You might also like
- TLC4501 OpampDocument38 pagesTLC4501 OpampCartoon KidsNo ratings yet
- 28V-Input-Voltage Single-Cell Li-Ion Battery Charger With 10ma RegulatorDocument24 pages28V-Input-Voltage Single-Cell Li-Ion Battery Charger With 10ma RegulatorAlejandro DemitiNo ratings yet
- NDC96 NDC 96 24-75VDC 1.9-6.0a Stepping Motor Drive Boxed Rta Pavia ManualDocument9 pagesNDC96 NDC 96 24-75VDC 1.9-6.0a Stepping Motor Drive Boxed Rta Pavia Manualrenato vitaliNo ratings yet
- Torch Heigh Control PDFDocument10 pagesTorch Heigh Control PDFfationllullaNo ratings yet
- Mitsubishi Motors: Service ManualDocument22 pagesMitsubishi Motors: Service ManualALEJANDRONo ratings yet
- 2.2.1 Power Coro Wiring Description: Garrett PD 65001 User ManualDocument7 pages2.2.1 Power Coro Wiring Description: Garrett PD 65001 User ManualFelipe MejiasNo ratings yet
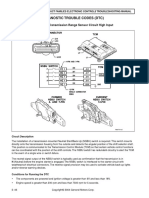
- Diagnostic Trouble Codes (DTC) : DTC P0708 Transmission Range Sensor Circuit High InputDocument4 pagesDiagnostic Trouble Codes (DTC) : DTC P0708 Transmission Range Sensor Circuit High Inputluis eduardo corzo enriquezNo ratings yet
- Gyro & LOG To NMEA Converter: Model SR01-40Document3 pagesGyro & LOG To NMEA Converter: Model SR01-40sajujohnyNo ratings yet
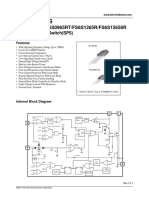
- Fs6S-Series: FS6S0965R/FS6S0965RT/FS6S1265R/FS6S15658RDocument16 pagesFs6S-Series: FS6S0965R/FS6S0965RT/FS6S1265R/FS6S15658RSantz TechNo ratings yet
- Service Manual: FR Series Power AmplifierDocument32 pagesService Manual: FR Series Power AmplifierLuis Daniel Gutierrez PertuzNo ratings yet
- T-49C-CA MOD2 Operational ManualDocument52 pagesT-49C-CA MOD2 Operational ManualVolodymyr PotapovNo ratings yet
- BA ECSxA Axis Module Application (V8.x) v2-0 enDocument451 pagesBA ECSxA Axis Module Application (V8.x) v2-0 enValdir DerlannNo ratings yet
- Step-Up DC-DC MAX8752Document13 pagesStep-Up DC-DC MAX8752Peter PicalNo ratings yet
- Instruction ManualDocument15 pagesInstruction ManualAlbert LaraNo ratings yet
- Forklift SB 04-2008 RevAADocument8 pagesForklift SB 04-2008 RevAAMHS teamNo ratings yet
- Datasheet PKDO1FPDocument18 pagesDatasheet PKDO1FPIvanBernalNo ratings yet
- Tea 2261Document11 pagesTea 2261chorva2011No ratings yet
- Tps 565242Document31 pagesTps 565242AdarshNo ratings yet
- Ge - Zip 60 D Ae-EnDocument1 pageGe - Zip 60 D Ae-EnCallany AnycallNo ratings yet
- Introduction To Control Systems: We Can Consider The Following Circuit at Different LevelsDocument19 pagesIntroduction To Control Systems: We Can Consider The Following Circuit at Different LevelsPeter ParkerNo ratings yet
- Lab #6 - Closed Loop Position ControlDocument4 pagesLab #6 - Closed Loop Position ControlChristy CheriyanNo ratings yet
- TRANS-MidiAMF ENG SHORT V02 PDFDocument26 pagesTRANS-MidiAMF ENG SHORT V02 PDFMarco Pilaguano LogañaNo ratings yet
- Satya Catalog 2023Document52 pagesSatya Catalog 2023Tashmeet SinghNo ratings yet
- TDPD 1 SMDocument111 pagesTDPD 1 SMAswien DharmawanNo ratings yet
- Ucc 39002Document27 pagesUcc 39002dhananjay.pNo ratings yet
- R65C51 Asynchronous Communications: PrelimlnaryDocument19 pagesR65C51 Asynchronous Communications: PrelimlnaryC S KumarNo ratings yet
- AMPLIFICADOR OPERACIONAL Ua741Document5 pagesAMPLIFICADOR OPERACIONAL Ua741lgotthelfNo ratings yet
- Part 2Document46 pagesPart 2dmitry esaulkovNo ratings yet
- SD6701 AC Buck Led DriverDocument8 pagesSD6701 AC Buck Led DriverCarlos ChuekeNo ratings yet
- FAN 7311 - FairchildDocument13 pagesFAN 7311 - FairchildStevenNo ratings yet
- Manuale Sanyo Denky en PDFDocument58 pagesManuale Sanyo Denky en PDFTrung Truc NguyenNo ratings yet
- Mach3 Breakout Board W/ Relay & PWM: USB 5v (IN)Document12 pagesMach3 Breakout Board W/ Relay & PWM: USB 5v (IN)abrahamNo ratings yet
- Ashida RelaysDocument4 pagesAshida RelaysishwarNo ratings yet
- Ge - Zip 120 D Ae 3F: Generating Set DieselDocument1 pageGe - Zip 120 D Ae 3F: Generating Set DieselCallany AnycallNo ratings yet
- Ppi Controler 90.1055 Blms As BuiltDocument25 pagesPpi Controler 90.1055 Blms As BuiltramprakashpatelNo ratings yet
- CMOS General Purpose Timer: Description Pin ConfigurationDocument10 pagesCMOS General Purpose Timer: Description Pin ConfigurationNagappan NagaNo ratings yet
- Compal La-9902p r1.0 Schematics PDFDocument53 pagesCompal La-9902p r1.0 Schematics PDFhiteshNo ratings yet
- Multipurpose Timer 6062Document2 pagesMultipurpose Timer 6062All it's FineNo ratings yet
- Peaktronics: Digital High-Resolution ControllerDocument12 pagesPeaktronics: Digital High-Resolution Controllerschmal1975No ratings yet
- DCDC PTN78060WDocument26 pagesDCDC PTN78060WJoão Oliveira BentesNo ratings yet
- Tps 54160Document50 pagesTps 54160csclzNo ratings yet
- 8A2512 PericomDocument4 pages8A2512 PericomandrasorNo ratings yet
- Tap Position Indicator Tc-02: FeaturesDocument1 pageTap Position Indicator Tc-02: Featuresss subramanyamNo ratings yet
- TPS54531 5-A, 28-V Input, Step-Down SWIFT™ DC-DC Converter With Eco-Mode™Document33 pagesTPS54531 5-A, 28-V Input, Step-Down SWIFT™ DC-DC Converter With Eco-Mode™hajaNo ratings yet
- WT Micro Temperature Controller CatalogueDocument7 pagesWT Micro Temperature Controller CataloguepngchanhNo ratings yet
- Jiuzhou dtt1609 Service Manual PDFDocument44 pagesJiuzhou dtt1609 Service Manual PDFVishu JoshiNo ratings yet
- bq40z50-R1 1-Series, 2-Series, 3-Series, and 4-Series Li-Ion Battery Pack ManagerDocument56 pagesbq40z50-R1 1-Series, 2-Series, 3-Series, and 4-Series Li-Ion Battery Pack ManagerAlexNo ratings yet
- EPERIMENT: Study of Simulation Software Using Simple CircuitsDocument20 pagesEPERIMENT: Study of Simulation Software Using Simple CircuitsShanmukh ShannuNo ratings yet
- DS SG1846 Rev-1.2Document17 pagesDS SG1846 Rev-1.2Yuni MamaNo ratings yet
- THAT 2181-Series DatasheetDocument12 pagesTHAT 2181-Series Datasheetjiren the winerNo ratings yet
- CN0155Document4 pagesCN0155Industrias TecnológicasNo ratings yet
- 9IS54376-1 EWRC 300 500 NT QuickStart EN 11141006231377Document14 pages9IS54376-1 EWRC 300 500 NT QuickStart EN 11141006231377Νικόλας ΧιονάςNo ratings yet
- PWM Top221-227Document21 pagesPWM Top221-227gilsonNo ratings yet
- ICEQS01Document21 pagesICEQS01Anildo MartinsNo ratings yet
- Texas Instruments Pth12060waz DC DC Power Supply Through HoleDocument29 pagesTexas Instruments Pth12060waz DC DC Power Supply Through Holeednardo CunhaNo ratings yet
- Cts 9006Document20 pagesCts 9006Francis MuyumbaNo ratings yet
- SIUI Cts-9006-Cts-9009-Operation-Manual-V14-Release PDFDocument93 pagesSIUI Cts-9006-Cts-9009-Operation-Manual-V14-Release PDFVasko Mandil50% (2)
- Cts 9006 Cts 9009 Operation Manual v14 Release - Compress 1Document93 pagesCts 9006 Cts 9009 Operation Manual v14 Release - Compress 1Dimitris KafesNo ratings yet
- FGD PresentationDocument32 pagesFGD PresentationSaravanan RagupathyNo ratings yet
- Guias de Inspeccion Cheyenne IIDocument23 pagesGuias de Inspeccion Cheyenne IIesedgar100% (1)
- Bergson and The Metaphysics of Media PDFDocument197 pagesBergson and The Metaphysics of Media PDFDrMlad100% (2)
- Line Following Robot in VerilogDocument12 pagesLine Following Robot in VerilogAparna GopalNo ratings yet
- LogDocument1,025 pagesLogAkmal Al AzamNo ratings yet
- Mitac 8615 - Rev r01Document29 pagesMitac 8615 - Rev r01zokiNo ratings yet
- Quarter3 Week8 ConstellationDocument10 pagesQuarter3 Week8 ConstellationLaika Monick Pablico TacardonNo ratings yet
- Space Robotics: PreviewDocument21 pagesSpace Robotics: PreviewAnvit TiwariNo ratings yet
- English Top Notch 1Document12 pagesEnglish Top Notch 1MATE JOSNo ratings yet
- Sony Ericsson K700i Part List - Mechanical RevHDocument7 pagesSony Ericsson K700i Part List - Mechanical RevHAdyBorsosNo ratings yet
- Cryptool Lab f05Document6 pagesCryptool Lab f05Vanesa Daza50% (2)
- Ba40-Ba80-Ba160 Anten RFI OmniDocument1 pageBa40-Ba80-Ba160 Anten RFI OmniBao Quoc MaiNo ratings yet
- Determination of Moisture Content (ASTM D2216) : ProcedureDocument20 pagesDetermination of Moisture Content (ASTM D2216) : ProcedureJr SayreNo ratings yet
- Wiring and Setting Up An Iqpump1000 Duplex System Transducer WiringDocument5 pagesWiring and Setting Up An Iqpump1000 Duplex System Transducer WiringdiegoNo ratings yet
- Factors Affecting Job Performance of Criminology Working StudentDocument10 pagesFactors Affecting Job Performance of Criminology Working StudentJAIKO JOSE LAGANo ratings yet
- The Martian ChroniclesDocument23 pagesThe Martian ChroniclesIlana GuttmanNo ratings yet
- MECH 313 Engineering Drawing & Design: Lectures 12 and 13Document66 pagesMECH 313 Engineering Drawing & Design: Lectures 12 and 13RUBY_05No ratings yet
- Snarling Dogs Blues Bawls WahDocument2 pagesSnarling Dogs Blues Bawls WahMy HaHNo ratings yet
- Architecturally Exposed Structural Steel 05125 - : /conversion/tmp/scratch/397613755Document12 pagesArchitecturally Exposed Structural Steel 05125 - : /conversion/tmp/scratch/397613755LH BarriosNo ratings yet
- UltraView EVP Storage Calculator 4.2Document6 pagesUltraView EVP Storage Calculator 4.2Wissam JarmakNo ratings yet
- HRACM Assignment III - Infosys Case StudyDocument4 pagesHRACM Assignment III - Infosys Case Studysupriya sonkusareNo ratings yet
- Kluber PresentationDocument79 pagesKluber PresentationZegera MgendiNo ratings yet
- 5 Reception and Hospitality: The Importance of ReceptionDocument12 pages5 Reception and Hospitality: The Importance of ReceptionBryan JamaludeenNo ratings yet
- Lesson Planning Quadratic & LinearDocument1 pageLesson Planning Quadratic & LinearJonathan RobinsonNo ratings yet
- Siprotec 4 Und Siprotec Compact: Service Information FirmwareupdateDocument45 pagesSiprotec 4 Und Siprotec Compact: Service Information FirmwareupdateAbhishek RajputNo ratings yet
- Doll's House As A Feminist PlayDocument6 pagesDoll's House As A Feminist PlayAyesha ButtNo ratings yet
- Cognitive Radio Cognitive Network SimulatorDocument60 pagesCognitive Radio Cognitive Network SimulatorChandra Mohanty0% (1)
- Rexroth Indradrive Drive Controllers Power Sections Hcs04: Instruction ManualDocument76 pagesRexroth Indradrive Drive Controllers Power Sections Hcs04: Instruction Manualeduardoduboc100% (1)
- Space TelescopesDocument141 pagesSpace TelescopesPat StakemNo ratings yet
- Global Commands: Company of Heroes Install CodeDocument20 pagesGlobal Commands: Company of Heroes Install CodeObed RegaladoNo ratings yet