You might also like
- Machine Learning ModelsDocument16 pagesMachine Learning ModelsShivam ChadhaNo ratings yet
- Deep Learning AnswersDocument36 pagesDeep Learning AnswersmrunalNo ratings yet
- A Pattern Is An Abstract Object, Such As A Set of Measurements Describing A Physical ObjectDocument12 pagesA Pattern Is An Abstract Object, Such As A Set of Measurements Describing A Physical Objectriddickdanish1No ratings yet
- COMP4702 Notes 2019: Week 2 - Supervised LearningDocument23 pagesCOMP4702 Notes 2019: Week 2 - Supervised LearningKelbie DavidsonNo ratings yet
- Bayesian Analysis of Extreme Operational Losses: Chyng-Lan LiangDocument17 pagesBayesian Analysis of Extreme Operational Losses: Chyng-Lan LiangOnkar BagariaNo ratings yet
- CS 601 Machine Learning Unit 5Document18 pagesCS 601 Machine Learning Unit 5Priyanka BhateleNo ratings yet
- ML PPT 2Document44 pagesML PPT 2ergrehgeNo ratings yet
- Lect9 and 10 Machine Learning ModelsDocument14 pagesLect9 and 10 Machine Learning Modelsdylansamy41No ratings yet
- Lecture 2: Basics and Definitions: Networks As Data ModelsDocument28 pagesLecture 2: Basics and Definitions: Networks As Data ModelsshardapatelNo ratings yet
- Semi-Supervised Learning With Deep GenerativeDocument9 pagesSemi-Supervised Learning With Deep GenerativecubewormNo ratings yet
- ML NotesDocument12 pagesML NotesMargaret SavithaNo ratings yet
- Steps of Implementation of A GLMDocument8 pagesSteps of Implementation of A GLMPaul WattellierNo ratings yet
- Statistical Machine Learning-The Basic Approach and Current Research ChallengesDocument35 pagesStatistical Machine Learning-The Basic Approach and Current Research Challengesnikhilesh kumarNo ratings yet
- Mathematical ModelingDocument33 pagesMathematical ModelingIsma OllshopNo ratings yet
- Bayesian Nonparametrics and The Probabilistic Approach To ModellingDocument27 pagesBayesian Nonparametrics and The Probabilistic Approach To ModellingTalha YousufNo ratings yet
- Machine Learning1Document8 pagesMachine Learning1Fecky Fihayatul IchsanNo ratings yet
- 01 - IntroductionDocument35 pages01 - IntroductionJoão SilvaNo ratings yet
- A Gentle Tutorial in Bayesian Statistics PDFDocument45 pagesA Gentle Tutorial in Bayesian Statistics PDFmbuyiselwa100% (4)
- ML Unit 2Document21 pagesML Unit 22306603No ratings yet
- Pattern Recognition - QuestionsDocument12 pagesPattern Recognition - QuestionsAnkur KumarNo ratings yet
- Model Evaluation and SelectionDocument6 pagesModel Evaluation and SelectionKishore DevineniNo ratings yet
- Extreme Learning Machine For Missing Data Using Multiple ImputationsDocument18 pagesExtreme Learning Machine For Missing Data Using Multiple ImputationsluizfelipetuxNo ratings yet
- Unit 7 - 2Document59 pagesUnit 7 - 2Yuvraj RanaNo ratings yet
- Linear RegressionDocument31 pagesLinear RegressionPravin PanduNo ratings yet
- Advanced Data Analytics: Simon ScheideggerDocument146 pagesAdvanced Data Analytics: Simon ScheideggerRuben KempterNo ratings yet
- Machine LearningDocument6 pagesMachine LearningSushmita MhamaneNo ratings yet
- Bouchard, Stenetorp, Riedel - Unknown - Learning To Generate Textual DataDocument9 pagesBouchard, Stenetorp, Riedel - Unknown - Learning To Generate Textual DataBlack FoxNo ratings yet
- MDLTM Manual 041217 Public PDFDocument66 pagesMDLTM Manual 041217 Public PDFeeNo ratings yet
- Machine LearningDocument40 pagesMachine LearningfNo ratings yet
- Texto para Discussão: Departamento de EconomiaDocument43 pagesTexto para Discussão: Departamento de EconomiaAna ScaletNo ratings yet
- STAT 503: Statistical Methods in Biology: Likelihood Profile IntervalsDocument41 pagesSTAT 503: Statistical Methods in Biology: Likelihood Profile IntervalsAidan CheeseNo ratings yet
- Conditional Likelihood Maximisation: A Unifying Framework For Information Theoretic Feature SelectionDocument40 pagesConditional Likelihood Maximisation: A Unifying Framework For Information Theoretic Feature SelectionSudhit SethiNo ratings yet
- Statistical ModelDocument6 pagesStatistical Modelhasan jamiNo ratings yet
- Bark08 Ghahramani Samlbb 01Document26 pagesBark08 Ghahramani Samlbb 01Shifath NafisNo ratings yet
- CSE176 Introduction To Machine LearningDocument3 pagesCSE176 Introduction To Machine LearningravigobiNo ratings yet
- Combining Models in Longitudinal Data Analysis: Noname Manuscript No. (Will Be Inserted by The Editor)Document32 pagesCombining Models in Longitudinal Data Analysis: Noname Manuscript No. (Will Be Inserted by The Editor)apocalipsis1999No ratings yet
- Empirical Bayes For Learning To LearnDocument8 pagesEmpirical Bayes For Learning To Learnmariana henteaNo ratings yet
- The General Considerations and Implementation In: K-Means Clustering Technique: MathematicaDocument10 pagesThe General Considerations and Implementation In: K-Means Clustering Technique: MathematicaMario ZamoraNo ratings yet
- 105 Machine Learning PaperDocument6 pages105 Machine Learning PaperAabda AhmedNo ratings yet
- Information Geometry in Optimization Machine LearnDocument3 pagesInformation Geometry in Optimization Machine LearnsggtioNo ratings yet
- Minimum Description LengthDocument6 pagesMinimum Description Lengthnigel989No ratings yet
- Week6 HandoutDocument44 pagesWeek6 HandoutSamNo ratings yet
- Fuzzy Decision TreesDocument12 pagesFuzzy Decision TreesVu Trung NguyenNo ratings yet
- Web Description MATLABDocument32 pagesWeb Description MATLABnadunnnNo ratings yet
- Discriminative Generative: R Follow ADocument18 pagesDiscriminative Generative: R Follow AChrsan Ram100% (1)
- Summer of Science-Final ReportDocument7 pagesSummer of Science-Final ReportManan SharmaNo ratings yet
- Statistical ModelDocument5 pagesStatistical ModelBOBBY212No ratings yet
- Machine Learning Classifiers and FMRI (2009)Document11 pagesMachine Learning Classifiers and FMRI (2009)Donald AndersonNo ratings yet
- Mixture ModelsDocument16 pagesMixture Modelssankarshan7No ratings yet
- ML AlgorithmsDocument12 pagesML AlgorithmsShivendra ChandNo ratings yet
- Machine LearningDocument80 pagesMachine LearningGabriel ChakhvashviliNo ratings yet
- Intro To Data Science SummaryDocument17 pagesIntro To Data Science SummaryHussein ElGhoulNo ratings yet
- ML-Plan: Automated Machine Learning Via Hierarchical PlanningDocument21 pagesML-Plan: Automated Machine Learning Via Hierarchical PlanningarmaanNo ratings yet
- Mathematical model@ABHISHEK: Examples of Mathematical ModelsDocument8 pagesMathematical model@ABHISHEK: Examples of Mathematical ModelsakurilNo ratings yet
- Machine Learning INTRODocument12 pagesMachine Learning INTROkasemfatima2004No ratings yet
- Discriminative Vs Generative AlgorithmsDocument3 pagesDiscriminative Vs Generative AlgorithmsACCELIA S 21CSMENo ratings yet
- Bayesian Learning RulesDocument37 pagesBayesian Learning RulesBrookeNo ratings yet
- Process Performance Models: Statistical, Probabilistic & SimulationFrom EverandProcess Performance Models: Statistical, Probabilistic & SimulationNo ratings yet
- Group Method of Data Handling: Fundamentals and Applications for Predictive Modeling and Data AnalysisFrom EverandGroup Method of Data Handling: Fundamentals and Applications for Predictive Modeling and Data AnalysisNo ratings yet
- Ass 6 609Document4 pagesAss 6 609Nakul singhNo ratings yet
- Ass4 609Document2 pagesAss4 609Nakul singhNo ratings yet
- Ass 8 609Document2 pagesAss 8 609Nakul singhNo ratings yet
- Ass 7 609Document4 pagesAss 7 609Nakul singhNo ratings yet
- Ass3 609Document2 pagesAss3 609Nakul singhNo ratings yet
- Ass2 609Document2 pagesAss2 609Nakul singhNo ratings yet
- Ass 1 609Document2 pagesAss 1 609Nakul singhNo ratings yet
- Assignment 2 - EE301 - 2022Document1 pageAssignment 2 - EE301 - 2022Nakul singhNo ratings yet
- Assignment 3 - EE301 - 2022Document1 pageAssignment 3 - EE301 - 2022Nakul singhNo ratings yet
- ComputerAssign FilterDesignDocument1 pageComputerAssign FilterDesignNakul singhNo ratings yet
- AssignmentsDocument2 pagesAssignmentsNakul singhNo ratings yet
- Assignment 4 - EE301 - 2022Document2 pagesAssignment 4 - EE301 - 2022Nakul singhNo ratings yet
- Single Crossbar Array of Memristors With Bipolar IDocument7 pagesSingle Crossbar Array of Memristors With Bipolar INakul singhNo ratings yet
- Training For NeuromorphicDocument21 pagesTraining For NeuromorphicAnonymous oQEx3zNo ratings yet
- Ising Formulation of NP ProblemsDocument15 pagesIsing Formulation of NP ProblemsNakul singhNo ratings yet
- With Graded Response Properties Those: Neurons Have Collective Like of Two-State NeuronsDocument5 pagesWith Graded Response Properties Those: Neurons Have Collective Like of Two-State NeuronsNakul singhNo ratings yet
- 2008 02217 PDFDocument86 pages2008 02217 PDFNakul singhNo ratings yet
- Supplementary Information For: Mahmoodi Et AlDocument14 pagesSupplementary Information For: Mahmoodi Et AlNakul singhNo ratings yet
- Application of HNN For Max Cut ProblemDocument6 pagesApplication of HNN For Max Cut ProblemNakul singhNo ratings yet
- MSO-203B Assignment-02 October 14, 2019.: XX Xy Yy 2 XX Xy 2 Yy X yDocument1 pageMSO-203B Assignment-02 October 14, 2019.: XX Xy Yy 2 XX Xy 2 Yy X yNakul singhNo ratings yet
- Assignment 4 Mth102Document1 pageAssignment 4 Mth102Nakul singhNo ratings yet
- Address Lines A0-A7 and Data Lines D0-D7 Are Multiplexed in 8088.Document35 pagesAddress Lines A0-A7 and Data Lines D0-D7 Are Multiplexed in 8088.Mike ThomsonNo ratings yet
- Update Penjualan 2019 1Document941 pagesUpdate Penjualan 2019 1Viar TimikaNo ratings yet
- Oracle Audit Vault and Database FirewallDocument16 pagesOracle Audit Vault and Database FirewallRofiq AhmedNo ratings yet
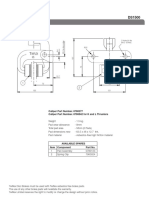
- DRC-4720 Bridge SensorDocument3 pagesDRC-4720 Bridge SensortedysuNo ratings yet
- BargeboardsDocument1 pageBargeboardsDavid O'MearaNo ratings yet
- User's Manual: A200 SeriesDocument194 pagesUser's Manual: A200 SeriesedgarNo ratings yet
- JHGCHBJKLDocument51 pagesJHGCHBJKLSwathi SriNo ratings yet
- New Gen Trunnion Soft Seat Ball ValveDocument7 pagesNew Gen Trunnion Soft Seat Ball ValvedirtylsuNo ratings yet
- Weld-On Brackets Type 35Document1 pageWeld-On Brackets Type 35Achraf BoudayaNo ratings yet
- PDF N Fcom Sek TF N Eu 20190311 DSC PLP LeduDocument600 pagesPDF N Fcom Sek TF N Eu 20190311 DSC PLP Leduhussein mohklisNo ratings yet
- Business Statistics Communicating With Numbers 4E 4Th Edition Sanjiv Jaggia Full ChapterDocument67 pagesBusiness Statistics Communicating With Numbers 4E 4Th Edition Sanjiv Jaggia Full Chapterdoris.heck867100% (3)
- Psychology of Color2Document33 pagesPsychology of Color2abdikani abdilaahiNo ratings yet
- An Inflection Point For The Data-Driven Enterprise: Pulse SurveyDocument20 pagesAn Inflection Point For The Data-Driven Enterprise: Pulse SurveyAndy BaneNo ratings yet
- MS Disc Brake CaliperDocument2 pagesMS Disc Brake Caliperghgh140No ratings yet
- DRV 33Document38 pagesDRV 33Alpha ConsultantsNo ratings yet
- Factors Affecting System Complexity: CouplingDocument4 pagesFactors Affecting System Complexity: CouplingJaskirat KaurNo ratings yet
- Developing A Social Media Strategy: © RB Consulting 2010Document12 pagesDeveloping A Social Media Strategy: © RB Consulting 2010edetpickin1No ratings yet
- Juhi S. Khandekar: Email ID: Contact (M) : +91-7710007972Document1 pageJuhi S. Khandekar: Email ID: Contact (M) : +91-7710007972Reddi SyamsundarNo ratings yet
- No. 304 (171) 2021/PA Admn 111!: To, Centre ExcellenceDocument9 pagesNo. 304 (171) 2021/PA Admn 111!: To, Centre ExcellenceSanjeev kumarNo ratings yet
- TPS65150 Low Input Voltage, Compact LCD Bias IC With VCOM BufferDocument48 pagesTPS65150 Low Input Voltage, Compact LCD Bias IC With VCOM BufferNurudeen KaikaiNo ratings yet
- RouterOS by Example Stephen Discher PDFDocument236 pagesRouterOS by Example Stephen Discher PDFAntonioNo ratings yet
- Board of Intermediate & Secondary Education, SargodhaDocument1 pageBoard of Intermediate & Secondary Education, SargodhaEic SNo ratings yet
- AN1009: Driving MOSFET and IGBT Switches Using The Si828x: Key FeaturesDocument22 pagesAN1009: Driving MOSFET and IGBT Switches Using The Si828x: Key FeaturesNikolas AugustoNo ratings yet
- Activity 6Document29 pagesActivity 6Kenneth Puguon0% (1)
- Discrete Mathematics - Propositional LogicDocument8 pagesDiscrete Mathematics - Propositional LogicAldrich PanioNo ratings yet
- 2005 Ikea CatalogDocument28 pages2005 Ikea Catalograhmani bagherNo ratings yet
- Top 20 Customer Service Manager Interview Questions & Answers 2022Document21 pagesTop 20 Customer Service Manager Interview Questions & Answers 2022IsyhomerNo ratings yet
- SHS SEPNAS Paper-Formatting-guidelines Pr2 Quantitative ReserachDocument24 pagesSHS SEPNAS Paper-Formatting-guidelines Pr2 Quantitative ReserachAnalyn RosarioNo ratings yet
- HDM Method PDFDocument117 pagesHDM Method PDFBonagiri DheerajNo ratings yet
- Logistics ManagementDocument2 pagesLogistics ManagementJohn Paul BarotNo ratings yet