You might also like
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Multilevel Inverter With Space Vector Modulation Intelligence Direct Torque Control of Induction Motor - IET Power ElectronicsDocument9 pagesMultilevel Inverter With Space Vector Modulation Intelligence Direct Torque Control of Induction Motor - IET Power ElectronicsAndre LimaNo ratings yet
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourNo ratings yet
- Paper - 5 Noise MinimizationDocument5 pagesPaper - 5 Noise MinimizationLTE002No ratings yet
- Speed Control of BLDC Motor Using DSP: 1 4 1 JNTUH Hyderabad, India 2 JNTUH Hyderabad, IndiaDocument5 pagesSpeed Control of BLDC Motor Using DSP: 1 4 1 JNTUH Hyderabad, India 2 JNTUH Hyderabad, IndiapravnkumarNo ratings yet
- Thesis On Direct Torque ControlDocument6 pagesThesis On Direct Torque Controlericabaldwinpittsburgh100% (2)
- Adaptive Bandwidth Approach ON DTC Controlled Induction MotorDocument9 pagesAdaptive Bandwidth Approach ON DTC Controlled Induction MotorijicsjournalNo ratings yet
- Direct Torque Control For Induction Motor Using Intelligent Artificial Neural Network TechniqueDocument7 pagesDirect Torque Control For Induction Motor Using Intelligent Artificial Neural Network TechniqueInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Sensorless FOC on 8-bit MCUs delivers high-performance motor controlDocument3 pagesSensorless FOC on 8-bit MCUs delivers high-performance motor controlasASasASNo ratings yet
- Modelling and Control of A Novel Zero-Current-Switching Inverter With Sinusoidal Current OutputDocument11 pagesModelling and Control of A Novel Zero-Current-Switching Inverter With Sinusoidal Current OutputSuresh KumarNo ratings yet
- Improved Sensorless Direct Torque Control of Induction Motor Using Fuzzy Logic and Neural Network Based Duty Ratio ControllerDocument12 pagesImproved Sensorless Direct Torque Control of Induction Motor Using Fuzzy Logic and Neural Network Based Duty Ratio ControllerIAES IJAINo ratings yet
- A Digital Current-Mode Control Technique For DC-DC ConvertersDocument21 pagesA Digital Current-Mode Control Technique For DC-DC ConvertersShenbaga LakshmiNo ratings yet
- 30th Annual IEEE Conference on Industrial ElectronicsDocument6 pages30th Annual IEEE Conference on Industrial Electronicsdjoo77No ratings yet
- Comparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveDocument8 pagesComparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveMatanAbutbulNo ratings yet
- Direct Torque Control PHD ThesisDocument7 pagesDirect Torque Control PHD Thesisheathervargaspeoria100% (2)
- A Variable-Speed, Sensorless, Induction Motor Drive Using DC Link MeasurementsDocument6 pagesA Variable-Speed, Sensorless, Induction Motor Drive Using DC Link Measurementsgowtam_raviNo ratings yet
- Dynamic Performance and Analysis of Direct Torque Control Method Based On DSP For PMSM DrivesDocument5 pagesDynamic Performance and Analysis of Direct Torque Control Method Based On DSP For PMSM DrivesRaspy ReddyNo ratings yet
- Thesis Direct Torque ControlDocument7 pagesThesis Direct Torque Controljuliemoralesomaha100% (2)
- High Performance Direct Torque Control of Induction Motor Drives Using Space Vector ModulationDocument9 pagesHigh Performance Direct Torque Control of Induction Motor Drives Using Space Vector ModulationMefisto ElNo ratings yet
- Direct Torque Control of Induction Motor Using Artificial Neural NetworkDocument7 pagesDirect Torque Control of Induction Motor Using Artificial Neural NetworkMohamed SomaiNo ratings yet
- An Efficient Predictive Current Control Strategy For A Four-Level Open-End Winding Induction Motor DriveDocument10 pagesAn Efficient Predictive Current Control Strategy For A Four-Level Open-End Winding Induction Motor DriveAbd DawaraNo ratings yet
- Microcontroller Controlled BLDC Drive for Electric VehiclesDocument4 pagesMicrocontroller Controlled BLDC Drive for Electric VehiclesAvinash Babu KmNo ratings yet
- A209 PDFDocument8 pagesA209 PDFCuriosityShopNo ratings yet
- Electric Vehicle Speed Control Using Three Phase Inverter Operated by DSP-based Space Vector Pulse Width Modulation TechniqueDocument8 pagesElectric Vehicle Speed Control Using Three Phase Inverter Operated by DSP-based Space Vector Pulse Width Modulation TechniqueCuriosityShopNo ratings yet
- Ijaiem 2013 08 25 054Document11 pagesIjaiem 2013 08 25 054International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Performance Analysis of Direct Torque Control of 3-Phase Induction MotorDocument6 pagesPerformance Analysis of Direct Torque Control of 3-Phase Induction MotormaheswaranNo ratings yet
- 4drives Lehtla PDFDocument21 pages4drives Lehtla PDFdennypolariszNo ratings yet
- Thesis On Direct Torque Control of Induction MotorDocument8 pagesThesis On Direct Torque Control of Induction Motorjillbellmilwaukee100% (2)
- 24 Sectors DTC Control of IM Drive Using ANFIS Controller For Minimize Torque RippleDocument6 pages24 Sectors DTC Control of IM Drive Using ANFIS Controller For Minimize Torque RipplebenbouhenniNo ratings yet
- A Mixed Signal AsicDocument6 pagesA Mixed Signal AsicbmmostefaNo ratings yet
- Direct Torque Control ExplainedDocument7 pagesDirect Torque Control ExplainedAnjana SudarsananNo ratings yet
- Performance Analysis On Direct Torque Controlled Induction Motor Drive With Varying Hysteresis Controller BandwidthDocument10 pagesPerformance Analysis On Direct Torque Controlled Induction Motor Drive With Varying Hysteresis Controller Bandwidthaswardi8756No ratings yet
- Improve Power Factor Transmission Lines SVCDocument4 pagesImprove Power Factor Transmission Lines SVCscribsunilNo ratings yet
- Self-correction of Commutation Point for High-speed Sensorless BLDC MotorDocument10 pagesSelf-correction of Commutation Point for High-speed Sensorless BLDC MotorKhaleel MohammadNo ratings yet
- Proposal of LocusDocument4 pagesProposal of LocusRam NepaliNo ratings yet
- Field-Programmable Gate Array-Based Field-Oriented Control For Permanent Magnet Synchronous Motor DriveDocument11 pagesField-Programmable Gate Array-Based Field-Oriented Control For Permanent Magnet Synchronous Motor DriveTELKOMNIKANo ratings yet
- Improved DTCDocument5 pagesImproved DTCHarsh AnandNo ratings yet
- DC Motor Speed Control ThesisDocument5 pagesDC Motor Speed Control Thesisafloziubadtypc100% (1)
- Induction Motor.Document6 pagesInduction Motor.Kiran KumarNo ratings yet
- Phase Currents Reconstruction Using A Single Current Sensor of Three-Phase AC Motors Fed by SVM-Controlled Direct Matrix Converters.Document10 pagesPhase Currents Reconstruction Using A Single Current Sensor of Three-Phase AC Motors Fed by SVM-Controlled Direct Matrix Converters.Jonas BorgesNo ratings yet
- Fuzzy Based Reconfigurable Controller For BLDC MotorDocument7 pagesFuzzy Based Reconfigurable Controller For BLDC MotorkandibanNo ratings yet
- FulltextDocument219 pagesFulltextanupsingh chandelNo ratings yet
- Dsp-Controlled Intelligent High-Performance AC Present FutureDocument8 pagesDsp-Controlled Intelligent High-Performance AC Present FuturePraful YadavNo ratings yet
- An Experimental Assessment of Direct Torque Control and Model Predictive Control Methods for Induction Machine DriveDocument6 pagesAn Experimental Assessment of Direct Torque Control and Model Predictive Control Methods for Induction Machine DriveAbo KikiNo ratings yet
- Design and Analysis of Double Tail Comparator Using Adiabatic LogicDocument7 pagesDesign and Analysis of Double Tail Comparator Using Adiabatic LogicIJSTENo ratings yet
- 2Document6 pages2Sairam SaiNo ratings yet
- Engineering Science and Technology, An International JournalDocument14 pagesEngineering Science and Technology, An International JournalMian AsimNo ratings yet
- Paper 21Document7 pagesPaper 21Anu AthiraNo ratings yet
- Implementation of Digital Signal Controller TMS320C28027 Based PWM For A Single Phase Bidirectional High Frequency Link Photovoltaic InverterDocument8 pagesImplementation of Digital Signal Controller TMS320C28027 Based PWM For A Single Phase Bidirectional High Frequency Link Photovoltaic InverterIfan Seven SeasNo ratings yet
- 3 Vol 3Document9 pages3 Vol 3emnt2007100% (2)
- Direct Torque ControlDocument5 pagesDirect Torque Controlvineeth kumarNo ratings yet
- Design and Implementation of IGBT Based Single Phase AC Drive Using PIC 18F452Document4 pagesDesign and Implementation of IGBT Based Single Phase AC Drive Using PIC 18F452lajosmol100% (1)
- Microcontroller Based Variable Frequency Power Inverter: Khaled A. Madi Ali and Mohammad E. Salem AbozaedDocument4 pagesMicrocontroller Based Variable Frequency Power Inverter: Khaled A. Madi Ali and Mohammad E. Salem AbozaedarshadtabassumNo ratings yet
- DSP-Based Experimental Rig With The Doubly-Fed Induction Generator ForDocument12 pagesDSP-Based Experimental Rig With The Doubly-Fed Induction Generator Fordebasis250No ratings yet
- IgbtDocument7 pagesIgbtelvergonzalez1No ratings yet
- Speed control of 3-phase IM using V/Hz for auto appsDocument6 pagesSpeed control of 3-phase IM using V/Hz for auto appsPrabhat KarnNo ratings yet
- Matrix AdvantagesDocument14 pagesMatrix AdvantagesAdeline WinsterNo ratings yet
- Simplified Sensorless Control For BLDC MDocument12 pagesSimplified Sensorless Control For BLDC MAlg DimasNo ratings yet
- Sensorless Speed Controlled Brushless DC Drive Using The TMS320C242 DSP ControllerDocument17 pagesSensorless Speed Controlled Brushless DC Drive Using The TMS320C242 DSP ControllerVladv123No ratings yet
- Ferroelectricity: Spontaneous Dipole MomentDocument24 pagesFerroelectricity: Spontaneous Dipole Momentaliazab100% (2)
- Text Chapter 11 AIM 1-1-9Document68 pagesText Chapter 11 AIM 1-1-9Luis PinedaNo ratings yet
- Weekly Assessment QuestionDocument3 pagesWeekly Assessment QuestionMohammed SaqibNo ratings yet
- E560 Ae23 DSDocument4 pagesE560 Ae23 DSIrfan ÇizmecioğluNo ratings yet
- EM10000 Product Features and SpecificationsDocument1 pageEM10000 Product Features and SpecificationsM Shoaib AnwarNo ratings yet
- CASE: Electronic Timing, IncDocument4 pagesCASE: Electronic Timing, Inclee_syah50% (2)
- Dillenger C965 Display Manual 2015Document12 pagesDillenger C965 Display Manual 2015FR3DNo ratings yet
- Components in IoT System Design: Sensors, Actuators, Embedded Devices & PlatformsDocument37 pagesComponents in IoT System Design: Sensors, Actuators, Embedded Devices & PlatformsQosai ZoubiNo ratings yet
- ADS1240EDocument23 pagesADS1240Ed.c.delatorre2200No ratings yet
- BJB3C 3fi Motor-DriveDocument5 pagesBJB3C 3fi Motor-Drivethorsharp67% (6)
- 3AXD50000019946 MotiFlexe180 User Manual RevD enDocument236 pages3AXD50000019946 MotiFlexe180 User Manual RevD enNguyen Phuong BacNo ratings yet
- Comparison Between SiC - and Si-Based Inverters ForDocument11 pagesComparison Between SiC - and Si-Based Inverters Forvenktesh22No ratings yet
- B Tech ECE COURSE STRCUTURE AND SYLLABUS FROM 2021 BATCH ONWARDS Modified 2 Mar 2022 PDFDocument301 pagesB Tech ECE COURSE STRCUTURE AND SYLLABUS FROM 2021 BATCH ONWARDS Modified 2 Mar 2022 PDFNISHCHEY RASTOGINo ratings yet
- UG CxxAcc Smart LiIon Power en Rev01 ScreenDocument24 pagesUG CxxAcc Smart LiIon Power en Rev01 ScreenAntonio Augusto Silva AlvesNo ratings yet
- List of IEC Standards - WikipediaDocument26 pagesList of IEC Standards - WikipediaEngr saqibNo ratings yet
- User Manual: Mma 315G/400G Welding MachineDocument28 pagesUser Manual: Mma 315G/400G Welding MachineJOHN BRICCO A. MATACSILNo ratings yet
- DSP-5-Unit-Multirate SP NotesDocument15 pagesDSP-5-Unit-Multirate SP NotesR MuruganNo ratings yet
- User Manual for APA600/1000/1400 Power AmplifiersDocument38 pagesUser Manual for APA600/1000/1400 Power AmplifiersAlex SantiagoNo ratings yet
- EE6508 - Power System Harmonics (Weeks 1 - 6, 2019-2020 Sem 2)Document103 pagesEE6508 - Power System Harmonics (Weeks 1 - 6, 2019-2020 Sem 2)wing fatt hiewNo ratings yet
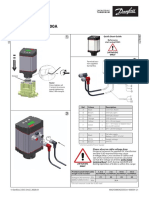
- AN213086423355en-000501 - Quick Setup Startt Guide IcadDocument2 pagesAN213086423355en-000501 - Quick Setup Startt Guide IcadEdmarNo ratings yet
- Service Manual: Mixing ConsoleDocument89 pagesService Manual: Mixing ConsoleleeNo ratings yet
- Electrical Performance: 2.1 Thermodynamics Inside A BatteryDocument26 pagesElectrical Performance: 2.1 Thermodynamics Inside A BatteryTarek HmroucheNo ratings yet
- 6 Analog Signal ConditioningDocument46 pages6 Analog Signal ConditioningheroNo ratings yet
- Panel MeterDocument2 pagesPanel MeterTariq MahmoodNo ratings yet
- Data Loggers ReportDocument22 pagesData Loggers ReportDivya HaldoddiNo ratings yet
- THERMOVAC Transmitter: TTR 101 N, TTR 101 N S Operating Manual 300544655 - 002 - C1Document42 pagesTHERMOVAC Transmitter: TTR 101 N, TTR 101 N S Operating Manual 300544655 - 002 - C1Rodolfo M. PortoNo ratings yet
- Experiment 7 Capacitors: PurposeDocument7 pagesExperiment 7 Capacitors: Purposeعباس حمودNo ratings yet
- Echotrac Mkiii: Operator'S ManualDocument48 pagesEchotrac Mkiii: Operator'S ManualKhắc PhongNo ratings yet
- AC PowerDocument9 pagesAC PowersopheakNo ratings yet
- Q1 Module 4 - V2Document21 pagesQ1 Module 4 - V2edsonNo ratings yet