You might also like
- Manual de Procedimiento de Garantías Accesorios El CedroDocument9 pagesManual de Procedimiento de Garantías Accesorios El Cedroignacio medinaNo ratings yet
- Hoja de Instalacion y Montaje Tipo Mc3Document44 pagesHoja de Instalacion y Montaje Tipo Mc3BoxNo ratings yet
- Plus PotosiDocument59 pagesPlus Potosiedwin segoviaNo ratings yet
- Glosario de InvestigacionDocument3 pagesGlosario de InvestigacionMARIA CECILIA GARCIA RODRIGUEZNo ratings yet
- Hepatitis A FinalDocument34 pagesHepatitis A Finalbyrock66No ratings yet
- Trabajo de Informe de Estadistica DescriptivaDocument22 pagesTrabajo de Informe de Estadistica DescriptivaAlvaroLayaNo ratings yet
- Cuentos Trabalenguas y MasDocument10 pagesCuentos Trabalenguas y Masalondraluceroreyescoy78No ratings yet
- Riesgos LaboralesDocument10 pagesRiesgos LaboralesLeo EscobarNo ratings yet
- Taller Teoria Contable FORO DE DISCUSIÓN LOS PARADIGMAS DE TOMAS KUHNDocument5 pagesTaller Teoria Contable FORO DE DISCUSIÓN LOS PARADIGMAS DE TOMAS KUHNAndrés Camilo LozRuNo ratings yet
- Informe 8 Quimica AnaliticaDocument18 pagesInforme 8 Quimica AnaliticaZHULEM NICKOL AYALA TINEO100% (1)
- 1 Simbolos MatematicosDocument1 page1 Simbolos MatematicosF.No ratings yet
- 1) ¿Cuáles Eran Los Dos Principios Centrales de La AstronomíaDocument3 pages1) ¿Cuáles Eran Los Dos Principios Centrales de La AstronomíaJunior Ezequiel VillaverdeNo ratings yet
- Análisis Por Métodos Espectroscópicos y Estudio Del Proceso de Envejecimiento de Aceites Esenciales de Cítricos PDFDocument321 pagesAnálisis Por Métodos Espectroscópicos y Estudio Del Proceso de Envejecimiento de Aceites Esenciales de Cítricos PDFMario MatuteNo ratings yet
- Reflexiones Sobre La Identidad Narrativa Del MaestroDocument27 pagesReflexiones Sobre La Identidad Narrativa Del MaestroMirian perezNo ratings yet
- Desarrollo de Un Proyecto de Instalación EléctricaDocument62 pagesDesarrollo de Un Proyecto de Instalación EléctricaJosé CorreaNo ratings yet
- Problema 2Document2 pagesProblema 2guillermoNo ratings yet
- El Placer de MatarDocument13 pagesEl Placer de MatarPibe Daniel50% (4)
- Manual de Agua ClarificadaDocument18 pagesManual de Agua ClarificadaGerardoNo ratings yet
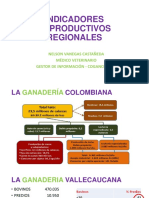
- Indicadores Reproductivos RegionalesDocument14 pagesIndicadores Reproductivos Regionalesjose ortizNo ratings yet
- El Papá de Pipi CalzaslargasDocument7 pagesEl Papá de Pipi Calzaslargaselles_guerrero8468No ratings yet
- Decreto Supremo #025-2021-MTCDocument10 pagesDecreto Supremo #025-2021-MTCDiario Oficial El PeruanoNo ratings yet
- Contrato de ArrendamientoDocument7 pagesContrato de Arrendamientotecnologicodelnorte plazaoasis100% (2)
- Aplicación de Las Ecuaciones de Maney para Calcular Los Momentos en Los Extremos de Las BarrasDocument4 pagesAplicación de Las Ecuaciones de Maney para Calcular Los Momentos en Los Extremos de Las BarrasAldo Salazar CamposNo ratings yet
- Escolástica y Patrística.... Hipolito de AntioquiaDocument21 pagesEscolástica y Patrística.... Hipolito de Antioquiaapn96100% (6)
- Corazon Valiente PDFDocument3 pagesCorazon Valiente PDFmasternet3000100% (1)
- Clasificacion de Ciencias y Enfoques (Final)Document4 pagesClasificacion de Ciencias y Enfoques (Final)Eduardo HNo ratings yet
- Las Enseñanzas de Carlos CastanedaDocument325 pagesLas Enseñanzas de Carlos Castanedajmperezluis100% (7)
- (Lab7) Circuitos Trifasicos BydDocument37 pages(Lab7) Circuitos Trifasicos BydGarcia EduNo ratings yet
- IM Practica 10Document5 pagesIM Practica 10MIguel Angel S. BNo ratings yet
- Documento de Transporte 1300000009 XLK332 PDFDocument1 pageDocumento de Transporte 1300000009 XLK332 PDFJudisita Ce ANo ratings yet