You might also like
- Rotational Motion LabDocument8 pagesRotational Motion LabjehrNo ratings yet
- IntroductionDocument9 pagesIntroductionJM085No ratings yet
- CH 11 Extra PracticeDocument10 pagesCH 11 Extra PracticeGgg BibleeNo ratings yet
- Physics 1 Recitation 7 RotationDocument10 pagesPhysics 1 Recitation 7 RotationAlexNo ratings yet
- Rotational Inertia: Ma T MG FDocument8 pagesRotational Inertia: Ma T MG FharpreetNo ratings yet
- GyroscopeDocument7 pagesGyroscopeRajesh SarkarNo ratings yet
- Rotational Dynamics and Rotational Inertia v2Document7 pagesRotational Dynamics and Rotational Inertia v2aDnan haiDerNo ratings yet
- PHY133 Angular MomentumDocument6 pagesPHY133 Angular MomentumAngel RodriguezNo ratings yet
- Experiment 10: Determining Moments of InertiaDocument5 pagesExperiment 10: Determining Moments of InertiaADAM DANISH BAQIR ROSMANNo ratings yet
- PHYS 2425 Exp 8 ManualDocument7 pagesPHYS 2425 Exp 8 ManualMulangira MulangiraNo ratings yet
- P2132000 Angulos de EulerDocument4 pagesP2132000 Angulos de EulerDenis PANo ratings yet
- Sr. No. Practical 1: Static and Dynamic Balancing of Rotating MassesDocument21 pagesSr. No. Practical 1: Static and Dynamic Balancing of Rotating MassesFa CaNo ratings yet
- Moment of Inertia of a Tennis Ball ExperimentDocument8 pagesMoment of Inertia of a Tennis Ball ExperimentShaheer ShahzadNo ratings yet
- The Torsional OscillatorDocument4 pagesThe Torsional OscillatorAlex McGintyNo ratings yet
- Lab 11 Rotational Inertia of Disk and Ring PDFDocument5 pagesLab 11 Rotational Inertia of Disk and Ring PDFJEPHTAH LosNo ratings yet
- Rotational InertiaDocument4 pagesRotational Inertia이지민No ratings yet
- Rotational Motion 8.0Document11 pagesRotational Motion 8.0adnan khanNo ratings yet
- 37 Rotational InertiaDocument4 pages37 Rotational InertiaMateo NegroNo ratings yet
- Wilberforce PendulumDocument9 pagesWilberforce PendulumLeo KutsNo ratings yet
- ENGG 1300 Engineering Mechanics 1: Lab: 2 - Motion of A Rolling DiskDocument7 pagesENGG 1300 Engineering Mechanics 1: Lab: 2 - Motion of A Rolling DiskMallgi34No ratings yet
- Physics 2305 Lab 11: Torsion PendulumDocument14 pagesPhysics 2305 Lab 11: Torsion PendulumJason LeeNo ratings yet
- Lab Report 10Document5 pagesLab Report 10Vishal RavikumarNo ratings yet
- The Torsion Pendulum (One or Two Weights)Document10 pagesThe Torsion Pendulum (One or Two Weights)DIPESHNo ratings yet
- Chapter 17Document89 pagesChapter 17thulf100% (2)
- Lab3a 2019Document10 pagesLab3a 2019Olivia PowerNo ratings yet
- 9 AngularMomentumDocument3 pages9 AngularMomentumAnkit Singh PayalNo ratings yet
- Chapter 9-Static EquilibriumDocument34 pagesChapter 9-Static EquilibriumGemechisNo ratings yet
- Ch09 SSM 070904Document26 pagesCh09 SSM 070904VinhTranNo ratings yet
- Measure Torsion Constant of a RodDocument3 pagesMeasure Torsion Constant of a RodARSLANNo ratings yet
- PCS130 SimpleHarmonic 0Document7 pagesPCS130 SimpleHarmonic 0Ekan AhmadNo ratings yet
- Torsional - PendulumDocument5 pagesTorsional - Pendulumxogus6216No ratings yet
- Measure vibrations of cantilever beam and mass-spring systemDocument10 pagesMeasure vibrations of cantilever beam and mass-spring systemArun KumarNo ratings yet
- Balancing of Rotating MassesDocument8 pagesBalancing of Rotating Massesਰਮਨਦੀਪ ਸਿੰਘNo ratings yet
- Civil Lab ManualDocument17 pagesCivil Lab ManualShakil KhanNo ratings yet
- Experiment 07: Momentum and CollisionsDocument32 pagesExperiment 07: Momentum and CollisionseviroyerNo ratings yet
- Phy 101 Lecture Note 5Document10 pagesPhy 101 Lecture Note 5bukolaesan48No ratings yet
- Understanding Rigid Body MotionDocument21 pagesUnderstanding Rigid Body MotionMohammed Aftab AhmedNo ratings yet
- Torque-Parallel Force - George Ricarrson 2501987261Document16 pagesTorque-Parallel Force - George Ricarrson 2501987261George RYNo ratings yet
- Rotational Systems LabDocument4 pagesRotational Systems LabAlejandra M. AvilaNo ratings yet
- Expt #3 (Circular Motion) Phys 1601 Fall 2019Document3 pagesExpt #3 (Circular Motion) Phys 1601 Fall 2019HossNo ratings yet
- MM 3rd Lab ReportDocument9 pagesMM 3rd Lab ReportIbrahim AfridiNo ratings yet
- Static Mechanical System Section1: Stress, Shear Force and Bending MomentDocument17 pagesStatic Mechanical System Section1: Stress, Shear Force and Bending MomentHadhi Hassan KhanNo ratings yet
- BMM3533 - Two Degree of Freedom of Torsional Free Vibration SystemDocument12 pagesBMM3533 - Two Degree of Freedom of Torsional Free Vibration SystemSyazaNo ratings yet
- Structural Analysis With Strain Gage Measurements: Experiment 1Document7 pagesStructural Analysis With Strain Gage Measurements: Experiment 1Yılmaz GürpınarNo ratings yet
- 16.07 Dynamics: Massachusetts Institute of TechnologyDocument14 pages16.07 Dynamics: Massachusetts Institute of TechnologyAdolfo Ricardo Piminchumo SausaNo ratings yet
- Bending Lab Stresses and DeflectionsDocument7 pagesBending Lab Stresses and DeflectionsAnnemarie SummersNo ratings yet
- Chapter 8-: Rotational MotionDocument34 pagesChapter 8-: Rotational MotionSaadNo ratings yet
- GRABSUM School Inc. Name: Grade Level and Section: 12 - STEMDocument6 pagesGRABSUM School Inc. Name: Grade Level and Section: 12 - STEMWendell CapiliNo ratings yet
- Chapter 6.00A Physical Problem For Regression General EngineeringDocument4 pagesChapter 6.00A Physical Problem For Regression General EngineeringLauren PerryNo ratings yet
- College Physics EOC Questions Chapter 8Document9 pagesCollege Physics EOC Questions Chapter 8Sri RNo ratings yet
- Machine Dynamics Lab ManualDocument18 pagesMachine Dynamics Lab ManualRishi ShuklaNo ratings yet
- Applied Mechanics Lab - PGBDDFDocument41 pagesApplied Mechanics Lab - PGBDDFyahska1305No ratings yet
- Zero-length Springs and Slinky Coils TheoryDocument14 pagesZero-length Springs and Slinky Coils TheoryArsh DhawanNo ratings yet
- рисунки PDFDocument18 pagesрисунки PDFLeo KutsNo ratings yet
- Translational ("Linear") Motion Rotational Motion: CM CMDocument5 pagesTranslational ("Linear") Motion Rotational Motion: CM CMRishabh D'SouzaNo ratings yet
- Lab 2 - Torsional Test of A Round Steel BarDocument9 pagesLab 2 - Torsional Test of A Round Steel BarTaha KhanNo ratings yet
- Lab5a Fa10Document4 pagesLab5a Fa10alexlenevez_12130% (1)
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
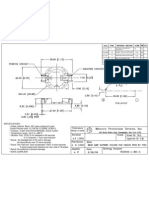
- 10/22/05 B T.B. B.S. 8/11/07 C T.B. B.S. 11/21/07 Dim. 5.30 Was 5.00 T.B. B.S. DDocument1 page10/22/05 B T.B. B.S. 8/11/07 C T.B. B.S. 11/21/07 Dim. 5.30 Was 5.00 T.B. B.S. DyogpanditNo ratings yet
- Exercise: Exercise 1: Choose The Best Answer To Complete The Blank in Each of The FollowingDocument3 pagesExercise: Exercise 1: Choose The Best Answer To Complete The Blank in Each of The FollowingNgọc Phương Linh LêNo ratings yet
- Letter of Mehran Tavakoli Keshe - 18.4.2014Document3 pagesLetter of Mehran Tavakoli Keshe - 18.4.2014jc200312127869100% (1)
- Kinematics in Two Dimensions: Projectile and Circular MotionDocument11 pagesKinematics in Two Dimensions: Projectile and Circular MotionKapelsuNo ratings yet
- Python GUI For Impedance Spectroscopy Analysis: Scientia Cum Industria August 2018Document6 pagesPython GUI For Impedance Spectroscopy Analysis: Scientia Cum Industria August 2018Tomás de AlmeidaNo ratings yet
- Valvulas de Muestreos de Filtros Larox y Panenevis LVC - Lva - LVHDocument36 pagesValvulas de Muestreos de Filtros Larox y Panenevis LVC - Lva - LVHMark BukerNo ratings yet
- Comparison of Bearing Capacity Equations For Vertical Central LoadingDocument7 pagesComparison of Bearing Capacity Equations For Vertical Central LoadingCepiNo ratings yet
- BASIC CAL WEEK 7 9 ReviewerDocument9 pagesBASIC CAL WEEK 7 9 ReviewerJuan Miguel Rolyn HinguilloNo ratings yet
- DatasheetDocument35 pagesDatasheetHeru susantoNo ratings yet
- Cantilever Slab DesignDocument2 pagesCantilever Slab Designsibu_bhusalNo ratings yet
- Heat ModelingDocument284 pagesHeat ModelingfreewareNo ratings yet
- Create Sheet Metal Bracket in SOLIDWORKSDocument16 pagesCreate Sheet Metal Bracket in SOLIDWORKSChokri AtefNo ratings yet
- Liquid Cooled Heavy Duty Inductance Unit EC-LTS1200-410: User GuideDocument44 pagesLiquid Cooled Heavy Duty Inductance Unit EC-LTS1200-410: User GuideKarina Vega AlvaradoNo ratings yet
- Guía de ReusabilidadDocument51 pagesGuía de ReusabilidadJulio BenavidesNo ratings yet
- SOLUTION OF Lens, Mirror, RefractionDocument4 pagesSOLUTION OF Lens, Mirror, RefractionRumpa DasNo ratings yet
- Mathematics SBADocument15 pagesMathematics SBADeath ValleyNo ratings yet
- Pub - Glasses and Amorphous Materials PDFDocument775 pagesPub - Glasses and Amorphous Materials PDFAMS Lab.No ratings yet
- Bphysics General Instructions: Show Your Solutions Clearly and Box Your Final Answer. Use One Side of Your Paper OnlyDocument2 pagesBphysics General Instructions: Show Your Solutions Clearly and Box Your Final Answer. Use One Side of Your Paper OnlyELLA JOY YEENo ratings yet
- Analysis of BeamsDocument14 pagesAnalysis of Beamsمحسن عبدالله البركيNo ratings yet
- IGCSE Cam Chemistry P2 Exam-Mate Text BookDocument439 pagesIGCSE Cam Chemistry P2 Exam-Mate Text BookAdeen100% (1)
- Ch. 18 Fundamentals of Spectrophotometry: What Is Spectroscopy?Document4 pagesCh. 18 Fundamentals of Spectrophotometry: What Is Spectroscopy?JaiNo ratings yet
- Digitrate Pro Digital Burettes Accuracy to 0.2Document1 pageDigitrate Pro Digital Burettes Accuracy to 0.2Anonymous 6N7hofVNo ratings yet
- Vickery Watkins 1964 ScrutonNoDocument15 pagesVickery Watkins 1964 ScrutonNoFloydNo ratings yet
- Design of Seismic-Resistant Steel Building Structures: 3. Concentrically Braced FramesDocument123 pagesDesign of Seismic-Resistant Steel Building Structures: 3. Concentrically Braced FramesMarvin MessiNo ratings yet
- Downhole Tools SpecificationsDocument32 pagesDownhole Tools Specificationsnimish_845588906No ratings yet
- Shelly Kegan DeathDocument5 pagesShelly Kegan Deathmaqw123No ratings yet
- Immortality Mortality Divine ParadoxDocument33 pagesImmortality Mortality Divine ParadoxNivek Johnson100% (1)
- Physical Science SHS 24.1 Worksheet 3Document2 pagesPhysical Science SHS 24.1 Worksheet 3Ser Louis Fetilo FabunanNo ratings yet
- Numerical Modelling of Laterally Loaded Single Pile: A.Lakshmi RishithaDocument102 pagesNumerical Modelling of Laterally Loaded Single Pile: A.Lakshmi RishithaAkhilesh Kumar SinghNo ratings yet
- WB Harmonic Shaker TableDocument10 pagesWB Harmonic Shaker TablenetkasiaNo ratings yet