You might also like
- 011177073Document7 pages011177073Adrian Cocis100% (1)
- Comapnies List - V1 5.10.2009 DeeDocument42 pagesComapnies List - V1 5.10.2009 Deeiluvu_r100% (1)
- Absorption Spectrum of A Conjugated DyeDocument6 pagesAbsorption Spectrum of A Conjugated DyeKing Everest100% (1)
- Steyr Kompakt 4075 - 4085 - 4095 - 4105 - 4115 Ecotech - Tractor Service Manual 47803877Document9 pagesSteyr Kompakt 4075 - 4085 - 4095 - 4105 - 4115 Ecotech - Tractor Service Manual 47803877alexandrabrown110690ctg100% (124)
- Flow CytometryDocument6 pagesFlow CytometryOCCULTEDNo ratings yet
- Fluorescence Microscopy: Super-Resolution and other Novel TechniquesFrom EverandFluorescence Microscopy: Super-Resolution and other Novel TechniquesAnda CorneaNo ratings yet
- Sensors For Everyday LifeDocument294 pagesSensors For Everyday LifeIhza Maessa CahyadiNo ratings yet
- Contactless Vital Signs MonitoringFrom EverandContactless Vital Signs MonitoringWenjin WangNo ratings yet
- Tabla Tension Correas GatesDocument4 pagesTabla Tension Correas Gatesvibrador0% (1)
- Comprehensive and Comparative Study of Drowning Person Detection and Rescue SystemsDocument6 pagesComprehensive and Comparative Study of Drowning Person Detection and Rescue Systemsputra mulia rizky selianNo ratings yet
- Design of Pulse Oximetry System: Journal of Basic and Applied Research International April 2015Document12 pagesDesign of Pulse Oximetry System: Journal of Basic and Applied Research International April 2015Martha H.TNo ratings yet
- BiosensoresDocument6 pagesBiosensoresluiscalvo5No ratings yet
- Fall Detection System For Elderly Person Using Embedded SystemDocument5 pagesFall Detection System For Elderly Person Using Embedded SystemRamesh BabuNo ratings yet
- 3.3 Physiological Monitoring and Measurements: Chapter 3 Sensors As Part of Personal Protective EquipmentDocument10 pages3.3 Physiological Monitoring and Measurements: Chapter 3 Sensors As Part of Personal Protective Equipmentpvsreddy2002No ratings yet
- DDMHSA Dual Deterministic ModelBased Heart Sound Analysis For Daily Life MonitoringSensorsDocument17 pagesDDMHSA Dual Deterministic ModelBased Heart Sound Analysis For Daily Life MonitoringSensorsfrancogarciaramirez1No ratings yet
- 9B Documentation (MAJOR)Document55 pages9B Documentation (MAJOR)dulipala alekya gupthaNo ratings yet
- Flow CytometryDocument13 pagesFlow CytometryNTA UGC-NETNo ratings yet
- Ijett V4i5p21Document6 pagesIjett V4i5p21Sowmya PNo ratings yet
- 10 1109iscaie 2018 8405441Document7 pages10 1109iscaie 2018 8405441Enas HowidyNo ratings yet
- Deriving Heart Rate and Respiratory Rate From Pulse Oximetry DataDocument7 pagesDeriving Heart Rate and Respiratory Rate From Pulse Oximetry DataVelumani sNo ratings yet
- A Wearable System For Tremor Monitoring and AnalysisDocument9 pagesA Wearable System For Tremor Monitoring and AnalysisZoran ConstantinescuNo ratings yet
- ECE Medical Mirror ReportDocument30 pagesECE Medical Mirror ReportgreeshmeshNo ratings yet
- Diana Lucia-2016-NONINVANSIVE MONITORING SYSTEM FOR EARLY DETECTION OF APNEADocument5 pagesDiana Lucia-2016-NONINVANSIVE MONITORING SYSTEM FOR EARLY DETECTION OF APNEAArda Safira Kardono D4AJNo ratings yet
- ECE Medical Mirror ReportDocument30 pagesECE Medical Mirror Reportinnovative thinkerNo ratings yet
- Sensors 22 03859Document15 pagesSensors 22 0385954m8mj5qn9No ratings yet
- 2009-01-Personalized Feedback Based On Automatic Activity Recognition From Mixed-Source Raw Sensor DataDocument2 pages2009-01-Personalized Feedback Based On Automatic Activity Recognition From Mixed-Source Raw Sensor DataHarm op den AkkerNo ratings yet
- Sewage Environment and Workers Health Monitoring System Using IOT and MLDocument9 pagesSewage Environment and Workers Health Monitoring System Using IOT and MLIJRASETPublicationsNo ratings yet
- Development of A Smart Garment For The Assessment of Cardiac Mechanical Performance and Other Vital Signs During Sleep in MicrogravityDocument9 pagesDevelopment of A Smart Garment For The Assessment of Cardiac Mechanical Performance and Other Vital Signs During Sleep in MicrogravitynarykNo ratings yet
- Chapter One 1.0Document32 pagesChapter One 1.0Victor ImehNo ratings yet
- Palm VeinDocument1 pagePalm VeinhanimehekNo ratings yet
- FACSDocument8 pagesFACSKarthick ThiyagarajanNo ratings yet
- Letter: Fully Integrated Wearable Sensor Arrays For Multiplexed in Situ Perspiration AnalysisDocument18 pagesLetter: Fully Integrated Wearable Sensor Arrays For Multiplexed in Situ Perspiration AnalysisWala SaadehNo ratings yet
- A Soft, Wearable Microfluidic Device For The Capture, Storage, and Colorimetric Sensing of SweatDocument14 pagesA Soft, Wearable Microfluidic Device For The Capture, Storage, and Colorimetric Sensing of SweatWala SaadehNo ratings yet
- Development of A System For Monitoring The Functional Parameters of The Heart Using A SmartphoneDocument5 pagesDevelopment of A System For Monitoring The Functional Parameters of The Heart Using A SmartphoneOpen Access JournalNo ratings yet
- Sensors: Passively Addressable Ultra-Low Volume Sweat Chloride SensorDocument14 pagesSensors: Passively Addressable Ultra-Low Volume Sweat Chloride SensorpriyaNo ratings yet
- Development of Earthquake Early Warning System Using ADXL335 AccelerometerDocument6 pagesDevelopment of Earthquake Early Warning System Using ADXL335 Accelerometerebank ekalayaNo ratings yet
- Arm and Wrist Surface Potential Mapping For Wearable ECG Rhythm Recording Devices A PilotDocument9 pagesArm and Wrist Surface Potential Mapping For Wearable ECG Rhythm Recording Devices A PilotKarthik Raj VNo ratings yet
- Fall DetectionDocument9 pagesFall DetectionGuru VelmathiNo ratings yet
- Wearable Sensors For Reliable Fall DetectionDocument4 pagesWearable Sensors For Reliable Fall DetectionshivnairNo ratings yet
- Anti Drowing SystemDocument88 pagesAnti Drowing SystemMaximilian Sylvester100% (2)
- Heart Rate Detection From Impedance PlethysmographDocument7 pagesHeart Rate Detection From Impedance PlethysmographIsabel A. Morales L.No ratings yet
- Biosensors Electrochemical Tattoo For Real-Time Noninvasive LactateDocument27 pagesBiosensors Electrochemical Tattoo For Real-Time Noninvasive LactatetusharNo ratings yet
- Reading01 PDFDocument3 pagesReading01 PDFbmr_guruNo ratings yet
- FAll and Non FallDocument7 pagesFAll and Non Fallsontruonghuu3kNo ratings yet
- Wie Claw 2017Document5 pagesWie Claw 2017EdisonNo ratings yet
- A Hidden Markov Model of The Breaststroke Swimming Temporal Phases Using Wearable Inertial Measurement UnitsDocument7 pagesA Hidden Markov Model of The Breaststroke Swimming Temporal Phases Using Wearable Inertial Measurement Unitspdm5642No ratings yet
- Sensordevices 2017 9 10 20010Document3 pagesSensordevices 2017 9 10 20010EliasA.TiongkiaoNo ratings yet
- Tissue Window Chamber System For Validation of Implanted Oxygen SensorsDocument7 pagesTissue Window Chamber System For Validation of Implanted Oxygen SensorsSevim KöseNo ratings yet
- Blood Leakage Detection System Durin HemodialysisDocument12 pagesBlood Leakage Detection System Durin Hemodialysiscain.pewNo ratings yet
- Design and Characterization of An Osmotic Sensor For The Detection of Events Associated With Dehydration and OverhydrationDocument9 pagesDesign and Characterization of An Osmotic Sensor For The Detection of Events Associated With Dehydration and OverhydrationJhoselinAnaveZentenoNo ratings yet
- A Wireless ECG Smart Sensor For Broad Application in Life Threatening Event DetectionDocument4 pagesA Wireless ECG Smart Sensor For Broad Application in Life Threatening Event DetectionDipin MutrejaNo ratings yet
- 1847-Article Text-5175-1-10-20221003Document6 pages1847-Article Text-5175-1-10-20221003Muhammad ihsanNo ratings yet
- Portable Real Time ECG Monitor and Disease DiagnosDocument6 pagesPortable Real Time ECG Monitor and Disease DiagnosFahim87No ratings yet
- Flow CytometryDocument7 pagesFlow CytometryAbhishek KumarNo ratings yet
- Drowning Detection System: Enhancing Safety Through Visual IntelligenceFrom EverandDrowning Detection System: Enhancing Safety Through Visual IntelligenceNo ratings yet
- A Threshold-Based Fall-Detection Algorithm Using A Bi-Axial Gyroscope SensorDocument7 pagesA Threshold-Based Fall-Detection Algorithm Using A Bi-Axial Gyroscope SensorHieuNo ratings yet
- Multi-Parameter Health Monitoring SystemDocument9 pagesMulti-Parameter Health Monitoring SystemIJRASETPublicationsNo ratings yet
- Sensors-13-14466 (Published Article)Document18 pagesSensors-13-14466 (Published Article)Erna TamiziNo ratings yet
- Kirti Gupta-Wearable BiosensorDocument29 pagesKirti Gupta-Wearable BiosensorKirti GuptaNo ratings yet
- Deadtime Amb DesintegracióDocument11 pagesDeadtime Amb DesintegracióVictor Sender RodríguezNo ratings yet
- Pilani, K. K. Birla Goa Campus: Birla Institute of Technology & ScienceDocument8 pagesPilani, K. K. Birla Goa Campus: Birla Institute of Technology & Sciencedivyarai12345No ratings yet
- Eddy Current Based Flexible Sensor For Contactless Measurement of BreathingDocument4 pagesEddy Current Based Flexible Sensor For Contactless Measurement of BreathingA047 prince KumarNo ratings yet
- Design and Development of Patient Monitoring SysteDocument7 pagesDesign and Development of Patient Monitoring SysteMuhammad MustakimNo ratings yet
- Tee Slide 2Document10 pagesTee Slide 2OpeyemiNo ratings yet
- 4314ijist03 PDFDocument6 pages4314ijist03 PDFmanxomattNo ratings yet
- Vent Accessories Brochure PN 335Document7 pagesVent Accessories Brochure PN 335tonyNo ratings yet
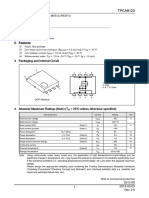
- TPCA8123 Datasheet en 20140303Document9 pagesTPCA8123 Datasheet en 20140303tonyNo ratings yet
- LTV 1150 TrainingDocument341 pagesLTV 1150 TrainingtonyNo ratings yet
- RC AVEA-Volumetric-Capnography BR ENDocument2 pagesRC AVEA-Volumetric-Capnography BR ENtonyNo ratings yet
- Servo - Cookbook - MbedDocument6 pagesServo - Cookbook - MbedCảnh ManuNo ratings yet
- Stormbrixx - Fisa TehnicaDocument108 pagesStormbrixx - Fisa Tehnicamureseanu_deliaNo ratings yet
- Afdis Fiscal Tax Invoice#1735-1-20230207-121559Document1 pageAfdis Fiscal Tax Invoice#1735-1-20230207-121559tanaka gwitiraNo ratings yet
- Voltmeter and Ammeter Using PIC Microcontroller PDFDocument11 pagesVoltmeter and Ammeter Using PIC Microcontroller PDFMohd Waseem Ansari100% (1)
- Diversification in Flavoured Milk: A ReviewDocument6 pagesDiversification in Flavoured Milk: A ReviewInternational Journal of Clinical and Biomedical Research (IJCBR)No ratings yet
- Cricbuzz - Google SearchDocument1 pageCricbuzz - Google SearchFranklin OmejeNo ratings yet
- Gamification Toward A Definition PDFDocument4 pagesGamification Toward A Definition PDFFrancis Joe RodriguezNo ratings yet
- Microwaves Heat The Soil To Eliminate Pests and Help Farmers Manage Soil DiseasesDocument3 pagesMicrowaves Heat The Soil To Eliminate Pests and Help Farmers Manage Soil Diseasesalmira villarealNo ratings yet
- Capability Statement 1Document1 pageCapability Statement 1api-523267488No ratings yet
- Tutorial 17: Getting Started With ModelicaDocument9 pagesTutorial 17: Getting Started With ModelicaMuamera HodzicNo ratings yet
- ZumbroShopper15 10 07Document12 pagesZumbroShopper15 10 07Kristina HicksNo ratings yet
- Undergraduate Research ProjectDocument47 pagesUndergraduate Research ProjectToyin Michael Onagoruwa XviNo ratings yet
- 10 Smart Tips To Confidently Answer J-1 Visa Interview Questions - Global Internships 4Document1 page10 Smart Tips To Confidently Answer J-1 Visa Interview Questions - Global Internships 4Mariana San MartinNo ratings yet
- Dissertation Examples University of GlasgowDocument7 pagesDissertation Examples University of GlasgowBuyPsychologyPapersRanchoCucamonga100% (1)
- ME ProgramDocument21 pagesME Programadyro12No ratings yet
- Shankar Ias Revision QuestionsDocument23 pagesShankar Ias Revision QuestionskankirajeshNo ratings yet
- The Verb To Be ExplanationsDocument5 pagesThe Verb To Be ExplanationsLuz Maria Batista MendozaNo ratings yet
- The Writing Process (Pre-Writing Strategies) - (Literacy Strategy Guide)Document8 pagesThe Writing Process (Pre-Writing Strategies) - (Literacy Strategy Guide)Princejoy ManzanoNo ratings yet
- Scheme - I Sample Question Paper: Program Name: Diploma in Plastic EngineeringDocument4 pagesScheme - I Sample Question Paper: Program Name: Diploma in Plastic EngineeringAmit GhadeNo ratings yet
- Credit Transactions: San Beda College of LawDocument35 pagesCredit Transactions: San Beda College of LawGela Bea BarriosNo ratings yet
- Task 1 Identify Typical Sources of Harmonics in A Power SystemDocument12 pagesTask 1 Identify Typical Sources of Harmonics in A Power SystemSean Galvin100% (1)
- Managing The Finance FunctionDocument12 pagesManaging The Finance FunctionDumplings DumborNo ratings yet
- Miramer M210 TDS - Rev1.0Document1 pageMiramer M210 TDS - Rev1.0Adesh GurjarNo ratings yet
- Arkansas Department of Human Services: Application For An Independently Licensed PractitonerDocument2 pagesArkansas Department of Human Services: Application For An Independently Licensed PractitonerHarold LowryNo ratings yet
- Version For Internet Nutrition Spreadsheet (With Workout Tracker)Document10 pagesVersion For Internet Nutrition Spreadsheet (With Workout Tracker)GeraldyneNo ratings yet