You might also like
- Neuroevolution: Fundamentals and Applications for Surpassing Human Intelligence with NeuroevolutionFrom EverandNeuroevolution: Fundamentals and Applications for Surpassing Human Intelligence with NeuroevolutionNo ratings yet
- Neural Computations Underlying Arbitration Between Model-Based and Model-Free LearningDocument13 pagesNeural Computations Underlying Arbitration Between Model-Based and Model-Free LearningAntonio DíazNo ratings yet
- Behavioural Robustness: A Link Between Distributed Mechanisms and Coupled Transient DynamicsDocument13 pagesBehavioural Robustness: A Link Between Distributed Mechanisms and Coupled Transient Dynamicsjosef_151No ratings yet
- Tree-Structured Recurrent Switching Linear Dynamical Systems For Multi-Scale ModelingDocument17 pagesTree-Structured Recurrent Switching Linear Dynamical Systems For Multi-Scale ModelingOwenliey LiuNo ratings yet
- Computational Principles of Movement NeuroscienceDocument6 pagesComputational Principles of Movement NeuroscienceNicolas Espinoza ConstanzoNo ratings yet
- 151 A S1053811911002643 Main PDFDocument20 pages151 A S1053811911002643 Main PDFJesus LazaroNo ratings yet
- Effective Connectivity Influence Causality and Biophysical ModelingDocument23 pagesEffective Connectivity Influence Causality and Biophysical ModelingSreeniva JaboodiNo ratings yet
- Selecting Sensors in Biological Fractional-Order SystemsDocument13 pagesSelecting Sensors in Biological Fractional-Order SystemsYuankun XueNo ratings yet
- Wolpert 2013Document7 pagesWolpert 2013Dusan BarichNo ratings yet
- Exploring Individual Differences in Task Switching: Persistence and Other Personality Traits Related To Anterior Cingulate Cortex FunctionDocument24 pagesExploring Individual Differences in Task Switching: Persistence and Other Personality Traits Related To Anterior Cingulate Cortex FunctionDanielaNo ratings yet
- Eabe0340 FullDocument17 pagesEabe0340 FullAlejandro O. Cárdenas GarcíaNo ratings yet
- Encyclopedia of Computational Neuroscience Decision Making Models PDFDocument20 pagesEncyclopedia of Computational Neuroscience Decision Making Models PDFNikhil PrasannaNo ratings yet
- Ruan 2010Document17 pagesRuan 2010K59 Tran To Yen NhiNo ratings yet
- Nonlinear quantum neurodynamics with phase transitionsDocument29 pagesNonlinear quantum neurodynamics with phase transitionsnemismdNo ratings yet
- Real-Time Decision Fusion For Multimodal Neural Prosthetic DevicesDocument9 pagesReal-Time Decision Fusion For Multimodal Neural Prosthetic Deviceshyperion1No ratings yet
- Optimal Joint Detection and Estimation in Linear Models: Jianshu Chen, Yue Zhao, Andrea Goldsmith, and H. Vincent PoorDocument6 pagesOptimal Joint Detection and Estimation in Linear Models: Jianshu Chen, Yue Zhao, Andrea Goldsmith, and H. Vincent PoordoudikidNo ratings yet
- A Visualization Framework For The Analysis of Neuromuscular SimulationsDocument11 pagesA Visualization Framework For The Analysis of Neuromuscular Simulationsyacipo evyushNo ratings yet
- (2018) Friston Et Al. - Deep Temporal Models and Active InferenceDocument16 pages(2018) Friston Et Al. - Deep Temporal Models and Active InferenceRobert Chis-CiureNo ratings yet
- Koorehdavoudi Et Al-2016-Scientific ReportsDocument13 pagesKoorehdavoudi Et Al-2016-Scientific ReportsKevin IglesiasNo ratings yet
- Findling&Wyart - 2021 - Computation Noise in Human Learning Anddecision-Making Origin, Impact, FunctionDocument9 pagesFindling&Wyart - 2021 - Computation Noise in Human Learning Anddecision-Making Origin, Impact, FunctionBeth LloydNo ratings yet
- Neuroimage: Karl J. Friston, Joshua Kahan, Adeel Razi, Klaas Enno Stephan, Olaf SpornsDocument15 pagesNeuroimage: Karl J. Friston, Joshua Kahan, Adeel Razi, Klaas Enno Stephan, Olaf SpornsxcavierNo ratings yet
- (2016) Analysis of Neuronal Spike Trains DeconstructedDocument39 pages(2016) Analysis of Neuronal Spike Trains DeconstructedDiego Soto ChavezNo ratings yet
- BMC Neuroscience: Subsampling Effects in Neuronal Avalanche Distributions Recorded inDocument20 pagesBMC Neuroscience: Subsampling Effects in Neuronal Avalanche Distributions Recorded inFrontiersNo ratings yet
- 10 1162@jocna01602Document14 pages10 1162@jocna01602rachiddemnaterachidNo ratings yet
- Adaptive Critics and The Basal GangliaDocument19 pagesAdaptive Critics and The Basal GangliaLukkana VaraprasadNo ratings yet
- Agent-Based Simulation Tutorial - Simulation of Emergent Behavior and Differences Between Agent-Based Simulation and Discrete-Event SimulationDocument16 pagesAgent-Based Simulation Tutorial - Simulation of Emergent Behavior and Differences Between Agent-Based Simulation and Discrete-Event SimulationRamanNo ratings yet
- Kabaldin 2007Document6 pagesKabaldin 2007MoqaNo ratings yet
- Sensory Information On Brain StudyDocument16 pagesSensory Information On Brain StudyMario ŠestanjNo ratings yet
- Shokri-Kojori Et Al-2012-Scientific ReportsDocument7 pagesShokri-Kojori Et Al-2012-Scientific Reportsrashim_bey5853No ratings yet
- Surrogate Models For Oscillatory Systems Using Sparse Polynomial Chaos Expansions and Stochastic Time WarpingDocument45 pagesSurrogate Models For Oscillatory Systems Using Sparse Polynomial Chaos Expansions and Stochastic Time Warpingpatricia.santanareyesNo ratings yet
- UMass Amherst Faculty Publishes Research on Adaptive Critics and Basal GangliaDocument20 pagesUMass Amherst Faculty Publishes Research on Adaptive Critics and Basal Ganglianatsumi18No ratings yet
- Rus 2023 Smart Mater. Struct. 32 085030Document12 pagesRus 2023 Smart Mater. Struct. 32 085030Reslane KhassouaniNo ratings yet
- 2019_The Cortical Conductor Theory Towards Addressing Consciousness in Ai ModelsDocument11 pages2019_The Cortical Conductor Theory Towards Addressing Consciousness in Ai Modelsvincent.wienerroither1287No ratings yet
- LokDocument1 pageLokjigppNo ratings yet
- Perspective: How Does The Brain Solve Visual Object Recognition?Document20 pagesPerspective: How Does The Brain Solve Visual Object Recognition?Kaito KaleNo ratings yet
- Evolving Experience-Dependent Robust Behaviour in Embodied AgentsDocument12 pagesEvolving Experience-Dependent Robust Behaviour in Embodied Agentsjosef_151No ratings yet
- Attracting Dynamics of Frontal Cortex Ensembles During Memory-Guided Decision-MakingDocument19 pagesAttracting Dynamics of Frontal Cortex Ensembles During Memory-Guided Decision-MakingFrontiersNo ratings yet
- Movement Variability in LocomotionDocument20 pagesMovement Variability in LocomotionLaboratory in the WildNo ratings yet
- Phy-Inf AutoencodersDocument14 pagesPhy-Inf AutoencodersAman JalanNo ratings yet
- TMP F7 BDDocument24 pagesTMP F7 BDFrontiersNo ratings yet
- Epso - Meta-Heuristic: Best-Of-Two-Worlds TO Power System ProblemsDocument6 pagesEpso - Meta-Heuristic: Best-Of-Two-Worlds TO Power System Problemsquisi123No ratings yet
- 4500 Reading SkillacquisitionDocument14 pages4500 Reading SkillacquisitionÁdám GusztafikNo ratings yet
- Smni06 Ppi PDFDocument21 pagesSmni06 Ppi PDFLester IngberNo ratings yet
- COM417 Note Aug-21-2022Document25 pagesCOM417 Note Aug-21-2022oseni wunmiNo ratings yet
- 5W1HDocument2 pages5W1HMarcelo Geraldo TeixeiraNo ratings yet
- Jov 5 5 1Document29 pagesJov 5 5 1hNo ratings yet
- Brain and Cognition: Gesine Dreisbach, Rico FischerDocument5 pagesBrain and Cognition: Gesine Dreisbach, Rico FischerLight GreatNo ratings yet
- Macke 2009 GeneratingDocument28 pagesMacke 2009 GeneratingpastafarianboyNo ratings yet
- Permeability EstimationDocument7 pagesPermeability EstimationdagingoNo ratings yet
- Inferring The Function Performed by A Recurrent Neural NetworkDocument12 pagesInferring The Function Performed by A Recurrent Neural NetworkwashereNo ratings yet
- Highly Reactive Decision MakingDocument6 pagesHighly Reactive Decision MakingRobert HillNo ratings yet
- Structure Learning in Coupled Dynamical Systems and Dynamic Causal ModellingDocument20 pagesStructure Learning in Coupled Dynamical Systems and Dynamic Causal ModellingConstantin Von TsirlenNo ratings yet
- Neural Population Geometry An Approach For Understanding Biological and Artificial Neural NetworksDocument15 pagesNeural Population Geometry An Approach For Understanding Biological and Artificial Neural NetworksKarla ValderramaNo ratings yet
- Cummings Ispr How ImmersiveDocument13 pagesCummings Ispr How ImmersiveZoita MandilaNo ratings yet
- EEG Correlates of Fitts's Law During Preparation For ActionDocument11 pagesEEG Correlates of Fitts's Law During Preparation For Actionanoudalawneh96No ratings yet
- Chaotic Itinerancy in Coupled Dynamical RecognizersDocument27 pagesChaotic Itinerancy in Coupled Dynamical Recognizersaikau_69No ratings yet
- Neurral Representations of Moving SystemsDocument19 pagesNeurral Representations of Moving SystemsVimukthi WishwamithraNo ratings yet
- Mathematical Models For Dynamic, Multisensory Spatial Orientation PerceptionDocument26 pagesMathematical Models For Dynamic, Multisensory Spatial Orientation PerceptionPharuj RajborirugNo ratings yet
- A Mathematical ModelDocument6 pagesA Mathematical ModelKang Yong BinNo ratings yet
- Menas Kafatos Quantum Processes, Space-Time Representation and Brain Dynamics 0304137Document29 pagesMenas Kafatos Quantum Processes, Space-Time Representation and Brain Dynamics 0304137forizslNo ratings yet
- SysEng 5212-EE5370 Course Outline Spring 2017Document4 pagesSysEng 5212-EE5370 Course Outline Spring 2017Bojian CaoNo ratings yet
- Foreign Language Teaching MethodsDocument23 pagesForeign Language Teaching MethodsyuexiongNo ratings yet
- CBLM 1 - Lead Small TeamsDocument22 pagesCBLM 1 - Lead Small TeamsGillian Marbebe100% (10)
- Performance Rating Rubric For Impromptu Argumentative Speech Criteria Total ContentDocument2 pagesPerformance Rating Rubric For Impromptu Argumentative Speech Criteria Total ContentJohanna S-Nonato MapaNo ratings yet
- Parent Literacy NightDocument8 pagesParent Literacy Nightapi-240999165No ratings yet
- BUSI 300 SyllabusDocument5 pagesBUSI 300 SyllabusNatt 774No ratings yet
- DLL For Mapeh HsDocument26 pagesDLL For Mapeh HsJv Mercado Alcaraz75% (8)
- Group 2 - Jimat Air Dan ElektrikDocument5 pagesGroup 2 - Jimat Air Dan ElektrikSerene ChangNo ratings yet
- Assignment 1 - Philosophies of EducationDocument4 pagesAssignment 1 - Philosophies of Educationnovy jucille murilloNo ratings yet
- Pananaliksik 1st Quarter TosDocument8 pagesPananaliksik 1st Quarter TosJuvelyn AbuganNo ratings yet
- The Psychology of Effective CoachingDocument454 pagesThe Psychology of Effective CoachingLuchoNo ratings yet
- ISA - OTOP PROCEDURE FOR DistrictDocument95 pagesISA - OTOP PROCEDURE FOR Districtprincipals deskphNo ratings yet
- Learning Foreign LanguagesDocument2 pagesLearning Foreign LanguagesIldikó HodovánNo ratings yet
- Assessing Student Learning OutcomesDocument5 pagesAssessing Student Learning OutcomesJennifer Cortez TanNo ratings yet
- Multiplication of Fractions 4Document13 pagesMultiplication of Fractions 4api-631885934No ratings yet
- DLL Wk6-Quart-1-Physical EducationDocument8 pagesDLL Wk6-Quart-1-Physical Educationjulius meyNo ratings yet
- Introduction To Using Portfolios in The ClassroomDocument6 pagesIntroduction To Using Portfolios in The ClassroomPamela Nguyễn100% (1)
- Grade 4 Lesson Plan TemplateDocument2 pagesGrade 4 Lesson Plan TemplatehavolimNo ratings yet
- Birthday Card Lesson PlanDocument3 pagesBirthday Card Lesson PlanFabiano DurandNo ratings yet
- AREA V Entrepreneurship and EmployabilityDocument15 pagesAREA V Entrepreneurship and EmployabilityDennis Esik MaligayaNo ratings yet
- NOTICE LL.M. Sem. I II III IV Examination Form Repeater Students PDFDocument1 pageNOTICE LL.M. Sem. I II III IV Examination Form Repeater Students PDFShreya SinghNo ratings yet
- Piaget's Theory of Cognitive DevelopmentDocument11 pagesPiaget's Theory of Cognitive DevelopmentSabellano, Ann Marie C.No ratings yet
- D.el - Ed SyllabusDocument81 pagesD.el - Ed SyllabusPranay PandeyNo ratings yet
- Recognizing Limitations and PossibilitiesDocument2 pagesRecognizing Limitations and PossibilitiesLiezl O. Lerin100% (1)
- 2010-23352.FLCD204.Concept PaperDocument21 pages2010-23352.FLCD204.Concept PaperDina Mae TadeoNo ratings yet
- GE 113 - Building Skills For SuccessDocument4 pagesGE 113 - Building Skills For Successnimitparekh049No ratings yet
- COT 8 English SeptemberDocument5 pagesCOT 8 English SeptemberRB CatbaganNo ratings yet
- Adoption Letter Survey QuestionnaireDocument5 pagesAdoption Letter Survey QuestionnaireJandee OcampoNo ratings yet
- 656-665 Koloni Juni 22Document10 pages656-665 Koloni Juni 22sari_deRachmaNo ratings yet
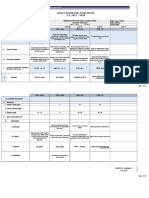
- SMEA 4th Quarter Leading Indicators 2022Document28 pagesSMEA 4th Quarter Leading Indicators 2022divine venus bucioNo ratings yet
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (54)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkFrom EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkRating: 4 out of 5 stars4/5 (7)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- Artificial Intelligence: A Guide for Thinking HumansFrom EverandArtificial Intelligence: A Guide for Thinking HumansRating: 4.5 out of 5 stars4.5/5 (30)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesFrom EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesRating: 4.5 out of 5 stars4.5/5 (13)
- Midjourney Mastery - The Ultimate Handbook of PromptsFrom EverandMidjourney Mastery - The Ultimate Handbook of PromptsRating: 4.5 out of 5 stars4.5/5 (2)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)From EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)No ratings yet
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (15)
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziFrom Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziNo ratings yet
- AI Money Machine: Unlock the Secrets to Making Money Online with AIFrom EverandAI Money Machine: Unlock the Secrets to Making Money Online with AINo ratings yet
- Power and Prediction: The Disruptive Economics of Artificial IntelligenceFrom EverandPower and Prediction: The Disruptive Economics of Artificial IntelligenceRating: 4.5 out of 5 stars4.5/5 (38)
- Your AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsFrom EverandYour AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsNo ratings yet
- AI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceFrom EverandAI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceRating: 4 out of 5 stars4/5 (2)
- 1200+ AI Prompts for Everyone.: Artificial Intelligence Prompt Library.From Everand1200+ AI Prompts for Everyone.: Artificial Intelligence Prompt Library.No ratings yet
- Make Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryFrom EverandMake Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryNo ratings yet
- 2084: Artificial Intelligence and the Future of HumanityFrom Everand2084: Artificial Intelligence and the Future of HumanityRating: 4 out of 5 stars4/5 (81)
- Demystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)From EverandDemystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)Rating: 4 out of 5 stars4/5 (1)
- 100+ Amazing AI Image Prompts: Expertly Crafted Midjourney AI Art Generation ExamplesFrom Everand100+ Amazing AI Image Prompts: Expertly Crafted Midjourney AI Art Generation ExamplesNo ratings yet