You might also like
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Iot L2 Fa20-Bce-046Document14 pagesIot L2 Fa20-Bce-046fa20-bce-046No ratings yet
- Exploring Arduino: Tools and Techniques for Engineering WizardryFrom EverandExploring Arduino: Tools and Techniques for Engineering WizardryRating: 4.5 out of 5 stars4.5/5 (5)
- Laboratory2 IoTDocument11 pagesLaboratory2 IoTfa20-bce-046No ratings yet
- Pratica 01 PDFDocument57 pagesPratica 01 PDFDenise AraújoNo ratings yet
- Arduino Uno Start Document 5 2022Document14 pagesArduino Uno Start Document 5 2022Eashvar SrinivasanNo ratings yet
- Arduino 101 FundamentalsDocument23 pagesArduino 101 FundamentalsSebastien Paul0% (1)
- Lecture Programming MicrocontrollersDocument22 pagesLecture Programming MicrocontrollersHectorLopezNo ratings yet
- Abdelkader Sallemine Andriamanalina Max Cohen Brown Jean Marie Vianney Haburukundo Angela OkuleyDocument16 pagesAbdelkader Sallemine Andriamanalina Max Cohen Brown Jean Marie Vianney Haburukundo Angela OkuleyDenil BouroasNo ratings yet
- Keypad ScanningDocument11 pagesKeypad Scanningrose8051No ratings yet
- Lab Exercise #1 - Getting Started: Dr. Timber Yuen Rev 0Document9 pagesLab Exercise #1 - Getting Started: Dr. Timber Yuen Rev 0Pae TankNo ratings yet
- IanDocument13 pagesIanChristian Cuevas100% (1)
- Laboratory2 Marking SchemeDocument12 pagesLaboratory2 Marking SchemeAmna EhtshamNo ratings yet
- iot module 2 materialDocument36 pagesiot module 2 materialteswart2002No ratings yet
- Tutorial 2 "Special Function Registers (SFR) and Bitwise Operations"Document11 pagesTutorial 2 "Special Function Registers (SFR) and Bitwise Operations"Men Keo RathaNo ratings yet
- Rangkaian Jam Digital MikrokontrolerDocument26 pagesRangkaian Jam Digital MikrokontrolerRahmad van BoschNo ratings yet
- Microcontroller Tutorials 1: What Is An Embedded System?Document12 pagesMicrocontroller Tutorials 1: What Is An Embedded System?KBSMANITNo ratings yet
- Arduino Programming (The Beginning)Document33 pagesArduino Programming (The Beginning)Dennis Feliciano VirayNo ratings yet
- Arduino IR Remort SensorDocument9 pagesArduino IR Remort SensorEE 503 AnAsNo ratings yet
- Activity 4 - Digital InputsDocument18 pagesActivity 4 - Digital InputsJohn Genrich PilartaNo ratings yet
- Digital Input ProgramDocument16 pagesDigital Input ProgramRUEL ALEJANDRONo ratings yet
- 6502 User ManualDocument52 pages6502 User ManualOmar KhayyamNo ratings yet
- Lesson 3:: Instructables ClassesDocument16 pagesLesson 3:: Instructables ClassesLandy AdianetNo ratings yet
- 05 Laboratory Exercise 5full-PermissionDocument10 pages05 Laboratory Exercise 5full-PermissionDomsNo ratings yet
- Minor 5sem Iot Manual w22Document25 pagesMinor 5sem Iot Manual w22Rupam BiswasNo ratings yet
- Auto-Gate ReportDocument21 pagesAuto-Gate Reportstamford_bridgeNo ratings yet
- Embedded Rev ThreeDocument12 pagesEmbedded Rev ThreeishmaelnjihiaNo ratings yet
- ArduinoDocument34 pagesArduinoLukeNo ratings yet
- I O Port Detailed StructureDocument7 pagesI O Port Detailed StructureNaveed Asif100% (1)
- Practical Exam DiagramDocument6 pagesPractical Exam DiagramVallery Dela CruzNo ratings yet
- Chapter 4Document34 pagesChapter 4Aman Ethio LijNo ratings yet
- Lab06 Sheet K02 Deb3013Document10 pagesLab06 Sheet K02 Deb3013Suhaimi ShahabNo ratings yet
- University Automoma of Queretaro Engineering Faculty: Digital System 2Document15 pagesUniversity Automoma of Queretaro Engineering Faculty: Digital System 2Carlos Eduardo Martínez Hernández100% (1)
- Lab BookDocument70 pagesLab Bookअमरेश झाNo ratings yet
- lab 1Document9 pageslab 1Malik YousafNo ratings yet
- Ee513 GRP 4 NewDocument15 pagesEe513 GRP 4 NewAmir SaniNo ratings yet
- Comsats University Microprocessor Systems & Interfacing EEE-342Document8 pagesComsats University Microprocessor Systems & Interfacing EEE-342Bilal HabibNo ratings yet
- ArdproDocument29 pagesArdproMd. Ibrahim HossainNo ratings yet
- NEC Format RemoteDocument15 pagesNEC Format RemoteMunish KaundalNo ratings yet
- Arduino LectureDocument52 pagesArduino LectureSỹ RonNo ratings yet
- Lab2: Programming Pic18F4550 Microcontroller With Button 1. ObjectivesDocument3 pagesLab2: Programming Pic18F4550 Microcontroller With Button 1. ObjectivesĐào Nhật TrungNo ratings yet
- 7led DiceDocument8 pages7led DiceMthokozisi Jet NgcoboNo ratings yet
- Arduino: Introduction To BmeDocument11 pagesArduino: Introduction To BmeYoussef MohamedNo ratings yet
- Arduino Inputs and Outputs Lab ReportDocument22 pagesArduino Inputs and Outputs Lab ReportArapat SyamsuddinNo ratings yet
- ARM: GPIO (General Purpose Input Output Register) - ..Document5 pagesARM: GPIO (General Purpose Input Output Register) - ..andresteve07No ratings yet
- Circuit Diagram of Mobile Controlled Home AppliancesDocument15 pagesCircuit Diagram of Mobile Controlled Home AppliancesSubhasreeKonarNo ratings yet
- Laboratory3 Marking SchemeDocument13 pagesLaboratory3 Marking SchemeAmna EhtshamNo ratings yet
- Lab 3 - Interrupts, low power and watchdog timerDocument13 pagesLab 3 - Interrupts, low power and watchdog timerAmna EhtshamNo ratings yet
- Arduino BootcampDocument47 pagesArduino Bootcampvinod varmaNo ratings yet
- CPS_LAB_REPORT_FINAL (1)Document38 pagesCPS_LAB_REPORT_FINAL (1)devikam230354ecNo ratings yet
- Basic Arduino NotesDocument11 pagesBasic Arduino NotesdanielNo ratings yet
- 4 Relays Module ENGDocument17 pages4 Relays Module ENGwilsnicoNo ratings yet
- IO InterfacingDocument7 pagesIO Interfacing47 Bhushan BariNo ratings yet
- 4 - 1 Arduino Basic Functions - 1Document7 pages4 - 1 Arduino Basic Functions - 1ankita81123singhNo ratings yet
- Arduino Thermometer With 7-Segment LEDDocument26 pagesArduino Thermometer With 7-Segment LEDRohit AdnaikNo ratings yet
- Nota ArduinoDocument7 pagesNota ArduinoMior Mohamad Amin bin jamaludinNo ratings yet
- Lab 3Document20 pagesLab 3Loredana MariaNo ratings yet
- Arduino Kids CourseDocument48 pagesArduino Kids CourseRoland von KurnatowskiNo ratings yet
- Arduino LAB Manual PDFDocument25 pagesArduino LAB Manual PDFjose_mario1128100% (5)
- Introduction To Exploit Development (Buffer Overflows) PDFDocument46 pagesIntroduction To Exploit Development (Buffer Overflows) PDFRushikesh ThombreNo ratings yet
- MATLAB Functions for LabJack U12 CommunicationDocument18 pagesMATLAB Functions for LabJack U12 CommunicationgennarinomingNo ratings yet
- Harmonic Analysis (1910)Document174 pagesHarmonic Analysis (1910)Magdy Hemeda100% (2)
- Keywords: Materials Development, Multilingual Education, Mother Tongue-Based MultilingualDocument22 pagesKeywords: Materials Development, Multilingual Education, Mother Tongue-Based MultilingualMar Jhon AcoribaNo ratings yet
- Teen Explorer 7, Kartkęwki A, Grupa 2 (Przeciągnięte) (Przeciągnięte)Document4 pagesTeen Explorer 7, Kartkęwki A, Grupa 2 (Przeciągnięte) (Przeciągnięte)Sandro FosachecaNo ratings yet
- BLOOMFIELD, M. W. Allegory As InterpretationDocument18 pagesBLOOMFIELD, M. W. Allegory As InterpretationRebecca HernandezNo ratings yet
- LITERARY TEXT AS POETIC STRUCTUREDocument12 pagesLITERARY TEXT AS POETIC STRUCTURETania VolkovaNo ratings yet
- Inversor de Sursa LovatoDocument16 pagesInversor de Sursa LovatoRifki FajriNo ratings yet
- GST 212 - Philosophy and LogicDocument27 pagesGST 212 - Philosophy and LogicekeoyindoNo ratings yet
- Praktikum Basis Data 1Document4 pagesPraktikum Basis Data 1sengHansunNo ratings yet
- Personality Type Diagnostics: Utilizing Facial Features by Kevin ClarksonDocument47 pagesPersonality Type Diagnostics: Utilizing Facial Features by Kevin ClarksonKevinClarkson67% (3)
- Generalized Wave Parameter For Rules Formulae: September 2016Document9 pagesGeneralized Wave Parameter For Rules Formulae: September 2016Youngkook KimNo ratings yet
- Use Sysprep With GhostDocument6 pagesUse Sysprep With Ghostapi-3748863100% (3)
- Retrieve and Filter Data from Database with SQLDocument19 pagesRetrieve and Filter Data from Database with SQLcendy oktariNo ratings yet
- WP AssignmentDocument21 pagesWP Assignmentrotiwi1096No ratings yet
- Sqltxplain - Part IDocument35 pagesSqltxplain - Part IMickeyDaisyNo ratings yet
- SAT Practice Test #1 Answer ExplanationsDocument45 pagesSAT Practice Test #1 Answer Explanationsichikkala100% (1)
- The Knights Tale by Geoffrey ChaucerDocument2 pagesThe Knights Tale by Geoffrey Chaucerapi-222876920No ratings yet
- Gambaran Sindrom Afasia Kronik Dan Perubahannya Pasca TerapiDocument9 pagesGambaran Sindrom Afasia Kronik Dan Perubahannya Pasca TerapiNabila SalsabillNo ratings yet
- Workshop On Syntax - CECARDocument3 pagesWorkshop On Syntax - CECARWALTER100% (1)
- SEN3006-Software Architecture: Asst. Prof. Serkan AyvazDocument406 pagesSEN3006-Software Architecture: Asst. Prof. Serkan AyvazdrogoNo ratings yet
- Lemery Colleges, Inc.: College DepartmentDocument8 pagesLemery Colleges, Inc.: College DepartmentHarrenNo ratings yet
- Madani QaidaDocument73 pagesMadani QaidaHussainNo ratings yet
- Benchmarking Runs On CDH5.4 - Detailed ReportDocument9 pagesBenchmarking Runs On CDH5.4 - Detailed ReportheshyNo ratings yet
- T1 Dynamic Memory AllocationDocument62 pagesT1 Dynamic Memory AllocationBharani DaranNo ratings yet
- EMV v4.2 Book 3Document239 pagesEMV v4.2 Book 3systemcodingNo ratings yet
- Sentence Structure Session OutlineDocument2 pagesSentence Structure Session OutlineRakhshanda FawadNo ratings yet
- MySQL Tutorial for BeginnersDocument44 pagesMySQL Tutorial for BeginnersRavi KumarNo ratings yet
- Analisis Pemasaran Buah Naga di BanyuwangiDocument18 pagesAnalisis Pemasaran Buah Naga di BanyuwangiAna RainasiarNo ratings yet
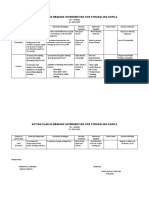
- Action Plan in Reading Intervention For Struggling PupilsDocument2 pagesAction Plan in Reading Intervention For Struggling PupilsJollibee McDonaldsNo ratings yet