You might also like
- Artificial Intelligence Solutions For Urban Land DynamicsDocument21 pagesArtificial Intelligence Solutions For Urban Land DynamicsMuhammad Faruk Rosya RidhoNo ratings yet
- Iroquois Clothes and WampumDocument3 pagesIroquois Clothes and Wampumapi-254323856No ratings yet
- Model DPR & Application Form For Integrated RAS PDFDocument17 pagesModel DPR & Application Form For Integrated RAS PDFAnbu BalaNo ratings yet
- Entropy 15 02606Document29 pagesEntropy 15 02606Júlia Fernandes Guimarães PereiraNo ratings yet
- Integration of Agent-Based Modeliing and Gis For Urban SimulationDocument9 pagesIntegration of Agent-Based Modeliing and Gis For Urban SimulationJose Manuel MagallanesNo ratings yet
- Agent Based Cellular Automata: A Novel Approach For Modeling Spatiotemporal Growth ProcessesDocument6 pagesAgent Based Cellular Automata: A Novel Approach For Modeling Spatiotemporal Growth ProcessesInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Science Direct - Landscape and Urban Planning - Modelling Dynamic Spatial Processes - Simulation of Urban Future Scenarios ThrougDocument12 pagesScience Direct - Landscape and Urban Planning - Modelling Dynamic Spatial Processes - Simulation of Urban Future Scenarios Througlcirnu123No ratings yet
- Urban Growth Prediction With Parcel Based 3D UrbanDocument22 pagesUrban Growth Prediction With Parcel Based 3D UrbanAeschylusNo ratings yet
- Modeling Urban Dynamics Through GIS-based Cellular Automata: M. Batty, Yichun Xie, Zhanli SunDocument29 pagesModeling Urban Dynamics Through GIS-based Cellular Automata: M. Batty, Yichun Xie, Zhanli SunTony BuNo ratings yet
- Journal Pre-Proof: Building and EnvironmentDocument28 pagesJournal Pre-Proof: Building and EnvironmentAlexandre RezendeNo ratings yet
- Research Article: Urban Planning and Design Layout Generation Based On Artificial IntelligenceDocument10 pagesResearch Article: Urban Planning and Design Layout Generation Based On Artificial Intelligencefirman afriantoNo ratings yet
- Faculty of Management Sciences: Sadat Academy For Management Science Information SystemsDocument58 pagesFaculty of Management Sciences: Sadat Academy For Management Science Information SystemsWagdyNo ratings yet
- Street Voids: Analyzing Street-LevelWalkability Based On 3D Morphology and Remotely Accessible Urban DataDocument17 pagesStreet Voids: Analyzing Street-LevelWalkability Based On 3D Morphology and Remotely Accessible Urban DataElif EnsariNo ratings yet
- MASfor Urban PlanningDocument29 pagesMASfor Urban PlanningSudaf MuhammadNo ratings yet
- Sevtsuk Measuring Growth and Change in Metropolitan FormDocument32 pagesSevtsuk Measuring Growth and Change in Metropolitan FormheraldoferreiraNo ratings yet
- Ai Urban VoidsDocument11 pagesAi Urban VoidspravahaNo ratings yet
- TheUrbanDynamicsEducationalSimulator UDES V1.3 PDFDocument44 pagesTheUrbanDynamicsEducationalSimulator UDES V1.3 PDFFolik AsitNo ratings yet
- TheUrbanDynamicsEducationalSimulator UDES V1.3 PDFDocument44 pagesTheUrbanDynamicsEducationalSimulator UDES V1.3 PDFtetttNo ratings yet
- Developing A Microscopic City Model in SUMO Simulation SystemDocument9 pagesDeveloping A Microscopic City Model in SUMO Simulation SystemjulietNo ratings yet
- Self-Organizing Map and Cellular Automata CombinedDocument8 pagesSelf-Organizing Map and Cellular Automata CombinedMarco Antonio Reséndiz DíazNo ratings yet
- Transportation Research Part A: Ed Manley, Tao ChengDocument10 pagesTransportation Research Part A: Ed Manley, Tao ChengSayani MandalNo ratings yet
- Reference For Framework ProposalDocument6 pagesReference For Framework ProposalKunchala AnilNo ratings yet
- (2023) Smart City Maturity Models - A Multidimensional Synthesized ApproachDocument25 pages(2023) Smart City Maturity Models - A Multidimensional Synthesized ApproachptkfernandesNo ratings yet
- Research and Practice in Three Dimensional City ModelingDocument8 pagesResearch and Practice in Three Dimensional City Modelinganik_kurpNo ratings yet
- Working Papers Series: Paper 109 - Sep 06Document10 pagesWorking Papers Series: Paper 109 - Sep 06Mark J. Burton IINo ratings yet
- Interactive Model of Urban Development in Residential Areas in SkopjeDocument12 pagesInteractive Model of Urban Development in Residential Areas in Skopjesarabiba1971No ratings yet
- Characterizing 3D City ModelinDocument19 pagesCharacterizing 3D City ModelinastudiroNo ratings yet
- Feng Et Al. - 2020 - Learning To Simulate Human MobilityDocument8 pagesFeng Et Al. - 2020 - Learning To Simulate Human MobilityYifei JinNo ratings yet
- Lowry Plan Land UseDocument15 pagesLowry Plan Land UseTarun ThapaNo ratings yet
- 3 D Visual Urban SimulationDocument20 pages3 D Visual Urban SimulationHimanshu YadavNo ratings yet
- The Mobility Topography Model For Substantializing and Projecting Transportation in CitiesDocument10 pagesThe Mobility Topography Model For Substantializing and Projecting Transportation in CitiesBright AdzoneNo ratings yet
- The Timegeo Modeling Framework For Urban Mobility Without Travel SurveysDocument9 pagesThe Timegeo Modeling Framework For Urban Mobility Without Travel SurveysLeonardo BoneloNo ratings yet
- (2023) Smart City Maturity Models - A Multidimensional Synthesized ApproachDocument25 pages(2023) Smart City Maturity Models - A Multidimensional Synthesized ApproachptkfernandesNo ratings yet
- Artificial Intelligence Solutions For Urban Land DDocument22 pagesArtificial Intelligence Solutions For Urban Land DCarlos MenesesNo ratings yet
- Urban Land Use and Economic Growth Modelling: N.Binti - Che.Man@tue - NLDocument18 pagesUrban Land Use and Economic Growth Modelling: N.Binti - Che.Man@tue - NLnoordinichemanNo ratings yet
- The Timegeo Modeling Framework For Urban Mobility Without Travel SurveysDocument9 pagesThe Timegeo Modeling Framework For Urban Mobility Without Travel SurveysCesar David DuarteNo ratings yet
- Using Mobile Laser Scanner and Imagery For Urban Management ApplicationsDocument22 pagesUsing Mobile Laser Scanner and Imagery For Urban Management ApplicationsIAES International Journal of Robotics and AutomationNo ratings yet
- Applsci 12 09169Document16 pagesApplsci 12 09169Pallavi SinghNo ratings yet
- Designing Smart City Mobile Applications: An Initial Grounded TheoryDocument35 pagesDesigning Smart City Mobile Applications: An Initial Grounded TheoryAtestate LiceuNo ratings yet
- Future Generation Computer Systems: Dan Chen Lizhe Wang Samee U. Khan Joanna KołodziejDocument9 pagesFuture Generation Computer Systems: Dan Chen Lizhe Wang Samee U. Khan Joanna KołodziejSeptyawati PasaribuNo ratings yet
- PCP 23 Urban ScienceDocument13 pagesPCP 23 Urban ScienceclaucoleNo ratings yet
- City of SlumsDocument11 pagesCity of SlumsHoshyar Qadir RasulNo ratings yet
- Traffic Simulation ModelingDocument3 pagesTraffic Simulation ModelingAyesha awanNo ratings yet
- Yakubu Full PaperDocument12 pagesYakubu Full Papersalie29296No ratings yet
- Irc 2019Document7 pagesIrc 2019niluka lakmaliNo ratings yet
- 2016 - Cellular Automata Modeling Approaches To Forecast Urban Growth For Adana Turkey A Comparative Approach - Suha BerberogluDocument17 pages2016 - Cellular Automata Modeling Approaches To Forecast Urban Growth For Adana Turkey A Comparative Approach - Suha Berberoglusamarth bhatiaNo ratings yet
- Applsci 12 09169 v2Document15 pagesApplsci 12 09169 v2daenieltan2No ratings yet
- Agent-Based Modelling For Urban Planning Current Limitations and Future TrendsDocument11 pagesAgent-Based Modelling For Urban Planning Current Limitations and Future TrendsJuan TobarNo ratings yet
- Artificial Intelligencebased Realtime Traffic ManagementDocument6 pagesArtificial Intelligencebased Realtime Traffic Managementnishmitharodrigues02No ratings yet
- Trbam S 23 01163Document20 pagesTrbam S 23 01163Rosaldo RossettiNo ratings yet
- 11 Erickson 300Document26 pages11 Erickson 300OrianaFernandezNo ratings yet
- 3D City Model As A First Step Towards Digital TwinDocument8 pages3D City Model As A First Step Towards Digital TwinFariz KiNo ratings yet
- JSMS TemplateDocument15 pagesJSMS TemplateUsman EpendiNo ratings yet
- Semantic 3D City Interfaces-Intelligent InteractioDocument29 pagesSemantic 3D City Interfaces-Intelligent Interactio397451351pxNo ratings yet
- Microscale and Macroscale ModelsDocument8 pagesMicroscale and Macroscale ModelsBOBBY212No ratings yet
- A Study On Roaming Behaviour of Crowd in Public Space With The Analysis in Computer Vision and Agent-Based SimulationDocument10 pagesA Study On Roaming Behaviour of Crowd in Public Space With The Analysis in Computer Vision and Agent-Based SimulationlewisyusongNo ratings yet
- Smart City Data Stream Visualization Using Glyphs: NtroductionDocument5 pagesSmart City Data Stream Visualization Using Glyphs: Ntroductionmaks1702No ratings yet
- Emergence Developing A Model of Complex Urban SystemsDocument7 pagesEmergence Developing A Model of Complex Urban SystemsaniseNo ratings yet
- Evaluation of The Feasibility of An Intelligent Transport System For An Urban AreaDocument12 pagesEvaluation of The Feasibility of An Intelligent Transport System For An Urban AreaIJRASETPublicationsNo ratings yet
- Sustainability 12 10249 v2Document28 pagesSustainability 12 10249 v2Aljen Subillaza del MarNo ratings yet
- Communications Information Existing Models Paper For 2019 DUET Megacity ProjectDocument8 pagesCommunications Information Existing Models Paper For 2019 DUET Megacity ProjectZulaikha AyuNo ratings yet
- Crusader Castle Al-Karak Jordan Levant Pagan Fulk, King of Jerusalem MoabDocument3 pagesCrusader Castle Al-Karak Jordan Levant Pagan Fulk, King of Jerusalem MoabErika CalistroNo ratings yet
- L5T-112 Manual - 2007 - Issue 1.1 PDFDocument16 pagesL5T-112 Manual - 2007 - Issue 1.1 PDFfluidaimaginacionNo ratings yet
- Small Data, Big Decisions: Model Selection in The Small-Data RegimeDocument10 pagesSmall Data, Big Decisions: Model Selection in The Small-Data Regimejuan carlos monasterio saezNo ratings yet
- Sidomuncul20190313064235169 1 PDFDocument298 pagesSidomuncul20190313064235169 1 PDFDian AnnisaNo ratings yet
- PixiiDocument3 pagesPixiiFoxNo ratings yet
- IFSSO Newsletter Jul-Sep 2010Document2 pagesIFSSO Newsletter Jul-Sep 2010rjotaduranNo ratings yet
- Frequently Asked Questions: Lecture 7 To 9 Hydraulic PumpsDocument5 pagesFrequently Asked Questions: Lecture 7 To 9 Hydraulic PumpsJatadhara GSNo ratings yet
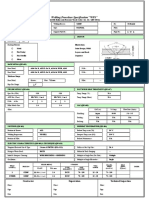
- Wps For Carbon Steel THK 7.11 GtawDocument1 pageWps For Carbon Steel THK 7.11 GtawAli MoosaviNo ratings yet
- Chapter 2Document69 pagesChapter 2Lizi CasperNo ratings yet
- CNC - Rdmacror: Public Static Extern Short Ushort Short Short ShortDocument3 pagesCNC - Rdmacror: Public Static Extern Short Ushort Short Short ShortKession HouNo ratings yet
- EPA Section 608 Type I Open Book ManualDocument148 pagesEPA Section 608 Type I Open Book ManualMehdi AbbasNo ratings yet
- OnTime Courier Software System Requirements PDFDocument1 pageOnTime Courier Software System Requirements PDFbilalNo ratings yet
- ISSA2013Ed CabinStores v100 Часть10Document2 pagesISSA2013Ed CabinStores v100 Часть10AlexanderNo ratings yet
- NHL DB Rulebook ENGLISHDocument6 pagesNHL DB Rulebook ENGLISHAdhika WidyaparagaNo ratings yet
- HC+ Shoring System ScaffoldDocument31 pagesHC+ Shoring System ScaffoldShafiqNo ratings yet
- Retailing PPT (Shailwi Nitish)Document14 pagesRetailing PPT (Shailwi Nitish)vinit PatidarNo ratings yet
- Chandigarh Distilers N BotlersDocument3 pagesChandigarh Distilers N BotlersNipun GargNo ratings yet
- Rwamagana s5 Mathematics CoreDocument4 pagesRwamagana s5 Mathematics Coreevariste.ndungutse1493No ratings yet
- Alto Hotel Melbourne GreenDocument2 pagesAlto Hotel Melbourne GreenShubham GuptaNo ratings yet
- Resa Auditing Theorydocx - CompressDocument64 pagesResa Auditing Theorydocx - CompressMaeNo ratings yet
- 04 Membrane Structure NotesDocument22 pages04 Membrane Structure NotesWesley ChinNo ratings yet
- ACTIX Basic (Sample CDMA)Document73 pagesACTIX Basic (Sample CDMA)radhiwibowoNo ratings yet
- 1 - DIASS Trisha Ma-WPS OfficeDocument2 pages1 - DIASS Trisha Ma-WPS OfficeMae ZelNo ratings yet
- Evolution of Campus Switching: Marketing Presentation Marketing PresentationDocument35 pagesEvolution of Campus Switching: Marketing Presentation Marketing PresentationRosal Mark JovenNo ratings yet
- Introduction of ProtozoaDocument31 pagesIntroduction of ProtozoaEINSTEIN2D100% (2)
- Aqa Ms Ss1a W QP Jun13Document20 pagesAqa Ms Ss1a W QP Jun13prsara1975No ratings yet
- How To Make An Effective PowerPoint PresentationDocument12 pagesHow To Make An Effective PowerPoint PresentationZach Hansen100% (1)
- LET-English-Structure of English-ExamDocument57 pagesLET-English-Structure of English-ExamMarian Paz E Callo80% (5)