You might also like
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
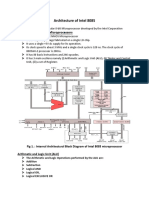
- 1-Architecture of 8085Document34 pages1-Architecture of 8085Pinki KumariNo ratings yet
- 8085 MicroprocessorDocument25 pages8085 Microprocessorprofessor2062No ratings yet
- 8085 MaterialDocument12 pages8085 MaterialsameerNo ratings yet
- 8085 Microprocessor Unit 1Document13 pages8085 Microprocessor Unit 1Sajid Akram100% (1)
- Introduction To 8085 MicroprocessorDocument37 pagesIntroduction To 8085 MicroprocessorAmit BeheraNo ratings yet
- Intel 8085 Microprocessor Architecture GuideDocument18 pagesIntel 8085 Microprocessor Architecture GuideGautamNo ratings yet
- Unit I PDFDocument25 pagesUnit I PDFSomnath2014No ratings yet
- Microprocessor NotesDocument60 pagesMicroprocessor NotesVijay KumarNo ratings yet
- Microprocessor 8085 ArchitectureDocument19 pagesMicroprocessor 8085 ArchitectureSindhujaSindhuNo ratings yet
- Unit Ii 8085 Micro Processor 8085 Architecture:: ME 6702 Mechatronics Mechanical Engineering 2019-20Document26 pagesUnit Ii 8085 Micro Processor 8085 Architecture:: ME 6702 Mechatronics Mechanical Engineering 2019-20GopinathNo ratings yet
- Ee8551 8085 NotesDocument31 pagesEe8551 8085 NotesKUMARANSCRNo ratings yet
- Intel 8085 ArchitectureDocument8 pagesIntel 8085 ArchitectureAravind VJNo ratings yet
- MPMC Eee Unit - III 8051 MicrocontrollerDocument35 pagesMPMC Eee Unit - III 8051 MicrocontrollerAnonymous 4u5XkWGONo ratings yet
- MCT Unit 2Document26 pagesMCT Unit 2Aravind RajNo ratings yet
- 8085 Architecture: Control UnitDocument10 pages8085 Architecture: Control UnitsweetmemoriesneverdiNo ratings yet
- Microprocessor and Micro ControllerDocument118 pagesMicroprocessor and Micro ControllerShiva ShanNo ratings yet
- BGK MPMC Unit-3 Q and ADocument21 pagesBGK MPMC Unit-3 Q and AMallesh ArjaNo ratings yet
- Microprocessor - 8085 ArchitectureDocument4 pagesMicroprocessor - 8085 ArchitectureLithika RameshNo ratings yet
- 8085 Microprocessor - Functional Units: AccumulatorDocument3 pages8085 Microprocessor - Functional Units: AccumulatorANKIT SHARMANo ratings yet
- Microprocessor & microcontroller introductionDocument20 pagesMicroprocessor & microcontroller introductionjeravi84No ratings yet
- Unit I The 8086 MicroprocessorDocument21 pagesUnit I The 8086 Microprocessor16211a0470100% (1)
- 8051 Microcontroller Architecture OverviewDocument28 pages8051 Microcontroller Architecture OverviewPranav SinhaNo ratings yet
- 8085 MICROPROCESSOR: BUS ORGANIZATION AND PIN FUNCTIONSDocument38 pages8085 MICROPROCESSOR: BUS ORGANIZATION AND PIN FUNCTIONSAkshit MalhotraNo ratings yet
- Computer ArchitectureDocument46 pagesComputer ArchitectureSunilAjmeeraNo ratings yet
- Eec Practical 8085 MicroprocessorDocument8 pagesEec Practical 8085 MicroprocessorinxludezNo ratings yet
- MPMC NotesDocument301 pagesMPMC NotesVarinder KumarNo ratings yet
- 8085 Microprocessor ArchitectureDocument3 pages8085 Microprocessor Architecturetguna21No ratings yet
- 8085 Microprocess or ArchitectureDocument39 pages8085 Microprocess or ArchitectureAbhi SharmaNo ratings yet
- unit-1-lect-3 (1)Document16 pagesunit-1-lect-3 (1)tankdhruvik800000No ratings yet
- EET 303 M1Document15 pagesEET 303 M1Rabi khanNo ratings yet
- Programming 8085 Microprocessor ArchitectureDocument34 pagesProgramming 8085 Microprocessor ArchitectureAbhinandan JainNo ratings yet
- Ii Microprocessor - 8085 ArchitectureDocument6 pagesIi Microprocessor - 8085 ArchitectureYohannis DanielNo ratings yet
- Presentation 1Document23 pagesPresentation 1khushalee.chavadaNo ratings yet
- Notes Unit 1Document25 pagesNotes Unit 1Ashish YadavNo ratings yet
- MPC 2Document29 pagesMPC 2rohit sharmaNo ratings yet
- Programming With 8085 MicroprocessorDocument33 pagesProgramming With 8085 MicroprocessorBlackk SpydoNo ratings yet
- UNIT-4: 8085 MicroprocessorDocument28 pagesUNIT-4: 8085 MicroprocessorMuthuvel MNo ratings yet
- MPA UNIT 1 and 2Document48 pagesMPA UNIT 1 and 2Shiva Krishna KamjulaNo ratings yet
- Architecture of 8085 MicroprocessorDocument69 pagesArchitecture of 8085 Microprocessornamrata puranikNo ratings yet
- Microprocessor 8-bit TitleDocument55 pagesMicroprocessor 8-bit TitleAASTHA KIETNo ratings yet
- Class 2-Introduction To 8085 Microprocessor PDFDocument46 pagesClass 2-Introduction To 8085 Microprocessor PDFDeepika AgrawalNo ratings yet
- Basic Concepts of MicroprocessorsDocument32 pagesBasic Concepts of MicroprocessorsAakrati SharmaNo ratings yet
- Microprocessors - II: Yashar HajiyevDocument62 pagesMicroprocessors - II: Yashar HajiyevMurad QəhramanovNo ratings yet
- Unit - Iv Syllabus 8051 MicrocontrollerDocument52 pagesUnit - Iv Syllabus 8051 MicrocontrollerSakthivel Palani100% (1)
- 8085 Features, Signal DescriptionDocument13 pages8085 Features, Signal DescriptionRakesh Kumar DNo ratings yet
- 8085-microprocessor-june29Document9 pages8085-microprocessor-june29Mworozi DicksonNo ratings yet
- Microprocessor and Micro Controller Lecture NotesDocument118 pagesMicroprocessor and Micro Controller Lecture NotesSivanesh SK50% (2)
- 1st Handout 8051Document26 pages1st Handout 8051SaawanBaggNo ratings yet
- FMM Unit-1Document28 pagesFMM Unit-1CS ENo ratings yet
- M4 Yash AllabadiDocument6 pagesM4 Yash Allabadidegijon661No ratings yet
- 03 The Architecture of The 8085Document28 pages03 The Architecture of The 8085Sheena Ann StonehillNo ratings yet
- 8085 Is Pronounced AsDocument9 pages8085 Is Pronounced AsArbaaz khan786No ratings yet
- 8085 Microprocessor - Block DiagramDocument5 pages8085 Microprocessor - Block DiagramShreyash ShindeNo ratings yet
- Microprocessors and Microcontrollers Answer KeyDocument14 pagesMicroprocessors and Microcontrollers Answer KeyselvaNo ratings yet
- Microprocessor 8085 NotesDocument48 pagesMicroprocessor 8085 NotesDewal ChaturvediNo ratings yet
- UNIT 3 MechatronicsDocument38 pagesUNIT 3 MechatronicsMuthuvel M67% (6)
- Blessing Komponen 9 Januari 2024Document255 pagesBlessing Komponen 9 Januari 2024dwikcahyo106No ratings yet
- Manual de Servicio Cama AdvanceDocument698 pagesManual de Servicio Cama AdvanceAbner MorenoNo ratings yet
- M Shahzaib Ali f2018266382 Homework 5Document7 pagesM Shahzaib Ali f2018266382 Homework 5M Shahzaib AliNo ratings yet
- Introduction To Make: ExampleDocument6 pagesIntroduction To Make: ExampleAndré PerdigãoNo ratings yet
- Aa75a-M1t Bios 111028Document35 pagesAa75a-M1t Bios 111028JuscaNo ratings yet
- Sound System Interconnection PDFDocument8 pagesSound System Interconnection PDFfsarkNo ratings yet
- SWI Prolog 6.0.2Document439 pagesSWI Prolog 6.0.2daniel_guizaNo ratings yet
- Digital Dice Game Project for Microprocessors LabDocument20 pagesDigital Dice Game Project for Microprocessors LabSandeep Yadav100% (1)
- Rack FundamentalsDocument48 pagesRack FundamentalsMazuni Zuni MazuniNo ratings yet
- Acer TravelMate 8572 8572Z Quanta ZR9 Rev1ADocument47 pagesAcer TravelMate 8572 8572Z Quanta ZR9 Rev1AContreras CarlosNo ratings yet
- Computer System Architecture Question PaperDocument2 pagesComputer System Architecture Question PaperHimanshu AggarwalNo ratings yet
- AVH-P4400BH AVH-P3400BH AVH-P2400BT AVH-P1400DVD: Owner's ManualDocument112 pagesAVH-P4400BH AVH-P3400BH AVH-P2400BT AVH-P1400DVD: Owner's ManualKevin WatwoodNo ratings yet
- What Is GMSK ModulationDocument5 pagesWhat Is GMSK Modulationtrivedi_urvi9087No ratings yet
- Operation & Safety, Service & Maintenance & Illustrated Parts Manual SupplementDocument68 pagesOperation & Safety, Service & Maintenance & Illustrated Parts Manual SupplementSebastian Alejandro RománNo ratings yet
- Making A Wooden Clockworks 2Document8 pagesMaking A Wooden Clockworks 2MiguelDelBarrioIglesisasNo ratings yet
- Processes and Threads: Modern Operating SystemsDocument62 pagesProcesses and Threads: Modern Operating SystemsSherry DkNo ratings yet
- Assignment 2 QP MPMC - ITDocument1 pageAssignment 2 QP MPMC - ITProjectsNo ratings yet
- Ms-Cit Question SetDocument9 pagesMs-Cit Question SetchetanaNo ratings yet
- 094 Table Saw SecretsDocument52 pages094 Table Saw SecretsLic. Luis Calderón Pérez100% (2)
- HT7 L4815 V 100Document9 pagesHT7 L4815 V 100Enéas BaroneNo ratings yet
- Protocol EncapsulationDocument1 pageProtocol EncapsulationPratik P PatelNo ratings yet
- DP MassStorage 15064 DriversDocument1,448 pagesDP MassStorage 15064 DriversShanmugavel SvNo ratings yet
- Jesd79 2F PDFDocument128 pagesJesd79 2F PDFChandan ChoudhuryNo ratings yet
- Juniper OS Getting Started Guide For Routing DevicesDocument62 pagesJuniper OS Getting Started Guide For Routing Devicesst3liosNo ratings yet
- Asuro Manual EnglishDocument82 pagesAsuro Manual EnglishElena Moldovan100% (1)
- Work Management: Course and Exercise ManualDocument73 pagesWork Management: Course and Exercise ManualracrabeNo ratings yet
- GEK 91764 543 Control GroupDocument90 pagesGEK 91764 543 Control GroupTorredoNo ratings yet
- How To Order An 4100U SPS As A Service PartDocument2 pagesHow To Order An 4100U SPS As A Service PartOney Enrique Mendez MercadoNo ratings yet
- FUTURE OF COMPUTERSDocument18 pagesFUTURE OF COMPUTERSkavya_repalaNo ratings yet
- Multimedia System (New Additional) Amar PanchalDocument35 pagesMultimedia System (New Additional) Amar Panchalnishit91No ratings yet