You might also like
- Informations Some Interfaces of Proc Filesystem. Is There Any Other Ways To Get Process Memory Informations Apart From Proc Interfaces?Document10 pagesInformations Some Interfaces of Proc Filesystem. Is There Any Other Ways To Get Process Memory Informations Apart From Proc Interfaces?kumar0% (1)
- Prime B550-Plus r1.0Document128 pagesPrime B550-Plus r1.0Julio AbdalaNo ratings yet
- A Comprehensive Presentation On 'An Analysis of Linux Scalability To Many Cores'Document49 pagesA Comprehensive Presentation On 'An Analysis of Linux Scalability To Many Cores'RomeoTangoNo ratings yet
- VX Works and Interrupt Service RoutinesDocument22 pagesVX Works and Interrupt Service RoutinesTanvi Sharma100% (1)
- Copia Di Freertos - v1.7 - Cmsis Os APIDocument260 pagesCopia Di Freertos - v1.7 - Cmsis Os APIantlebNo ratings yet
- Lab Manual - RTOS AchitectureDocument6 pagesLab Manual - RTOS Achitectureritika jaiswalNo ratings yet
- Vxworks Real Time OsDocument6 pagesVxworks Real Time OsKomal AwasthiNo ratings yet
- RTOS uCOS IIDocument66 pagesRTOS uCOS IIAkshay BhosaleNo ratings yet
- Unit Iv Rtos Based Embedded System DesignDocument11 pagesUnit Iv Rtos Based Embedded System DesignKartheeswari Saravanan100% (1)
- File Management & IO Services in RTOSDocument18 pagesFile Management & IO Services in RTOSjayanthimurthyNo ratings yet
- Memory ManagementDocument24 pagesMemory Managementanju kNo ratings yet
- Chapter 5Document11 pagesChapter 5Rekha PawarNo ratings yet
- Introduction To Distributed Programming System V IPC: Message Queues, Shared Memory, SemaphoresDocument29 pagesIntroduction To Distributed Programming System V IPC: Message Queues, Shared Memory, Semaphoresebbys89No ratings yet
- PosixDocument20 pagesPosixadeel akramNo ratings yet
- Linux Programming AssignmentDocument8 pagesLinux Programming AssignmentTatangwa BillyNo ratings yet
- Real-Time Operating System (RTOS) Based Embedded System DesignDocument39 pagesReal-Time Operating System (RTOS) Based Embedded System DesignShamitha HiremathNo ratings yet
- Ch-4 - Threads and ConcurencyDocument35 pagesCh-4 - Threads and ConcurencysankarkvdcNo ratings yet
- VX WorksDocument42 pagesVX Worksrakeshkalathil100% (1)
- OS Unit - IIDocument74 pagesOS Unit - IIDee ShanNo ratings yet
- Unit 4aDocument104 pagesUnit 4aKoushik ThummalaNo ratings yet
- Es Rtos Exp 5 - SKDocument15 pagesEs Rtos Exp 5 - SKAkshara VNo ratings yet
- Unit 4Document28 pagesUnit 4Urvashi SapraNo ratings yet
- Background Swapping Contiguous Allocation Paging Segmentation Segmentation With PagingDocument54 pagesBackground Swapping Contiguous Allocation Paging Segmentation Segmentation With PagingFarooq ShadNo ratings yet
- Os PPTDocument30 pagesOs PPTNidhi MadnaniNo ratings yet
- Simulation of Multi Threading On Single Threaded Operating SystemsDocument8 pagesSimulation of Multi Threading On Single Threaded Operating SystemsGuy VithalNo ratings yet
- 3.2 Rtlinux Inter-Process Communication (Ipc)Document8 pages3.2 Rtlinux Inter-Process Communication (Ipc)ravirajsjoshiNo ratings yet
- Process: An Instance of a Program in ExecutionDocument37 pagesProcess: An Instance of a Program in ExecutionIn SaneNo ratings yet
- Device DriversDocument46 pagesDevice DriversAsad ButtNo ratings yet
- Unit 2Document23 pagesUnit 2PRADEEP KOPPARTHINo ratings yet
- Embedded Systems Ch-4Document35 pagesEmbedded Systems Ch-4NatyBNo ratings yet
- Device Drivers ExplainedDocument20 pagesDevice Drivers ExplainedsubramanyamNo ratings yet
- Chapter 4Document15 pagesChapter 4MehreenAkramNo ratings yet
- RTOS: Real-Time Operating Systems ExplainedDocument11 pagesRTOS: Real-Time Operating Systems Explainedpavi1402No ratings yet
- Distributed Object Based Systems Case StudyDocument15 pagesDistributed Object Based Systems Case StudyArun ChinnathambiNo ratings yet
- Module 5 RTOSDocument23 pagesModule 5 RTOSaleenamariya2314No ratings yet
- Embedded SystemsDocument27 pagesEmbedded Systemsvenkat7186No ratings yet
- OSDocument19 pagesOScorote1026No ratings yet
- Vxworks Rtos: Embedded Systems-AssignmentDocument6 pagesVxworks Rtos: Embedded Systems-AssignmentPrashanth KumarNo ratings yet
- Multi-threading benefits and typesDocument8 pagesMulti-threading benefits and typestrupti.kodinariya9810No ratings yet
- POSIX Threads ProgrammingDocument15 pagesPOSIX Threads ProgrammingMaria Luisa Nuñez MendozaNo ratings yet
- Rtos PDFDocument12 pagesRtos PDFPrathameshNo ratings yet
- R RRRRRRRR FinalDocument28 pagesR RRRRRRRR FinalRachell BenemeritoNo ratings yet
- Survey of RtosDocument17 pagesSurvey of Rtoskvamsee112100% (1)
- Chapter 6Document74 pagesChapter 6Jojo CansinoNo ratings yet
- Ipc in SolarisDocument24 pagesIpc in SolarisVidhya ShankarNo ratings yet
- History Design Principles Programmer Interface User Interface Process Management Memory Management File System I/O System Interprocess CommunicationDocument62 pagesHistory Design Principles Programmer Interface User Interface Process Management Memory Management File System I/O System Interprocess CommunicationFarooq ShadNo ratings yet
- ELT048 - Embedded Operational Systems: Rodrigo Maximiano Antunes de Almeida @rmaalmeida Universidade Federal de ItajubáDocument150 pagesELT048 - Embedded Operational Systems: Rodrigo Maximiano Antunes de Almeida @rmaalmeida Universidade Federal de Itajubánelson_herreraNo ratings yet
- A1 OS ReviewDocument53 pagesA1 OS ReviewThyaga RajNo ratings yet
- A Comparison of Buffer Overflow Prevention Implementations and Their WeaknessesDocument54 pagesA Comparison of Buffer Overflow Prevention Implementations and Their WeaknessesMartín BiamonteNo ratings yet
- AOS - Theory - Multi-Processor & Distributed UNIX Operating Systems - IDocument13 pagesAOS - Theory - Multi-Processor & Distributed UNIX Operating Systems - ISujith Ur FrndNo ratings yet
- Case Study - Mac OS-2 - PDocument36 pagesCase Study - Mac OS-2 - PPranjal Kumawat0% (1)
- 3 Processes: 3.1 ThreadsDocument11 pages3 Processes: 3.1 ThreadsFyruz FyFiveNo ratings yet
- OS Lec-2Document69 pagesOS Lec-2tehreemgroup123No ratings yet
- Basic Operating System Concepts: A ReviewDocument68 pagesBasic Operating System Concepts: A ReviewMayuresh KulkarniNo ratings yet
- Operating Systems Exam: Roles, System Calls, Context SwitchingDocument16 pagesOperating Systems Exam: Roles, System Calls, Context SwitchingGenc GashiNo ratings yet
- Advanced C: - UdayDocument117 pagesAdvanced C: - UdayRaghavendra Rajendra Basvan100% (1)
- Advanced Embedded System Design: Project ReportDocument7 pagesAdvanced Embedded System Design: Project ReportSyed Akhlaq100% (1)
- Operating Systems Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesFrom EverandOperating Systems Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesNo ratings yet
- Lenovo Uefi - Setting - GuideDocument66 pagesLenovo Uefi - Setting - Guide6w52dw6p5dNo ratings yet
- Heathkit Catalog 867R Dec 84Document29 pagesHeathkit Catalog 867R Dec 84lxz51010% (1)
- t400 and t500 DatasheetDocument4 pagest400 and t500 Datasheetfirefoxextslurper100% (2)
- ZynqHW 2016 2 Lab 2 v09Document45 pagesZynqHW 2016 2 Lab 2 v09abdelli ali100% (1)
- Ec8501 Digital Communication 1Document13 pagesEc8501 Digital Communication 1Naaz shahNo ratings yet
- How To Root Lenovo Vibe K5 or K5 PlusDocument4 pagesHow To Root Lenovo Vibe K5 or K5 Pluslukas100% (1)
- ISA Bus Pins SVGDocument3 pagesISA Bus Pins SVGEmin KültürelNo ratings yet
- Lecture 01 Introduction To ProgrammingDocument41 pagesLecture 01 Introduction To ProgrammingRehan Nazam MinhasNo ratings yet
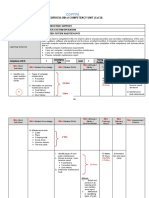
- Coptpa: Curriculum of Competency Unit (Cocu)Document16 pagesCoptpa: Curriculum of Competency Unit (Cocu)MUHAMMAD AKMAL ALIAS ALIASNo ratings yet
- Perangkat Penunjang Pembuatan Studio MetaverseDocument2 pagesPerangkat Penunjang Pembuatan Studio MetaverseMaulana JamaludinNo ratings yet
- SHANTILAL SHAH ENGINEERING COLLEGE MICROCONTROLLER & INTERFACING NOTESDocument13 pagesSHANTILAL SHAH ENGINEERING COLLEGE MICROCONTROLLER & INTERFACING NOTESSandeep KumarNo ratings yet
- MSP430™ FRAMTechnology - HowTo and BestPracticesDocument21 pagesMSP430™ FRAMTechnology - HowTo and BestPractices呂柏勳No ratings yet
- Laptop Models 2021 - 22 (No Affiliates) .XLSX - Sheet1Document1 pageLaptop Models 2021 - 22 (No Affiliates) .XLSX - Sheet1dhg tNo ratings yet
- 3 Hours / 70 Marks: Seat NoDocument2 pages3 Hours / 70 Marks: Seat NoayushNo ratings yet
- Canon Ir2016 Ir2020 BrochureDocument4 pagesCanon Ir2016 Ir2020 BrochureSean Cassidy ChandaNo ratings yet
- 3 Selecting A Programming LanguageDocument3 pages3 Selecting A Programming Languageyarichek.zviagintsevNo ratings yet
- Your Atari Computer, A Guide To Atari 400/800 Personal ComputersDocument466 pagesYour Atari Computer, A Guide To Atari 400/800 Personal Computersremow100% (3)
- Question Bank: ७०८ सदाशिव पेठ, कुमठेकर मार्ग, पुणे ४११०३० संपकग क्रमांक (020) 2447 6938 E-mailDocument24 pagesQuestion Bank: ७०८ सदाशिव पेठ, कुमठेकर मार्ग, पुणे ४११०३० संपकग क्रमांक (020) 2447 6938 E-mailYadnesh PujareNo ratings yet
- UT850Document1 pageUT850Mark Izsm AmersonNo ratings yet
- Seminarski CPUDocument10 pagesSeminarski CPUnfix007No ratings yet
- Genesys BSB Standard and Custom IP Addition: Using EDK 11 SP 4Document74 pagesGenesys BSB Standard and Custom IP Addition: Using EDK 11 SP 4GOWTHAMI PNo ratings yet
- Categories Of Computers: PCs, Laptops, Servers & MoreDocument7 pagesCategories Of Computers: PCs, Laptops, Servers & MorePuteri AshikinNo ratings yet
- Tabela Clone Jan 2012Document5 pagesTabela Clone Jan 2012Sthefany BritoNo ratings yet
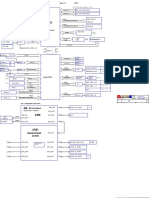
- Msi ms-7592 Rev 1.1 SCH PDFDocument33 pagesMsi ms-7592 Rev 1.1 SCH PDFmohammed abdoNo ratings yet
- Aspire E1 521Document234 pagesAspire E1 521danielradu27No ratings yet
- User ManualDocument13 pagesUser Manualgrlr0072467No ratings yet
- Student data management softwareDocument31 pagesStudent data management softwareMohak Lakra100% (1)
- Introduction To The World of ComputersDocument4 pagesIntroduction To The World of ComputersAllaine Grace CanoNo ratings yet
- A+ Guide To Managing and Maintaining Your PC: Introducing HardwareDocument49 pagesA+ Guide To Managing and Maintaining Your PC: Introducing HardwaresafNo ratings yet