You might also like
- Stochastic Methods for Flow in Porous Media: Coping with UncertaintiesFrom EverandStochastic Methods for Flow in Porous Media: Coping with UncertaintiesNo ratings yet
- Spatial Probabilistic Multi Criteria DecDocument46 pagesSpatial Probabilistic Multi Criteria Decathot789No ratings yet
- A New Tool For Automatic Calibration of Storm Water Management ModelDocument9 pagesA New Tool For Automatic Calibration of Storm Water Management Model吳彥摩 WU,YEN-MO N86114059No ratings yet
- Water 13 00028 v3Document23 pagesWater 13 00028 v3enyNo ratings yet
- Bhola Conf GA MTDocument12 pagesBhola Conf GA MTSyed Khateeb AhmadNo ratings yet
- 02 Intro Calibrtn N ErrorDocument15 pages02 Intro Calibrtn N ErrormkmanojdevilNo ratings yet
- Invited Paper: A A B ADocument12 pagesInvited Paper: A A B AherlinafitrianingsihNo ratings yet
- WIREs Water - 2021 - Herrera - Parameter Estimation and Uncertainty Analysis in Hydrological ModelingDocument23 pagesWIREs Water - 2021 - Herrera - Parameter Estimation and Uncertainty Analysis in Hydrological Modelingmanin1No ratings yet
- 1 s2.0 S0309170806000455 MainDocument21 pages1 s2.0 S0309170806000455 MainAkuNo ratings yet
- State Updating and Calibration Period Selection To Improve Dynamic Monthly Streamflow Forecasts For An Environmental Flow Management ApplicationDocument17 pagesState Updating and Calibration Period Selection To Improve Dynamic Monthly Streamflow Forecasts For An Environmental Flow Management ApplicationDavid JimenezNo ratings yet
- Journal of Hydrology: Nibret A. Abebe, Fred L. Ogden, Nawa R. PradhanDocument10 pagesJournal of Hydrology: Nibret A. Abebe, Fred L. Ogden, Nawa R. PradhanSole Cabrera AnahuaNo ratings yet
- Accepted Manuscript: Advances in Water ResourcesDocument38 pagesAccepted Manuscript: Advances in Water ResourcesGioovanni AlejandroNo ratings yet
- JWC 2023272Document24 pagesJWC 2023272Hussein BizimanaNo ratings yet
- 1 s2.0 S1364815221002772 MainDocument14 pages1 s2.0 S1364815221002772 MainSecretSanta HYDR 2021No ratings yet
- An Overview of Some Hydrological Models in Water Resources Engineering Systems U. A. Ibrahim and S. Dan'azumiDocument8 pagesAn Overview of Some Hydrological Models in Water Resources Engineering Systems U. A. Ibrahim and S. Dan'azumiMursaleen BawarNo ratings yet
- Statistical Analysis To Identify The Main Parameters ToDocument10 pagesStatistical Analysis To Identify The Main Parameters ToInternational Journal of Research in Engineering and TechnologyNo ratings yet
- HP2003 Wagener Et Al.Document22 pagesHP2003 Wagener Et Al.ranim najibNo ratings yet
- An Unsupervised Approach To Leak deDocument13 pagesAn Unsupervised Approach To Leak deLIZANDRO DE SOUZA OLIVEIRANo ratings yet
- Biondi 2012 Validation of Hydrological Models CDocument7 pagesBiondi 2012 Validation of Hydrological Models CJesús RealesNo ratings yet
- An Unsupervised Approach To Leak Detection and Location in Water Distribution NetworksDocument13 pagesAn Unsupervised Approach To Leak Detection and Location in Water Distribution NetworksNagendra prajapatiNo ratings yet
- Regionalisation of Hydrological Model Parameters Under Parameter Uncertainty: A Case Study Involving TOPMODEL and Basins Across The GlobeDocument19 pagesRegionalisation of Hydrological Model Parameters Under Parameter Uncertainty: A Case Study Involving TOPMODEL and Basins Across The GlobeBernard OwusuNo ratings yet
- Modeling Sediment YieldDocument13 pagesModeling Sediment YieldisholaoladimejiNo ratings yet
- 02 - 2024 - SHIU, Chia-Cheng - CHUNG, Chih-Chung - CHIANG, TzupingDocument19 pages02 - 2024 - SHIU, Chia-Cheng - CHUNG, Chih-Chung - CHIANG, TzupingElton LuanNo ratings yet
- Multiple Imputations by Chained Equations For Recovering Missing Daily StreamfloDocument14 pagesMultiple Imputations by Chained Equations For Recovering Missing Daily StreamfloInés Margarita BravoNo ratings yet
- Beven 2007Document8 pagesBeven 2007Yerel MoralesNo ratings yet
- Coupling The Causal Inference and Informer NetworksDocument23 pagesCoupling The Causal Inference and Informer Networkslzh FangNo ratings yet
- Model and Parameter Uncertainty in IDF Relationships Under Climate ChangeDocument13 pagesModel and Parameter Uncertainty in IDF Relationships Under Climate ChangejonasrichelieuNo ratings yet
- AdeyeriDocument15 pagesAdeyerijme250047No ratings yet
- Assessing The Reliability of Probabilistic Flood Inundation Model Predictions PDFDocument43 pagesAssessing The Reliability of Probabilistic Flood Inundation Model Predictions PDFDora Marcela Benìtez RamirezNo ratings yet
- BATEA TeoríaDocument9 pagesBATEA TeoríaYerel MoralesNo ratings yet
- R - R ModelsDocument24 pagesR - R ModelsBijay Kumar RegmiNo ratings yet
- SWAT Model Calibration EvaluationDocument16 pagesSWAT Model Calibration EvaluationAnonymous BVbpSENo ratings yet
- Artículo 1Document14 pagesArtículo 1Cony Gomez JulioNo ratings yet
- 2022 - Effective Stochastic Streamflow Simulation Method Based On Gaussian Mixture ModelDocument15 pages2022 - Effective Stochastic Streamflow Simulation Method Based On Gaussian Mixture Modelmumtaz aliNo ratings yet
- Quispe ECMOR FinalDocument16 pagesQuispe ECMOR FinalPedroNo ratings yet
- LEAP: Data, Calibration and Validation of Soil Liquefaction ModelsDocument9 pagesLEAP: Data, Calibration and Validation of Soil Liquefaction Modelsshachen2014No ratings yet
- Wu 2021Document16 pagesWu 2021Abinash SahooNo ratings yet
- 1 s2.0 S2214241X15001273 Main PDFDocument7 pages1 s2.0 S2214241X15001273 Main PDFCristóbal Alberto Campos MuñozNo ratings yet
- Calibration and Validation of Water Quality ModelDocument10 pagesCalibration and Validation of Water Quality ModelGita LestariNo ratings yet
- 5-LCC Mineria PDFDocument19 pages5-LCC Mineria PDFCatalina GrimaldosNo ratings yet
- Hydrological Model Optimization Using Multi-Gauge Calib (MGC) in Mountaneous RegionDocument13 pagesHydrological Model Optimization Using Multi-Gauge Calib (MGC) in Mountaneous RegionSead AhmedNo ratings yet
- Jawwafeb09 No101vol2 WoodDocument15 pagesJawwafeb09 No101vol2 WoodlsaishankarNo ratings yet
- Parameterization and Parameter Estimation of Distributed ModelsDocument6 pagesParameterization and Parameter Estimation of Distributed Modelsmat506615No ratings yet
- 11 Chapter2Document17 pages11 Chapter2junNo ratings yet
- Zhao2015 PDFDocument12 pagesZhao2015 PDFHossein NajafiNo ratings yet
- Zhao 2015Document12 pagesZhao 2015Hossein NajafiNo ratings yet
- Multi-Objective Evaluation of Urban Drainage Networks Using A 1D/2D Flood Inundation ModelDocument15 pagesMulti-Objective Evaluation of Urban Drainage Networks Using A 1D/2D Flood Inundation ModelBekar SinghNo ratings yet
- Developing Stage-Discharge Relations Using Optimization TechniquesDocument8 pagesDeveloping Stage-Discharge Relations Using Optimization TechniquesLuay Kadhim Al-WaeliNo ratings yet
- Effect of Parameter Uncertainty On Water Quality Predictions in Distribution Systems-Case StudyDocument21 pagesEffect of Parameter Uncertainty On Water Quality Predictions in Distribution Systems-Case StudyJW MedinaceliNo ratings yet
- Docu 13Document14 pagesDocu 13Franco CernaNo ratings yet
- Water Resources Research - 2014 - Madadgar - Improved Bayesian Multimodeling Integration of Copulas and Bayesian ModelDocument18 pagesWater Resources Research - 2014 - Madadgar - Improved Bayesian Multimodeling Integration of Copulas and Bayesian Modelshaikjabeen784No ratings yet
- SPE 133877 Hydraulic Fracture Monitoring To Reservoir Simulation: Maximizing ValueDocument26 pagesSPE 133877 Hydraulic Fracture Monitoring To Reservoir Simulation: Maximizing ValueTrieu NguyenNo ratings yet
- Tripathi 2006Document20 pagesTripathi 2006Rafi NoorfiandiNo ratings yet
- An Overview of Rainfall-Runoff Model TypesDocument10 pagesAn Overview of Rainfall-Runoff Model TypesDigvijayNo ratings yet
- 1 s2.0 S2214581822003196 MainDocument16 pages1 s2.0 S2214581822003196 MainfatimamolaeeNo ratings yet
- A Novel CFD-DeM Upscaling Method For Prediction of Scour Under Live-Bed ConditionsDocument13 pagesA Novel CFD-DeM Upscaling Method For Prediction of Scour Under Live-Bed ConditionszhoushengtjuNo ratings yet
- Can Machine Learning and Predictor Selection Algorithms Yield Reliable Stream Flow Prediction?Document10 pagesCan Machine Learning and Predictor Selection Algorithms Yield Reliable Stream Flow Prediction?malaya_mohantyNo ratings yet
- Mustafa Et Al. 2020Document17 pagesMustafa Et Al. 2020Miqueias PedroNo ratings yet
- 1 s2.0 0304380094901430 MainDocument20 pages1 s2.0 0304380094901430 Mainmona aminNo ratings yet
- Hess 20 669 2016Document15 pagesHess 20 669 2016kusumastNo ratings yet
- Cement AssignmentDocument2 pagesCement AssignmentHasleen BeniNo ratings yet
- Full Text 01Document137 pagesFull Text 01Hasleen BeniNo ratings yet
- Full Text 01Document137 pagesFull Text 01Hasleen BeniNo ratings yet
- ConcreteDocument3 pagesConcreteHasleen BeniNo ratings yet
- Assignment 1Document1 pageAssignment 1Hasleen BeniNo ratings yet
- Full Text 01Document137 pagesFull Text 01Hasleen BeniNo ratings yet
- 34apparent DensityDocument2 pages34apparent DensityVelmuruganNo ratings yet
- Engageny: Core Knowledge, Grade 1Document9 pagesEngageny: Core Knowledge, Grade 1Hasleen BeniNo ratings yet
- Intro Solid Modeling (3D)Document23 pagesIntro Solid Modeling (3D)Lakshmi PathiNo ratings yet
- 1.d. AutoCAD Lecture 1Document16 pages1.d. AutoCAD Lecture 1idigitiNo ratings yet
- Rain Classroom ManualDocument46 pagesRain Classroom ManualHasleen BeniNo ratings yet
- Ac 2009-2054: A Course On Sustainable Materials Use in Civil Engineering: Syllabus, Delivery, and Student FeedbackDocument17 pagesAc 2009-2054: A Course On Sustainable Materials Use in Civil Engineering: Syllabus, Delivery, and Student FeedbackHasleen BeniNo ratings yet
- AutoCAD Tutorial 002 PDFDocument54 pagesAutoCAD Tutorial 002 PDFskannanmecNo ratings yet
- Jen and Ben Learn About Farms LVL e Passage PDFDocument1 pageJen and Ben Learn About Farms LVL e Passage PDFHasleen BeniNo ratings yet
- Author's Purpose For To Entertain To Inform To Persuade: Class PetsDocument3 pagesAuthor's Purpose For To Entertain To Inform To Persuade: Class PetsHasleen BeniNo ratings yet
- Instructions: Have Students Cut Out The Pictures and Paste Them in The Order in Which They Happened in TheDocument3 pagesInstructions: Have Students Cut Out The Pictures and Paste Them in The Order in Which They Happened in TheHasleen BeniNo ratings yet
- Raz lf48 Atairport WKSHDocument4 pagesRaz lf48 Atairport WKSHHasleen BeniNo ratings yet
- Guiding The Reading Lesson EssentialsDocument3 pagesGuiding The Reading Lesson EssentialsHasleen BeniNo ratings yet
- Guiding The Reading Lesson EssentialsDocument3 pagesGuiding The Reading Lesson EssentialsHasleen BeniNo ratings yet
- Lesson Plan: About The BookDocument6 pagesLesson Plan: About The BookHasleen BeniNo ratings yet
- Many Animal Dads Help Their Babies.: Detail DetailDocument3 pagesMany Animal Dads Help Their Babies.: Detail DetailHasleen Beni100% (1)
- Guiding The Reading Lesson EssentialsDocument3 pagesGuiding The Reading Lesson EssentialsHasleen BeniNo ratings yet
- Grade 2: Literacy Curriculum Map Standards SnapshotDocument7 pagesGrade 2: Literacy Curriculum Map Standards SnapshotHasleen BeniNo ratings yet
- Lesson Plan: About The BookDocument7 pagesLesson Plan: About The BookHasleen BeniNo ratings yet
- Literacy Curriculum Map Year Snapshot: © Learning A-Z All Rights ReservedDocument1 pageLiteracy Curriculum Map Year Snapshot: © Learning A-Z All Rights ReservedHasleen BeniNo ratings yet
- LCM Primary Protocols PDFDocument99 pagesLCM Primary Protocols PDFHasleen BeniNo ratings yet
- Waves and Sound PDFDocument9 pagesWaves and Sound PDFHasleen BeniNo ratings yet
- Grade 1: Literacy Curriculum Map Unit SnapshotDocument28 pagesGrade 1: Literacy Curriculum Map Unit SnapshotHasleen BeniNo ratings yet
- Grade 1: Literacy Curriculum Map Standards SnapshotDocument9 pagesGrade 1: Literacy Curriculum Map Standards SnapshotHasleen BeniNo ratings yet
- University of Utah CVEEN 3510 - Civil Engineering Materials Fall 2015 SyllabusDocument7 pagesUniversity of Utah CVEEN 3510 - Civil Engineering Materials Fall 2015 SyllabusJonathan FelixNo ratings yet
- Tehnology-B: by Gamini Rajakaruna Senior Lecturer International College of Business and Technology Sri LankaDocument142 pagesTehnology-B: by Gamini Rajakaruna Senior Lecturer International College of Business and Technology Sri LankaSachindra Kaushalya PremasiriNo ratings yet
- Additional Catalogue Price List 2020.1Document40 pagesAdditional Catalogue Price List 2020.1pradeep tangiralaNo ratings yet
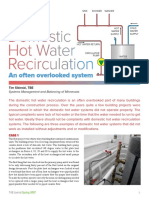
- Domestic Hot Water RecirculationDocument2 pagesDomestic Hot Water Recirculationmoh khNo ratings yet
- Safety Data Sheet: (S) - Lactic Acid About 85% EMPROVE® EXPERT PH Eur, BP, E 270Document10 pagesSafety Data Sheet: (S) - Lactic Acid About 85% EMPROVE® EXPERT PH Eur, BP, E 270Saifur RahmanNo ratings yet
- SRP Assessment Task - FinalDocument12 pagesSRP Assessment Task - Finalapi-507574580No ratings yet
- Proposal Local Participant PDFDocument34 pagesProposal Local Participant PDFpanji respatiNo ratings yet
- STC FittingDocument32 pagesSTC Fittingdj22500No ratings yet
- Lawn and Landscape Watering Schedule - 201905201618099144Document2 pagesLawn and Landscape Watering Schedule - 201905201618099144dragos.gaitanaruNo ratings yet
- Natural Selection LabDocument11 pagesNatural Selection LabAndy YangNo ratings yet
- Water Masaru EmotoDocument10 pagesWater Masaru Emototanzanit13100% (1)
- Water King - Ramesh Chauhan As Social Entrepreneur. Presented byDocument45 pagesWater King - Ramesh Chauhan As Social Entrepreneur. Presented byUrvish PrajapatiNo ratings yet
- (PDF) Current State of Zooplankton Diversity in The Pelagic Zone of Lake Tanganyika Offshore of Bujumbura CityDocument7 pages(PDF) Current State of Zooplankton Diversity in The Pelagic Zone of Lake Tanganyika Offshore of Bujumbura CityDr Ir Lambert NiyoyitungiyeNo ratings yet
- Center Pivot IrrigationDocument23 pagesCenter Pivot IrrigationZIGAME100% (2)
- Akurku Gold Mining ESIMP Report Final Final FinalDocument84 pagesAkurku Gold Mining ESIMP Report Final Final Finaldereje mosissaNo ratings yet
- Framework For Local Government To Implement Integrated Water Resource Management Linked To Water Service DeliveryDocument12 pagesFramework For Local Government To Implement Integrated Water Resource Management Linked To Water Service DeliveryChanel el hifnawyNo ratings yet
- Symmetry: /LCC Model For Evaluation of Pump Units inDocument21 pagesSymmetry: /LCC Model For Evaluation of Pump Units inSPAM WILAYAH INo ratings yet
- Inception Report For Environmental MonitoringDocument49 pagesInception Report For Environmental MonitoringFarhan TaseenNo ratings yet
- Top Mcqs On: Indian ClimateDocument67 pagesTop Mcqs On: Indian ClimateBhat AakeebNo ratings yet
- 2.0 Project Description 2.1: Proposed Domaine de Grand Baie Residential Development - EIA ReportDocument23 pages2.0 Project Description 2.1: Proposed Domaine de Grand Baie Residential Development - EIA ReportProperty TwelveNo ratings yet
- (Urban and Industrial Environments) Andrew Karvonen - Politics of Urban Runoff - Nature, Technology, and The Sustainable City-The MIT Press (2011)Document307 pages(Urban and Industrial Environments) Andrew Karvonen - Politics of Urban Runoff - Nature, Technology, and The Sustainable City-The MIT Press (2011)Florina PtlNo ratings yet
- Mep Spec 3Document80 pagesMep Spec 3loc khaNo ratings yet
- 2.2. Project Report 03.03.2023Document20 pages2.2. Project Report 03.03.2023Technowisdom ConsultantsNo ratings yet
- Marine Pollution Review 22-03-2023Document15 pagesMarine Pollution Review 22-03-2023Aqsa KanwalNo ratings yet
- Evolution and Response Firstpage Schum 1981Document1 pageEvolution and Response Firstpage Schum 1981julian andres diaz aguirreNo ratings yet
- The Home Handyman - May 2016 PDFDocument68 pagesThe Home Handyman - May 2016 PDFzvezdelina100% (1)
- Fun Crocodiles ActivityDocument4 pagesFun Crocodiles ActivityJaredNo ratings yet
- How To Successfully Design A Drainage System For Compliance With The New Urban Stormwater Management Manual by D.I.DDocument135 pagesHow To Successfully Design A Drainage System For Compliance With The New Urban Stormwater Management Manual by D.I.DSiti Aishah Sahul HamidNo ratings yet
- Iir 2011Document438 pagesIir 2011Professor Sameer KulkarniNo ratings yet
- For Building Civil Engineering Works: Hagotech (U) LTDDocument3 pagesFor Building Civil Engineering Works: Hagotech (U) LTDAmpumuza AdrianNo ratings yet
- IGCSE - Bio - Lesson Plan 14 - EcosystemsDocument4 pagesIGCSE - Bio - Lesson Plan 14 - EcosystemsKim GuermacheNo ratings yet