You might also like
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningFrom EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningNo ratings yet
- Exp 3Document9 pagesExp 3Swastik guptaNo ratings yet
- ANN Models ExplainedDocument42 pagesANN Models ExplainedAakansh ShrivastavaNo ratings yet
- Digital Signal Processing Lab Manual: Iii B.Tech I SemDocument50 pagesDigital Signal Processing Lab Manual: Iii B.Tech I Sem19501A0459 MAKANA PRASANNA LAKSHMINo ratings yet
- Soft Computing Lab FileDocument26 pagesSoft Computing Lab Fileshrivastavasachin090No ratings yet
- Lab Manual Soft ComputingDocument44 pagesLab Manual Soft ComputingAvicii23 AviciiNo ratings yet
- P 0.5:0.01:3 T Sin (P. 2-15 P+3) - Sin (P) . 2Document3 pagesP 0.5:0.01:3 T Sin (P. 2-15 P+3) - Sin (P) . 2tinashe murwiraNo ratings yet
- Manual For Neural and Matlab ApplicationsDocument37 pagesManual For Neural and Matlab ApplicationsKiran Jot SinghNo ratings yet
- 4 Multilayer Perceptrons and Radial Basis FunctionsDocument6 pages4 Multilayer Perceptrons and Radial Basis FunctionsVivekNo ratings yet
- NN ExamplesDocument91 pagesNN Examplesnguyenhoangan.13dt2No ratings yet
- Lab Manual Soft ComputingDocument44 pagesLab Manual Soft ComputingAnuragGupta100% (1)
- NN Examples MatlabDocument91 pagesNN Examples MatlabAnonymous 1dVLJSVhtrNo ratings yet
- Neural Net 3rdclassDocument35 pagesNeural Net 3rdclassUttam SatapathyNo ratings yet
- Assignment No. 03 Perceptron learning rule_and_Adaline_ error surfaceDocument3 pagesAssignment No. 03 Perceptron learning rule_and_Adaline_ error surfacecheemashuja43No ratings yet
- Multilayered Network ArchitecturesDocument34 pagesMultilayered Network Architecturesaniruthan venkatavaradhanNo ratings yet
- Sheet #6 Ensemble + Neural Nets + Linear Regression + Backpropagation + CNNDocument4 pagesSheet #6 Ensemble + Neural Nets + Linear Regression + Backpropagation + CNNrowaida elsayedNo ratings yet
- Neural NetworkDocument44 pagesNeural NetworkVishnu ChNo ratings yet
- 13 - Chapter 5 PDFDocument40 pages13 - Chapter 5 PDFBouchouicha KadaNo ratings yet
- Willo - MLX PDF Part3Document5 pagesWillo - MLX PDF Part3tinashe murwiraNo ratings yet
- ANN Lab Manual-2Document35 pagesANN Lab Manual-2segnumutraNo ratings yet
- ANN Lab ManualDocument35 pagesANN Lab Manualsegnumutra100% (3)
- DNN Cluster S2 22 MidSem MakeupDocument7 pagesDNN Cluster S2 22 MidSem MakeuprahulsgaykeNo ratings yet
- NNDL File 1-6Document27 pagesNNDL File 1-6jamesaby94No ratings yet
- Improving The Rate of Convergence of The Backpropagation Algorithm For Neural Networks Using Boosting With MomentumDocument6 pagesImproving The Rate of Convergence of The Backpropagation Algorithm For Neural Networks Using Boosting With MomentumNikhil Ratna ShakyaNo ratings yet
- Ziegler Nichols Matlab PDFDocument8 pagesZiegler Nichols Matlab PDFMarco Arcos100% (2)
- Green University of Bangladesh: Department of Electrical and Electronic EngineeringDocument2 pagesGreen University of Bangladesh: Department of Electrical and Electronic EngineeringSanta HossenNo ratings yet
- SIGNALS-SYSTEMS LAB ManualDocument44 pagesSIGNALS-SYSTEMS LAB Manualmahendra161024No ratings yet
- Tutoriales Control NeurodifusoDocument47 pagesTutoriales Control NeurodifusoGaby ZúñigaNo ratings yet
- Name: Zulfiqar Ali.: Department of Electronic Engineering University of Engineering and Technology Abbottabad CampusDocument15 pagesName: Zulfiqar Ali.: Department of Electronic Engineering University of Engineering and Technology Abbottabad CampusZulfiqar AliNo ratings yet
- DSP Lab ManualDocument75 pagesDSP Lab ManualRyan951No ratings yet
- Exercise 1 Instruction PcaDocument9 pagesExercise 1 Instruction PcaHanif IshakNo ratings yet
- Supervised Learning and Backpropagation in Neural NetworksDocument40 pagesSupervised Learning and Backpropagation in Neural Networksمحمد علي حسونةNo ratings yet
- Analyzing Classification of Data Using a Competitive Learning Neural NetworkDocument3 pagesAnalyzing Classification of Data Using a Competitive Learning Neural Network510618083 ABHIJNANMAITINo ratings yet
- Lab 4 Etapi 2.mlx PartDocument5 pagesLab 4 Etapi 2.mlx Parttinashe murwiraNo ratings yet
- Matlab Practical FileDocument19 pagesMatlab Practical FileAmit WaliaNo ratings yet
- Lab#4 ReportDocument14 pagesLab#4 ReportShameen MazharNo ratings yet
- Neural Networks: MATLABDocument91 pagesNeural Networks: MATLABlaerciomosNo ratings yet
- DSD RTL Coding Lec8Document31 pagesDSD RTL Coding Lec8Arshad RasheedNo ratings yet
- NEURAL NETWORKS Basics Using MatlabDocument51 pagesNEURAL NETWORKS Basics Using Matlabsreemd100% (2)
- Industrial Computing Artificial Neural Network Eng. Byron Lima MSCDocument13 pagesIndustrial Computing Artificial Neural Network Eng. Byron Lima MSCRandy romero100% (1)
- NN Lab2Document5 pagesNN Lab2Anne WanningenNo ratings yet
- Lecture 14 - Associative Neural Networks Using MatlabDocument6 pagesLecture 14 - Associative Neural Networks Using MatlabAmmar AlkindyNo ratings yet
- Lab 1Document11 pagesLab 1Maitha SaeedNo ratings yet
- 8 9 2021 16 55 4 359 GradientDesentDocument4 pages8 9 2021 16 55 4 359 GradientDesentDekyi ChoezomNo ratings yet
- HW 7Document4 pagesHW 7adithya604No ratings yet
- Kassahun Hassen Individual AssignmentDocument20 pagesKassahun Hassen Individual AssignmentHajaManNo ratings yet
- Supervised Learning Networks: Perceptron and BackpropagationDocument22 pagesSupervised Learning Networks: Perceptron and BackpropagationmohitNo ratings yet
- Experiment 1Document15 pagesExperiment 1RamaDinakaran100% (1)
- Lab - Manual - Soft - Computing - PDFDocument39 pagesLab - Manual - Soft - Computing - PDFpradeep mahateNo ratings yet
- exp4 (1)Document9 pagesexp4 (1)yallasanjay1No ratings yet
- Applicable Artificial Intelligence Back Propagation: Academic Session 2022/2023Document20 pagesApplicable Artificial Intelligence Back Propagation: Academic Session 2022/2023muhammed suhailNo ratings yet
- ANN MatlabDocument10 pagesANN MatlabVikas MahorNo ratings yet
- SESA6061 Coursework 2 (Hand in via e-assignments by Wed 4th Dec 23:00Document8 pagesSESA6061 Coursework 2 (Hand in via e-assignments by Wed 4th Dec 23:00Giulio MarkNo ratings yet
- Advanced Numerical and Semi-Analytical Methods for Differential EquationsFrom EverandAdvanced Numerical and Semi-Analytical Methods for Differential EquationsNo ratings yet
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 2.5 out of 5 stars2.5/5 (2)
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Samsung CAC Duct S Brochure 20140729 0Document16 pagesSamsung CAC Duct S Brochure 20140729 0Callany AnycallNo ratings yet
- IN Sneddon - The Distribution of Stress in The Neighborhood of A Crack in An Elastic Solid - For Shape Factor QDocument32 pagesIN Sneddon - The Distribution of Stress in The Neighborhood of A Crack in An Elastic Solid - For Shape Factor QShaun Raphael LeeNo ratings yet
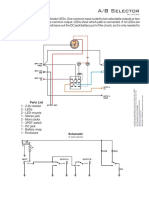
- A/B Selector: Parts ListDocument1 pageA/B Selector: Parts ListGiannis zmNo ratings yet
- IIT-JEE - 2020 - 2021: BY Referral CodeDocument31 pagesIIT-JEE - 2020 - 2021: BY Referral CodeBishwadeep RoyNo ratings yet
- Section Properties: Properties of Tata Structura (Rectangular Hollow Sections) YST 310 GradeDocument2 pagesSection Properties: Properties of Tata Structura (Rectangular Hollow Sections) YST 310 GradeSudipta SarkarNo ratings yet
- Bank Statement QueryDocument13 pagesBank Statement QuerySiddiq MohammedNo ratings yet
- National Talent Search Examination Path to SuccessDocument25 pagesNational Talent Search Examination Path to SuccessSudhanshuNo ratings yet
- Magnetic Field WorksheetDocument6 pagesMagnetic Field WorksheetmayaNo ratings yet
- Java MCQDocument6 pagesJava MCQDeepika VashisthNo ratings yet
- HeatDocument31 pagesHeatnicky1213a100% (1)
- Pokretljivost Jona U Vodenim RastvorimaDocument12 pagesPokretljivost Jona U Vodenim RastvorimaSilvester KolicNo ratings yet
- Angular Momentum and Kinetic EnergyDocument15 pagesAngular Momentum and Kinetic Energyimfendi100% (1)
- 1992 - Niobium Additions in HP Heat-Resistant Cast Stainless SteelsDocument10 pages1992 - Niobium Additions in HP Heat-Resistant Cast Stainless SteelsLuiz Gustavo LimaNo ratings yet
- Application Notes UC3710TDocument16 pagesApplication Notes UC3710TSHAHID_71No ratings yet
- Junta de Expanción Macoga PDFDocument2 pagesJunta de Expanción Macoga PDFRaul SebastiamNo ratings yet
- DRIVINGDocument4 pagesDRIVINGMarcelino ZarateNo ratings yet
- ApeosPort C3060 C2560 C2060 BrochureDocument8 pagesApeosPort C3060 C2560 C2060 BrochureNischit Kunwar ChhetriNo ratings yet
- Electrical network management with MV substation control and Modbus communicationDocument45 pagesElectrical network management with MV substation control and Modbus communicationMaximiliano SanchezNo ratings yet
- ChemistryDocument84 pagesChemistryMaria Regina SantosNo ratings yet
- Laguna Kosmetik MC1 PlusDocument2 pagesLaguna Kosmetik MC1 PlusLaguna Karaoke TarakanNo ratings yet
- 1 X SeriesDocument321 pages1 X SeriesJair Merino Aguirre100% (1)
- Single Line SymbolsDocument26 pagesSingle Line SymbolsjoydeepNo ratings yet
- TM 5-2430-200-10Document196 pagesTM 5-2430-200-10Advocate100% (1)
- ACE Brochure - Final - June - 4 - 2013 PDFDocument16 pagesACE Brochure - Final - June - 4 - 2013 PDFOrlando FloresNo ratings yet
- Week 5 Lecture Pigeonhole Principle 1Document58 pagesWeek 5 Lecture Pigeonhole Principle 1CODING with ASAD.No ratings yet
- Modeling Continuous Systems Using Modified Petri Nets ModelDocument5 pagesModeling Continuous Systems Using Modified Petri Nets ModelfatihaNo ratings yet
- Some Mathematical AnagramsDocument4 pagesSome Mathematical AnagramsSergiu CoditoNo ratings yet
- Advanced Process Modeling 1Document41 pagesAdvanced Process Modeling 1mtahir777945No ratings yet
- Evaluación 1T1 HLDocument3 pagesEvaluación 1T1 HLIllojuanNo ratings yet
- Power MOSFET Stage For Boost Converters: I 35 A V 500 V R 0.12Document4 pagesPower MOSFET Stage For Boost Converters: I 35 A V 500 V R 0.12Franklyn AcevedoNo ratings yet