You might also like
- Using HC900 Accutune IIIDocument3 pagesUsing HC900 Accutune IIIthanh_cdt01No ratings yet
- Ecm Gain SettingDocument2 pagesEcm Gain SettingMuomen FarooqNo ratings yet
- DisplayDocument2 pagesDisplaybilmon selviantoNo ratings yet
- Gain Parameter ConfigurationDocument4 pagesGain Parameter Configurationlinkangjun0621No ratings yet
- Cummins QSB6.7 and QSB4.5 General Features Explaination - ElectronicsDocument9 pagesCummins QSB6.7 and QSB4.5 General Features Explaination - ElectronicsAnders HedlöfNo ratings yet
- Governor (Types I, II, IV, and V) - CheckDocument5 pagesGovernor (Types I, II, IV, and V) - CheckDaniel TekleNo ratings yet
- ISO 9001 CERTIFIED SPEED CONTROL UNIT DOCUMENTDocument2 pagesISO 9001 CERTIFIED SPEED CONTROL UNIT DOCUMENTajcapetillog100% (2)
- Gauges and IndicatorsDocument3 pagesGauges and Indicatorsbenjir shuvoNo ratings yet
- Introduction of PowerCom Genset Controls for 320-625KVA NodesDocument8 pagesIntroduction of PowerCom Genset Controls for 320-625KVA NodesTaz UddinNo ratings yet
- Warning: ESD5500E Series Speed Control UnitDocument6 pagesWarning: ESD5500E Series Speed Control UnitLuis Alberto LopezNo ratings yet
- 6.teste e Ajustes G3500 PDFDocument102 pages6.teste e Ajustes G3500 PDFrony silvaNo ratings yet
- Permanent Magnet DC Motor Control - A Simple Pid (Proportional Integral Derivative)Document9 pagesPermanent Magnet DC Motor Control - A Simple Pid (Proportional Integral Derivative)Juan Martín ChimentoNo ratings yet
- Introduction to PID Temperature ControlDocument8 pagesIntroduction to PID Temperature ControlBộ Môn DieuKhienhoc100% (1)
- Componetes Electronicos Cat (056-109)Document54 pagesComponetes Electronicos Cat (056-109)Edgar MaldonadoNo ratings yet
- 745 Cat EtDocument6 pages745 Cat EtLucky advantureNo ratings yet
- Workshopman 03Document33 pagesWorkshopman 03Mohand Oubélaid Ait HammouNo ratings yet
- Start Stop System Automobiles: Submitted By: Garima Madan Eee 7 SEM ROLL NO. 0771504907Document52 pagesStart Stop System Automobiles: Submitted By: Garima Madan Eee 7 SEM ROLL NO. 0771504907Garima MadanNo ratings yet
- Advantage and Disadvantage of PIDDocument6 pagesAdvantage and Disadvantage of PIDNathaniel PascuaNo ratings yet
- Motec Gear Change Ignition CutDocument16 pagesMotec Gear Change Ignition CutOutlawRNo ratings yet
- Basic DC Motor Speed PID Control With The Infineon C167 FamilyDocument10 pagesBasic DC Motor Speed PID Control With The Infineon C167 FamilyCAFECHINONo ratings yet
- Edc System For Bs III - Bs IVDocument55 pagesEdc System For Bs III - Bs IVAparnesh Mukhopadhyay85% (170)
- OMM - Gauges and IndicatorsDocument3 pagesOMM - Gauges and Indicatorsjordan navarroNo ratings yet
- Senr6483-00 3412 PeecDocument59 pagesSenr6483-00 3412 PeecJeff Hill80% (5)
- FSK-628D Gobernador Electronico de MotorDocument35 pagesFSK-628D Gobernador Electronico de Motorsoldadores motoresNo ratings yet
- SMCS - 1266-025Document10 pagesSMCS - 1266-025hossen eskandaryNo ratings yet
- Gac Esd5500Document7 pagesGac Esd5500christramNo ratings yet
- PIIIDDocument12 pagesPIIIDLionel81No ratings yet
- Control Strategy, Selective Control SystemDocument10 pagesControl Strategy, Selective Control SystemHutama Putra WibawaNo ratings yet
- ESD5100 Series Speed Control UnitDocument2 pagesESD5100 Series Speed Control UnitJaimeCoelloNo ratings yet
- Initial Start Up Procedure g3516bDocument16 pagesInitial Start Up Procedure g3516bmuhammad arifNo ratings yet
- Electronic Governor CatalogDocument26 pagesElectronic Governor CatalogAung Mh100% (1)
- Engine Monitoring System (G3516B)Document9 pagesEngine Monitoring System (G3516B)victor.cipriani100% (2)
- Engine Room Simulator Automation & Control GuideDocument34 pagesEngine Room Simulator Automation & Control Guider0x0rNo ratings yet
- Version Changes in Ver 3.5B: Mercury2 4cyl Ver3.5B GP Output Priority LayoutDocument4 pagesVersion Changes in Ver 3.5B: Mercury2 4cyl Ver3.5B GP Output Priority LayoutFluke RanzaNo ratings yet
- YSD-FSK639D Governor-Usermanual enDocument19 pagesYSD-FSK639D Governor-Usermanual enMohamed A.AlbadriNo ratings yet
- Challenger7 Fly by Wire - V100Document21 pagesChallenger7 Fly by Wire - V100GustavoNo ratings yet
- Engine Design Guide 2015 DGDocument7 pagesEngine Design Guide 2015 DGAu GroupsNo ratings yet
- Generator Automatic Voltage Regulator Operation Manual: Tel: - Fax: - @Document8 pagesGenerator Automatic Voltage Regulator Operation Manual: Tel: - Fax: - @Syed Mohammad Naveed100% (1)
- INSITE 7 6 1 Product Announcement FinalDocument4 pagesINSITE 7 6 1 Product Announcement Finalkengo2xNo ratings yet
- Easy Auto Tuning GuideDocument8 pagesEasy Auto Tuning Guidepanderial100% (1)
- Ecu 750 Instruction ManualDocument8 pagesEcu 750 Instruction ManualAu GroupsNo ratings yet
- ECU List 7 0 0 New Features ListDocument37 pagesECU List 7 0 0 New Features ListLUATNo ratings yet
- Motion Controll system brief introductionDocument16 pagesMotion Controll system brief introductionRubenNo ratings yet
- CAT 3412 General InformationDocument7 pagesCAT 3412 General InformationCEVegaO100% (1)
- Cat Eng-Er Serv PDFDocument25 pagesCat Eng-Er Serv PDFGiapy Phuc TranNo ratings yet
- 3500 Governer Fuel Ratio ControlDocument32 pages3500 Governer Fuel Ratio ControlaliNo ratings yet
- Obd VNL VolvoDocument23 pagesObd VNL Volvosalvatore702100% (2)
- Powertrain Control SoftwareDocument6 pagesPowertrain Control SoftwareJosé AntonioNo ratings yet
- Traction Control User S GuideDocument5 pagesTraction Control User S GuidetcmracingNo ratings yet
- Calibration and Control of Servo TrainerDocument14 pagesCalibration and Control of Servo Trainersyedhamdan45No ratings yet
- 110 CFM Compressor - VFD SettingsDocument17 pages110 CFM Compressor - VFD Settingssantosh reddy dundigalNo ratings yet
- Outboard Warning System FeaturesDocument3 pagesOutboard Warning System FeaturesMartin A Gomez RNo ratings yet
- General Information - System Operation: Pantalla AnteriorDocument4 pagesGeneral Information - System Operation: Pantalla AnteriorGustavo PereiraNo ratings yet
- Activity Report: Diesel EngineDocument19 pagesActivity Report: Diesel EngineDim lordwin HacutinaNo ratings yet
- Operation and Maintenance Manual for 1104A-4G-34T Type GovernorDocument54 pagesOperation and Maintenance Manual for 1104A-4G-34T Type GovernorFaserphi Sac100% (2)
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- CDS57006 Bosch LSU 4.9 Sensor PDFDocument4 pagesCDS57006 Bosch LSU 4.9 Sensor PDFAnonymous K3FaYFlNo ratings yet
- Manual Bosch m744 Me744 EobdDocument66 pagesManual Bosch m744 Me744 EobdshayNo ratings yet
- User Manual: Subaru Diff ControllerDocument24 pagesUser Manual: Subaru Diff ControllershayNo ratings yet
- DAD0001 Drive by Wire Electronic Throttle SetupDocument17 pagesDAD0001 Drive by Wire Electronic Throttle SetupshayNo ratings yet
- Rear Spring Harsh Ride: T-SB-0359-10 December 21, 2010Document18 pagesRear Spring Harsh Ride: T-SB-0359-10 December 21, 2010goombaNo ratings yet
- The BMW M340i Petrol - SpecsheetDocument1 pageThe BMW M340i Petrol - SpecsheetChaitanyaJvNo ratings yet
- DelcoDocument2 pagesDelcoTalebNo ratings yet
- D20S-5 Sb1109e12 PDFDocument848 pagesD20S-5 Sb1109e12 PDFGORD100% (1)
- 00052705920-Electrical SystemDocument246 pages00052705920-Electrical Systemlorant hathaziNo ratings yet
- Audi TT 2000-2006 Repair Manual - ExcerptDocument6 pagesAudi TT 2000-2006 Repair Manual - ExcerptBentley Publishers50% (2)
- Mech STONE MASTIC ASPHALTDocument13 pagesMech STONE MASTIC ASPHALTsachin guptaNo ratings yet
- Electric Powered Forklift: 4.0-5.0 Ton 7FbmfDocument4 pagesElectric Powered Forklift: 4.0-5.0 Ton 7FbmfthowchinNo ratings yet
- Additional Applications: Blitz Co., LTDDocument4 pagesAdditional Applications: Blitz Co., LTDjimmyqf91No ratings yet
- E Series ADT B25 B30E Mk2 Tier 4f BENA Broch17740815US EnglishwebDocument13 pagesE Series ADT B25 B30E Mk2 Tier 4f BENA Broch17740815US EnglishwebPieter BothaNo ratings yet
- 17127-06 B11R D11C chn158345Document191 pages17127-06 B11R D11C chn158345Cooporacion Hidrodiesel SacNo ratings yet
- PB50 InstallationDocument7 pagesPB50 InstallationAbdulrahman Biomedical engineerNo ratings yet
- MTU 4000 12v 16v+Service+Manual PDFDocument2,706 pagesMTU 4000 12v 16v+Service+Manual PDFJorge Enrique Fuentes Marin87% (62)
- Bell B25D & B30D PartsDocument752 pagesBell B25D & B30D PartsJoaoVr82% (11)
- Adaptive Cruise Control SystemDocument5 pagesAdaptive Cruise Control SystemSathish KumarNo ratings yet
- TVS King 3W 4 Stroke CatalogueDocument6 pagesTVS King 3W 4 Stroke CatalogueMK AutoNo ratings yet
- Catalogo MFDocument411 pagesCatalogo MFCASE ETRANS100% (2)
- Disc brake technology: A concise historyDocument13 pagesDisc brake technology: A concise historyHemantha DalugamaNo ratings yet
- Maxon GP 22 BDocument1 pageMaxon GP 22 BElectromateNo ratings yet
- 2016 Audi A6 s6 65204Document294 pages2016 Audi A6 s6 65204Paynal SethNo ratings yet
- 6-Cylinder Injection Engine VW IndividualDocument217 pages6-Cylinder Injection Engine VW IndividualAgustinChaparroTiradoNo ratings yet
- Accident Report - BerosDocument2 pagesAccident Report - BerosRobert John TejeroNo ratings yet
- RD125C Crankcase Cylinder Exploded View DiagramDocument44 pagesRD125C Crankcase Cylinder Exploded View DiagramFede BonagliaNo ratings yet
- Caltrans Bridge Rails and BarriersDocument48 pagesCaltrans Bridge Rails and BarriersMarko ŠimićNo ratings yet
- VLVLR-2 - TableOfContentsDocument14 pagesVLVLR-2 - TableOfContentsLeila Ipar Gobus0% (1)
- 2018 12 19 TFL OOC Stations Potential London Overground Stations Old Oak Response To Issues RaisedDocument78 pages2018 12 19 TFL OOC Stations Potential London Overground Stations Old Oak Response To Issues RaisedscribdstorageNo ratings yet
- Tesla Model 3 Crash Test. ReportDocument8 pagesTesla Model 3 Crash Test. ReportFred LamertNo ratings yet
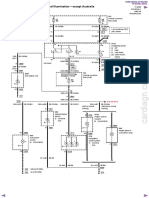
- Instrument Cluster and Panel Illumination - Except AustraliaDocument17 pagesInstrument Cluster and Panel Illumination - Except AustraliaGrigore ValentinNo ratings yet
- Jeep Grand Cherokee 2" Suspension Lift Kit Installation Instructions 1999-2003 Kit# Jwj22Document8 pagesJeep Grand Cherokee 2" Suspension Lift Kit Installation Instructions 1999-2003 Kit# Jwj22RASNo ratings yet
- دبي شروط ومواصفات الأرصفةDocument1 pageدبي شروط ومواصفات الأرصفةMahmoudRadi100% (2)