
- Making PIC Microcontroller Instruments and ControllersFrom EverandMaking PIC Microcontroller Instruments and ControllersNo ratings yet
- Interfacing PIC Microcontrollers: Embedded Design by Interactive SimulationFrom EverandInterfacing PIC Microcontrollers: Embedded Design by Interactive SimulationNo ratings yet
- A DIY Smart Home Guide: Tools for Automating Your Home Monitoring and Security Using Arduino, ESP8266, and AndroidFrom EverandA DIY Smart Home Guide: Tools for Automating Your Home Monitoring and Security Using Arduino, ESP8266, and AndroidNo ratings yet
- High-Performance Embedded Computing: Applications in Cyber-Physical Systems and Mobile ComputingFrom EverandHigh-Performance Embedded Computing: Applications in Cyber-Physical Systems and Mobile ComputingNo ratings yet
- Programming and Customizing the PICAXE Microcontroller 2/EFrom EverandProgramming and Customizing the PICAXE Microcontroller 2/ERating: 4 out of 5 stars4/5 (1)
- Information Security of Intelligent Vehicles Communication: Overview, Perspectives, Challenges, and Possible SolutionsFrom EverandInformation Security of Intelligent Vehicles Communication: Overview, Perspectives, Challenges, and Possible SolutionsRating: 5 out of 5 stars5/5 (1)
- Industrial Network Security: Securing Critical Infrastructure Networks for Smart Grid, SCADA, and Other Industrial Control SystemsFrom EverandIndustrial Network Security: Securing Critical Infrastructure Networks for Smart Grid, SCADA, and Other Industrial Control SystemsRating: 4.5 out of 5 stars4.5/5 (5)
- The IoT Hacker's Handbook: A Practical Guide to Hacking the Internet of ThingsFrom EverandThe IoT Hacker's Handbook: A Practical Guide to Hacking the Internet of ThingsNo ratings yet
- Beginning e-Textile Development: Prototyping e-Textiles with Wearic Smart Textiles Kit and the BBC micro:bitFrom EverandBeginning e-Textile Development: Prototyping e-Textiles with Wearic Smart Textiles Kit and the BBC micro:bitNo ratings yet
- Programming and Customizing the Multicore Propeller Microcontroller: The Official GuideFrom EverandProgramming and Customizing the Multicore Propeller Microcontroller: The Official GuideRating: 3.5 out of 5 stars3.5/5 (2)
- Tidr 261Document5 pagesTidr 261jay lowkeyNo ratings yet
- Tidr 261Document5 pagesTidr 261jay lowkeyNo ratings yet
- Practical Feedback Loop Design Considerations For Flyback Converter Using UCC28740Document7 pagesPractical Feedback Loop Design Considerations For Flyback Converter Using UCC28740jay lowkeyNo ratings yet
- Slurat9 28600Document2 pagesSlurat9 28600jay lowkeyNo ratings yet
- Pirv102 Pirv302: Pil103 Pil104 Piu102Document2 pagesPirv102 Pirv302: Pil103 Pil104 Piu102jay lowkeyNo ratings yet
- Pir501 Pir502: DNP DNPDocument2 pagesPir501 Pir502: DNP DNPjay lowkeyNo ratings yet
- Smps Slur989Document2 pagesSmps Slur989jay lowkeyNo ratings yet
- PIQ102 PIQ103 PIQ102 PIQ103: Input FilterDocument2 pagesPIQ102 PIQ103 PIQ102 PIQ103: Input Filterjay lowkeyNo ratings yet
- PID103 PIT101 PIT102 PIT103 PIT104: I High Voltage I High Voltage I High VoltageDocument3 pagesPID103 PIT101 PIT102 PIT103 PIT104: I High Voltage I High Voltage I High Voltagejay lowkeyNo ratings yet
- Smps Slurap9Document2 pagesSmps Slurap9jay lowkeyNo ratings yet
- Circuit Design of Feedback Based On TL431 in Fly-Back ConverterDocument4 pagesCircuit Design of Feedback Based On TL431 in Fly-Back Converterjay lowkeyNo ratings yet
- Pid101 Pid201 Pid202: Pic101 Pic102 Pic201 Pic202 Pir102Document2 pagesPid101 Pid201 Pid202: Pic101 Pic102 Pic201 Pic202 Pir102jay lowkeyNo ratings yet
- Pid101 Pid201 Pid202: Pic101 Pic102 Pic201 Pic202 Pir102Document2 pagesPid101 Pid201 Pid202: Pic101 Pic102 Pic201 Pic202 Pir102jay lowkeyNo ratings yet
- 2.3V To 5.5V Micropower Bi-CMOS Op Amps: Features DescriptionDocument46 pages2.3V To 5.5V Micropower Bi-CMOS Op Amps: Features Descriptionjay lowkeyNo ratings yet
- Piecewise Linear Interpolation On PIC12/14/16 Series MicrocontrollersDocument8 pagesPiecewise Linear Interpolation On PIC12/14/16 Series Microcontrollersjay lowkeyNo ratings yet
- Smps 0load Tidrcz2Document2 pagesSmps 0load Tidrcz2jay lowkeyNo ratings yet
- Using The TL431 For Undervoltage and Overvoltage Detection: Application ReportDocument13 pagesUsing The TL431 For Undervoltage and Overvoltage Detection: Application ReportPERLUESNo ratings yet
- Is Now Part ofDocument17 pagesIs Now Part ofErasmo FrancoNo ratings yet
- Max Signal Properly TipsTrick Acq Analog Signals DS00004225Document21 pagesMax Signal Properly TipsTrick Acq Analog Signals DS00004225jay lowkeyNo ratings yet
- Microchip 8bit Mcu PIC Xpress Dev Board PIC16F1885-1591515Document32 pagesMicrochip 8bit Mcu PIC Xpress Dev Board PIC16F1885-1591515guerrecNo ratings yet
- Snva 850Document7 pagesSnva 850jay lowkeyNo ratings yet
- 0410 F.M. Dickey, S.C. Holswade Ed - Laser Beam Shaping Theory and Techniques - 2000Document427 pages0410 F.M. Dickey, S.C. Holswade Ed - Laser Beam Shaping Theory and Techniques - 2000jay lowkeyNo ratings yet
- Compal LA-6101PDocument48 pagesCompal LA-6101Pjay lowkeyNo ratings yet
- MCP1630 Low-Cost Li-Ion Battery Charger Reference Design User's GuideDocument24 pagesMCP1630 Low-Cost Li-Ion Battery Charger Reference Design User's Guidejay lowkeyNo ratings yet
- MCP2210 Breakout Module User's Guide: © 2012 Microchip Technology Inc. DS52056ADocument26 pagesMCP2210 Breakout Module User's Guide: © 2012 Microchip Technology Inc. DS52056Ajay lowkeyNo ratings yet
- MCP2210 USB To SPI Protocol Converter With GPIO (Host Mode) 20002288CDocument82 pagesMCP2210 USB To SPI Protocol Converter With GPIO (Host Mode) 20002288Cjay lowkeyNo ratings yet
- Analog Sensor Measurement and Acquisition DS00003521ADocument27 pagesAnalog Sensor Measurement and Acquisition DS00003521Ajay lowkeyNo ratings yet
- Final TestDocument10 pagesFinal TestbennyNo ratings yet
- Calibration of Force ReductionDocument36 pagesCalibration of Force Reductionvincenzo_12613735No ratings yet
- GLP BmsDocument18 pagesGLP BmsDr.Subhashish TripathyNo ratings yet
- Of The Month Is Live. 100+ Subjects. Participate Now!: Sanfoundry Certification ContestDocument4 pagesOf The Month Is Live. 100+ Subjects. Participate Now!: Sanfoundry Certification ContestBaydaa QaidyNo ratings yet
- CE Review GEOMETRY 2Document6 pagesCE Review GEOMETRY 2Paul Gerard AguilarNo ratings yet
- Sketchup-Rhino Cheat SheetDocument1 pageSketchup-Rhino Cheat Sheetxanext7No ratings yet
- Fentanyl - Wikipedia, The Free EncyclopediaDocument13 pagesFentanyl - Wikipedia, The Free EncyclopediaKeren SingamNo ratings yet
- Genie GS-1930 Parts ManualDocument194 pagesGenie GS-1930 Parts ManualNestor Matos GarcíaNo ratings yet
- VTA28-G5: Fuel OptimizedDocument3 pagesVTA28-G5: Fuel OptimizedIslam HemdanNo ratings yet
- L2 Biostatistics ProbabilityDocument84 pagesL2 Biostatistics ProbabilityAaron CiudadNo ratings yet
- DCS YokogawaDocument17 pagesDCS Yokogawasswahyudi100% (1)
- Rac Question PaperDocument84 pagesRac Question PaperibrahimNo ratings yet
- Army Aviation Digest - Nov 1978Document52 pagesArmy Aviation Digest - Nov 1978Aviation/Space History Library100% (1)
- Approved Project 25 StandardsDocument5 pagesApproved Project 25 StandardsepidavriosNo ratings yet
- Sch3u Exam Review Ws s2018 PDFDocument4 pagesSch3u Exam Review Ws s2018 PDFwdsfNo ratings yet
- Astm 2017-F2059Document5 pagesAstm 2017-F2059laythNo ratings yet
- Solid Modeling Techniques: Constructive Solid Geometry (CSG)Document22 pagesSolid Modeling Techniques: Constructive Solid Geometry (CSG)amolNo ratings yet
- Adaptive Cruise ControlDocument5 pagesAdaptive Cruise ControlIJIRSTNo ratings yet
- Chemistry Notes: SUBJECT: Leaving Cert Chemistry Level: TEACHER: Tara LyonsDocument5 pagesChemistry Notes: SUBJECT: Leaving Cert Chemistry Level: TEACHER: Tara LyonsSevinc NuriyevaNo ratings yet
- Hurricanes Grade5Document3 pagesHurricanes Grade5Anonymous m3yrUPNo ratings yet
- Abnormalities of Placenta, Amniotic Fluid and Cord: Prepared By, B. Ezhilarasi, Nursing TutorDocument21 pagesAbnormalities of Placenta, Amniotic Fluid and Cord: Prepared By, B. Ezhilarasi, Nursing TutorGopala KrishnanNo ratings yet
- Ventricular Septal DefectDocument9 pagesVentricular Septal DefectpepotchNo ratings yet
- Quarter 4 English As Grade 4Document28 pagesQuarter 4 English As Grade 4rubyneil cabuangNo ratings yet
- Updated SAP Cards Requirement JalchdDocument51 pagesUpdated SAP Cards Requirement Jalchdapi-3804296No ratings yet
- iPQ-Center Webvideo Star TTB MA R1 42 en PDFDocument32 pagesiPQ-Center Webvideo Star TTB MA R1 42 en PDFHamid KharazmiNo ratings yet
- Book BindingDocument14 pagesBook Bindingpesticu100% (2)
- The Wild T1 TheodoliteDocument61 pagesThe Wild T1 TheodoliteCJLara100% (1)
- Assignment 4 SolutionsDocument9 pagesAssignment 4 SolutionsNengke Lin100% (2)
- Paranoia XP - Gamemaster Screen Booklet - Mandatory Fun Enforcement PackDocument24 pagesParanoia XP - Gamemaster Screen Booklet - Mandatory Fun Enforcement PackStBash100% (3)
- Southwest Airlines Final ReportDocument16 pagesSouthwest Airlines Final Reportapi-427311067No ratings yet