You might also like
- F Delmo DC ManualDocument53 pagesF Delmo DC ManualOks OkiNo ratings yet
- Incompact3D User Guide Version 2.0: Sylvain Laizet (Imperial College London)Document13 pagesIncompact3D User Guide Version 2.0: Sylvain Laizet (Imperial College London)Yi ZhouNo ratings yet
- BigDFT Manual 1.4Document35 pagesBigDFT Manual 1.4Sunghyun KimNo ratings yet
- FMTOMO ManualDocument70 pagesFMTOMO ManualCarlos AlejandroNo ratings yet
- Manual ROMS Agrif v2.1 19 07 2010Document91 pagesManual ROMS Agrif v2.1 19 07 2010Isnaini PrihatiningsihNo ratings yet
- The Package: Highlighted Source Code in L TEX: MintedDocument88 pagesThe Package: Highlighted Source Code in L TEX: MintedaaNo ratings yet
- Tutorial Wireless Sensor Network SimulationDocument16 pagesTutorial Wireless Sensor Network SimulationKing Bolade Proxy-AdewaleNo ratings yet
- Networks on Chips: Technology and ToolsFrom EverandNetworks on Chips: Technology and ToolsRating: 5 out of 5 stars5/5 (3)
- An Implementation of WHAM: The Weighted Histogram Analysis MethodDocument18 pagesAn Implementation of WHAM: The Weighted Histogram Analysis MethodWilliam AgudeloNo ratings yet
- Technical NoteDocument7 pagesTechnical Notegelerod250No ratings yet
- Jerasure: A Library in C Facilitating Erasure Coding For Storage ApplicationsDocument37 pagesJerasure: A Library in C Facilitating Erasure Coding For Storage ApplicationsherrwieseNo ratings yet
- Asm LinuxDocument23 pagesAsm LinuxKerbela HüseyinNo ratings yet
- User'S Guide: Tbtrans 4.1.5Document42 pagesUser'S Guide: Tbtrans 4.1.5vijay singhNo ratings yet
- CurveLab Toolbox, Version 2.0Document4 pagesCurveLab Toolbox, Version 2.0Muhammad SajidNo ratings yet
- Veins DocumentationDocument52 pagesVeins DocumentationR AnwarNo ratings yet
- Extending Multi-Runs With Python® and Standalone Engines: Mining SoftwareDocument7 pagesExtending Multi-Runs With Python® and Standalone Engines: Mining SoftwareFreddy MesíasNo ratings yet
- Seiscomp-2 5Document30 pagesSeiscomp-2 5Sahli AyoubNo ratings yet
- The Minted PackageDocument76 pagesThe Minted PackageLuisNo ratings yet
- Velvet ManualDocument22 pagesVelvet ManualmadmarcosNo ratings yet
- SetupDocument16 pagesSetupDeisy M SNo ratings yet
- Lab SamplesDocument22 pagesLab SamplesNormalia SamianNo ratings yet
- The REDEFINE Execution Model: Revision HistoryDocument26 pagesThe REDEFINE Execution Model: Revision HistorySAI NRUSIMHA DEEPAK BURRA SAI NRUSIMHA DEEPAK BURRANo ratings yet
- QMMM Free EnergyDocument13 pagesQMMM Free EnergyinterestingeseNo ratings yet
- CH 1 2 IpoDocument17 pagesCH 1 2 IpoChathuranga Swarna KumaraNo ratings yet
- Pirs801-Egsinprz EgsDocument31 pagesPirs801-Egsinprz EgsSaira DíAlNo ratings yet
- Finroc Crash CourseDocument21 pagesFinroc Crash CourseLuis GonzalesNo ratings yet
- FASMDocument67 pagesFASMhaggar_newNo ratings yet
- Namd-Qm/Mm Tutorial: Unix/Macosx VersionDocument17 pagesNamd-Qm/Mm Tutorial: Unix/Macosx VersionCamila FigueredoNo ratings yet
- MKPROM2 Overview: MKPROM2 Overview Mkprom2 Written by Konrad Eisele May 2013Document12 pagesMKPROM2 Overview: MKPROM2 Overview Mkprom2 Written by Konrad Eisele May 2013Bonnie ThompsonNo ratings yet
- ManualDocument13 pagesManualEng-Mushtaq HejairaNo ratings yet
- A Fortran 90 Tutorial: Zane Dodson Computer Science Department University of New Mexico June 27, 1994Document56 pagesA Fortran 90 Tutorial: Zane Dodson Computer Science Department University of New Mexico June 27, 1994Lucas SantosNo ratings yet
- Primecore 20100222Document23 pagesPrimecore 20100222Thu TrangNo ratings yet
- Diagramas de Feynman LatexDocument44 pagesDiagramas de Feynman LatexDavid Sosa CornelioNo ratings yet
- FASMDocument125 pagesFASMLucas BastosNo ratings yet
- Flat Assembler 1.69: Tomasz GrysztarDocument125 pagesFlat Assembler 1.69: Tomasz GrysztarPiya Lai 昌宏No ratings yet
- Decentralization With Profibus DP DPV1 2ed-07-2003 eDocument254 pagesDecentralization With Profibus DP DPV1 2ed-07-2003 eLinh-son LeTien100% (2)
- MintedDocument84 pagesMintedjekNo ratings yet
- AuvnetsimDocument25 pagesAuvnetsimravikachhotNo ratings yet
- Mpich-3 1 2-InstallguideDocument16 pagesMpich-3 1 2-InstallguideApollo SilvaNo ratings yet
- Manual FeynMFDocument44 pagesManual FeynMFBruno Lima de SouzaNo ratings yet
- Femap Getting StartedDocument148 pagesFemap Getting StartedMSC Nastran BeginnerNo ratings yet
- SetupDocument14 pagesSetupGeEs AnggaNo ratings yet
- Taudem 5.2 Guide To Using The Taudem Command Line Functions For Taudem Multi FileDocument28 pagesTaudem 5.2 Guide To Using The Taudem Command Line Functions For Taudem Multi Filej espirituNo ratings yet
- Tutorial 2013 11 25Document40 pagesTutorial 2013 11 25Elisaveta ZashevaNo ratings yet
- Factor ArticlesDocument99 pagesFactor Articlessome guyNo ratings yet
- Denbi Metagenomics WorkshopDocument21 pagesDenbi Metagenomics WorkshopJack SimNo ratings yet
- Xenomai ImplementationDocument92 pagesXenomai ImplementationSyed Abrar AlviNo ratings yet
- MontecarloDocument44 pagesMontecarloAnand Krishna GhattyNo ratings yet
- STAT/ME 424 and EPD 690 XLISPSTAT QuickstartDocument35 pagesSTAT/ME 424 and EPD 690 XLISPSTAT QuickstartUngureanu BiankaNo ratings yet
- UM1709 User Manual: STM32Cube Ethernet IAP ExampleDocument22 pagesUM1709 User Manual: STM32Cube Ethernet IAP ExampleTameClaudioNo ratings yet
- Imanual 74Document11 pagesImanual 74Jose Belmont DNo ratings yet
- Region-Based Techniques For Modeling and Enhancing Cluster Openmp PerformanceDocument22 pagesRegion-Based Techniques For Modeling and Enhancing Cluster Openmp PerformancedudeabcNo ratings yet
- Sathyabama: Register NumberDocument3 pagesSathyabama: Register NumberRaviNo ratings yet
- TSO/E Rexx ReferenceDocument568 pagesTSO/E Rexx ReferenceNigthstalkerNo ratings yet
- Sandbox (/sandbox) : MODULE (8%) SECTION (14%)Document13 pagesSandbox (/sandbox) : MODULE (8%) SECTION (14%)JITENDRA SINGHNo ratings yet
- Module 2 Integrative Programming 2Document6 pagesModule 2 Integrative Programming 2Randy TabaogNo ratings yet
- Computer Programming: How Can You Create Your Own Software?Document61 pagesComputer Programming: How Can You Create Your Own Software?Monica MariappanNo ratings yet
- MIpgmDocument104 pagesMIpgmrgarcp2348No ratings yet
- Course Overview and IntroductionDocument49 pagesCourse Overview and IntroductionSaad HamayoonNo ratings yet
- SSK5204 Chapter 5: Context-Free Grammars and LanguagesDocument55 pagesSSK5204 Chapter 5: Context-Free Grammars and LanguagesscodrashNo ratings yet
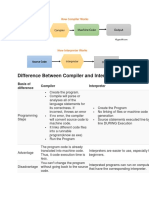
- Difference Between Compiler and InterpreterDocument3 pagesDifference Between Compiler and InterpreterAshish RajputNo ratings yet
- Manual C51Document390 pagesManual C51NagiMahoriNo ratings yet
- Sample QuestionsDocument31 pagesSample QuestionsMaria IgescuNo ratings yet
- Palladium XP TBDocument14 pagesPalladium XP TBrithwik321No ratings yet
- Cantera C++ User's Guide: David G. GoodwinDocument71 pagesCantera C++ User's Guide: David G. GoodwinEdgar JuarezNo ratings yet
- AYUDA MikroC 5.6 PDFDocument996 pagesAYUDA MikroC 5.6 PDFpierdonne50% (2)
- C2 ErefsuDocument86 pagesC2 ErefsujquserNo ratings yet
- Software ConceptS Class XIDocument7 pagesSoftware ConceptS Class XIISHAN SINGHNo ratings yet
- Contracts For Java: A Practical Framework For Contract ProgrammingDocument16 pagesContracts For Java: A Practical Framework For Contract Programmingsagarv48No ratings yet
- C++ Development EnvironmentDocument955 pagesC++ Development EnvironmentRajinder SinghNo ratings yet
- Compiler McqsDocument10 pagesCompiler McqsHamid BashirNo ratings yet
- RBT Levels Marks L1 10marks: Answer Any Three Full QuestionsDocument1 pageRBT Levels Marks L1 10marks: Answer Any Three Full QuestionsJoel JacobNo ratings yet
- Compiler Design - OverviewDocument3 pagesCompiler Design - OverviewAwais AshrafNo ratings yet
- Lexical Analyzer (Compiler Contruction)Document6 pagesLexical Analyzer (Compiler Contruction)touseefaq100% (1)
- Compiled and Interpreted LanguagesDocument15 pagesCompiled and Interpreted Languagesrepale_sagar7630No ratings yet
- Principles of Compiler Design - Tutorial 9Document7 pagesPrinciples of Compiler Design - Tutorial 9dani cabiloNo ratings yet
- Growclust Userguide PDFDocument25 pagesGrowclust Userguide PDFAnonymous xgOHve5No ratings yet
- Visual Cobol Brochure PDFDocument8 pagesVisual Cobol Brochure PDFSubash SubramanianNo ratings yet
- Summer - 18: (C) Explain Any Four Features of Java Programming. 4M AnsDocument14 pagesSummer - 18: (C) Explain Any Four Features of Java Programming. 4M AnsDevidas BhereNo ratings yet
- Chapter One (1) : Introduction To Information Technology (It)Document109 pagesChapter One (1) : Introduction To Information Technology (It)AzS94100% (1)
- C NotesDocument69 pagesC NotesSuman ReddyNo ratings yet
- EWAVR CompilerGuide PDFDocument457 pagesEWAVR CompilerGuide PDFdaniel mpNo ratings yet
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.From EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Rating: 5 out of 5 stars5/5 (34)
- Microsoft Excel Guide for Success: Transform Your Work with Microsoft Excel, Unleash Formulas, Functions, and Charts to Optimize Tasks and Surpass Expectations [II EDITION]From EverandMicrosoft Excel Guide for Success: Transform Your Work with Microsoft Excel, Unleash Formulas, Functions, and Charts to Optimize Tasks and Surpass Expectations [II EDITION]Rating: 5 out of 5 stars5/5 (3)
- PYTHON PROGRAMMING: A Beginner’s Guide To Learn Python From ZeroFrom EverandPYTHON PROGRAMMING: A Beginner’s Guide To Learn Python From ZeroRating: 5 out of 5 stars5/5 (1)
- Nine Algorithms That Changed the Future: The Ingenious Ideas That Drive Today's ComputersFrom EverandNine Algorithms That Changed the Future: The Ingenious Ideas That Drive Today's ComputersRating: 5 out of 5 stars5/5 (8)
- Understanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerFrom EverandUnderstanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerRating: 4.5 out of 5 stars4.5/5 (44)
- What Algorithms Want: Imagination in the Age of ComputingFrom EverandWhat Algorithms Want: Imagination in the Age of ComputingRating: 3.5 out of 5 stars3.5/5 (41)
- Microsoft 365 Guide to Success: 10 Books in 1 | Kick-start Your Career Learning the Key Information to Master Your Microsoft Office Files to Optimize Your Tasks & Surprise Your Colleagues | Access, Excel, OneDrive, Outlook, PowerPoint, Word, Teams, etc.From EverandMicrosoft 365 Guide to Success: 10 Books in 1 | Kick-start Your Career Learning the Key Information to Master Your Microsoft Office Files to Optimize Your Tasks & Surprise Your Colleagues | Access, Excel, OneDrive, Outlook, PowerPoint, Word, Teams, etc.Rating: 5 out of 5 stars5/5 (3)
- Microsoft PowerPoint Guide for Success: Learn in a Guided Way to Create, Edit & Format Your Presentations Documents to Visual Explain Your Projects & Surprise Your Bosses And Colleagues | Big Four Consulting Firms MethodFrom EverandMicrosoft PowerPoint Guide for Success: Learn in a Guided Way to Create, Edit & Format Your Presentations Documents to Visual Explain Your Projects & Surprise Your Bosses And Colleagues | Big Four Consulting Firms MethodRating: 5 out of 5 stars5/5 (6)
- The Advanced Roblox Coding Book: An Unofficial Guide, Updated Edition: Learn How to Script Games, Code Objects and Settings, and Create Your Own World!From EverandThe Advanced Roblox Coding Book: An Unofficial Guide, Updated Edition: Learn How to Script Games, Code Objects and Settings, and Create Your Own World!Rating: 4.5 out of 5 stars4.5/5 (2)
- Microsoft OneNote Guide to Success: Learn In A Guided Way How To Take Digital Notes To Optimize Your Understanding, Tasks, And Projects, Surprising Your Colleagues And ClientsFrom EverandMicrosoft OneNote Guide to Success: Learn In A Guided Way How To Take Digital Notes To Optimize Your Understanding, Tasks, And Projects, Surprising Your Colleagues And ClientsRating: 5 out of 5 stars5/5 (3)
- Clean Code: A Handbook of Agile Software CraftsmanshipFrom EverandClean Code: A Handbook of Agile Software CraftsmanshipRating: 5 out of 5 stars5/5 (13)
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceFrom EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceNo ratings yet
- Competing in the Age of AI: Strategy and Leadership When Algorithms and Networks Run the WorldFrom EverandCompeting in the Age of AI: Strategy and Leadership When Algorithms and Networks Run the WorldRating: 4.5 out of 5 stars4.5/5 (21)
- Cracking the SAP S/4HANA Interview: Get Your Dream Job Today with Intelligent Responses to the EmployerFrom EverandCracking the SAP S/4HANA Interview: Get Your Dream Job Today with Intelligent Responses to the EmployerNo ratings yet
- Agile Metrics in Action: How to measure and improve team performanceFrom EverandAgile Metrics in Action: How to measure and improve team performanceNo ratings yet
- Skill Up: A Software Developer's Guide to Life and CareerFrom EverandSkill Up: A Software Developer's Guide to Life and CareerRating: 4.5 out of 5 stars4.5/5 (40)
- How to Make a Video Game All By Yourself: 10 steps, just you and a computerFrom EverandHow to Make a Video Game All By Yourself: 10 steps, just you and a computerRating: 5 out of 5 stars5/5 (1)
- Linux: The Ultimate Beginner's Guide to Learn Linux Operating System, Command Line and Linux Programming Step by StepFrom EverandLinux: The Ultimate Beginner's Guide to Learn Linux Operating System, Command Line and Linux Programming Step by StepRating: 4.5 out of 5 stars4.5/5 (9)
- GROKKING ALGORITHMS: Simple and Effective Methods to Grokking Deep Learning and Machine LearningFrom EverandGROKKING ALGORITHMS: Simple and Effective Methods to Grokking Deep Learning and Machine LearningNo ratings yet
- Grokking Algorithms: An illustrated guide for programmers and other curious peopleFrom EverandGrokking Algorithms: An illustrated guide for programmers and other curious peopleRating: 4 out of 5 stars4/5 (16)
- C Programming For Beginners: The Simple Guide to Learning C Programming Language Fast!From EverandC Programming For Beginners: The Simple Guide to Learning C Programming Language Fast!Rating: 5 out of 5 stars5/5 (1)
- Monitored: Business and Surveillance in a Time of Big DataFrom EverandMonitored: Business and Surveillance in a Time of Big DataRating: 4 out of 5 stars4/5 (1)