You might also like
- Basic Structured Grid Generation: With an introduction to unstructured grid generationFrom EverandBasic Structured Grid Generation: With an introduction to unstructured grid generationNo ratings yet
- Topology Optimization of Sheet Metal Brackets Using ANSYSDocument7 pagesTopology Optimization of Sheet Metal Brackets Using ANSYSMarcoNo ratings yet
- Optimal Truss Design Using Genetic AlgorithmsDocument18 pagesOptimal Truss Design Using Genetic AlgorithmsalfonsoNo ratings yet
- Stacking Sequence Optimization With Genetic Algorithm Using A Two-Level ApproximationDocument11 pagesStacking Sequence Optimization With Genetic Algorithm Using A Two-Level Approximationzeeshanahmad111No ratings yet
- Genetic Algorithms, Function Optimization, and Facility Layout DesignDocument25 pagesGenetic Algorithms, Function Optimization, and Facility Layout DesignAlptekin TorunNo ratings yet
- Optimization of Dynamic Systems: A Trigonometric Differential Evolution ApproachDocument9 pagesOptimization of Dynamic Systems: A Trigonometric Differential Evolution ApproachSyamasree RahaNo ratings yet
- Topology OptimizationDocument40 pagesTopology OptimizationjeorgeNo ratings yet
- Analysis and Optimization of Truss StructuresDocument10 pagesAnalysis and Optimization of Truss StructuresGogyNo ratings yet
- Design of Truss-Structures For Minimum Weight Using Genetic AlgorithmsDocument19 pagesDesign of Truss-Structures For Minimum Weight Using Genetic AlgorithmsSai RamNo ratings yet
- Adaptive Chaotic Marine Predators Hill Climbing Algorithm For Large-Scale Design OptimizationsDocument26 pagesAdaptive Chaotic Marine Predators Hill Climbing Algorithm For Large-Scale Design OptimizationsSagar BhargavaNo ratings yet
- Global Optimization of Trusses With Constraints On Number of Different Cross-Sections: A Mixed-Integer Second-Order Cone Programming ApproachDocument34 pagesGlobal Optimization of Trusses With Constraints On Number of Different Cross-Sections: A Mixed-Integer Second-Order Cone Programming ApproachGogyNo ratings yet
- Composite v17Document33 pagesComposite v17slamoriniereNo ratings yet
- 1 s2.0 S0377221713000908 Main PDFDocument11 pages1 s2.0 S0377221713000908 Main PDFAngga Eka PrasetyaNo ratings yet
- Review of Literature: 2.1 Conventional MethodsDocument17 pagesReview of Literature: 2.1 Conventional Methodssimranarora2007No ratings yet
- A Quantitative Comparison Between Size Shape TopolDocument22 pagesA Quantitative Comparison Between Size Shape TopolHareesh PanakkalNo ratings yet
- ZhouAndRozvany92 DCOCTheoryDocument14 pagesZhouAndRozvany92 DCOCTheoryJeff HNo ratings yet
- Hybrid Cellular Automata in Structural Design Optimization: Andrés Tovar and John E. RenaudDocument22 pagesHybrid Cellular Automata in Structural Design Optimization: Andrés Tovar and John E. RenaudAndres TovarNo ratings yet
- Response Surface Approximation of Pareto Optimal Front in Multi-Objective OptimizationDocument15 pagesResponse Surface Approximation of Pareto Optimal Front in Multi-Objective OptimizationspuzzarNo ratings yet
- Different Approaches To Defining CellsDocument6 pagesDifferent Approaches To Defining CellsMichael ThompsonNo ratings yet
- Genetic Algorithm For The Travelling Salesman Problem Using Enhanced Sequential Constructive Crossover OperatorDocument11 pagesGenetic Algorithm For The Travelling Salesman Problem Using Enhanced Sequential Constructive Crossover OperatorAI Coordinator - CSC JournalsNo ratings yet
- Inteligencia Artificial: Adriana Villa-Murillo, Andr Es Carri On and Antonio SozziDocument17 pagesInteligencia Artificial: Adriana Villa-Murillo, Andr Es Carri On and Antonio SozziSebastian Vallejo RangelNo ratings yet
- Ijcs 2016 0303001 PDFDocument7 pagesIjcs 2016 0303001 PDFeditorinchiefijcsNo ratings yet
- Deformation of StructuresDocument13 pagesDeformation of StructuresPompy JoeNo ratings yet
- De Miguel 2017Document31 pagesDe Miguel 2017DinaNo ratings yet
- Optimization of Laminated Composites Using Genetic AlgorithmDocument3 pagesOptimization of Laminated Composites Using Genetic Algorithmsel2183vamNo ratings yet
- Optimization of Spatial Truss Towers Based On RAO AlgorithmsDocument12 pagesOptimization of Spatial Truss Towers Based On RAO AlgorithmsGogyNo ratings yet
- Topology Optimization of Fluid Problems Using Genetic Algorithm Assisted by The Kriging ModelDocument19 pagesTopology Optimization of Fluid Problems Using Genetic Algorithm Assisted by The Kriging ModelrajibNo ratings yet
- Dechter Constraint ProcessingDocument40 pagesDechter Constraint Processingnani subrNo ratings yet
- TMP DC73Document17 pagesTMP DC73FrontiersNo ratings yet
- An Efficient 3D Toplogy Optimization Code Written in MATLABDocument22 pagesAn Efficient 3D Toplogy Optimization Code Written in MATLABBarraq_00No ratings yet
- A 99 Line Topology Optimization Code Written in MatlabDocument8 pagesA 99 Line Topology Optimization Code Written in MatlabOmar Eladel MahmoudNo ratings yet
- Optimum Bracing Point (S) For Long Columns Under Uniaxially Loading Conditions Using Pattern SearchDocument14 pagesOptimum Bracing Point (S) For Long Columns Under Uniaxially Loading Conditions Using Pattern SearchTJPRC PublicationsNo ratings yet
- Optimization Using TOSCADocument16 pagesOptimization Using TOSCAJunyan GuoNo ratings yet
- Solving Unique Shortest Path Problems Using Ant Colony OptimisationDocument26 pagesSolving Unique Shortest Path Problems Using Ant Colony Optimisationiskon_jskNo ratings yet
- Quasi-Arithmetic FiltersDocument33 pagesQuasi-Arithmetic FiltersANDRES DAVID GUEVARA MENDOZANo ratings yet
- Truss OptimizationDocument8 pagesTruss OptimizationOthmanHamdyNo ratings yet
- AsiarPaicific Journal of Operational Research Vol. 21, No. 4 (2004)Document17 pagesAsiarPaicific Journal of Operational Research Vol. 21, No. 4 (2004)prasanna241186No ratings yet
- L. Marchisio, Dennis Vigil, O. Fox - 2003 - Implementation of The Quadrature Method of Moments in CFD Codes For Aggregation-Breakage ProDocument15 pagesL. Marchisio, Dennis Vigil, O. Fox - 2003 - Implementation of The Quadrature Method of Moments in CFD Codes For Aggregation-Breakage ProlgroscheNo ratings yet
- J.Stefanovic, Milovancevic PDFDocument6 pagesJ.Stefanovic, Milovancevic PDFJelena Stefanovic MarinovicNo ratings yet
- RePAMO PDFDocument19 pagesRePAMO PDFRonald JosephNo ratings yet
- 12 Multiobjective Optimization of Space Structures Under Static and Seismic Loading ConditionsDocument28 pages12 Multiobjective Optimization of Space Structures Under Static and Seismic Loading ConditionsxelmerxNo ratings yet
- 2019 TASEA Two-Layer Adaptive Surrogate-Assisted Evolutionary Algorithm For High-Dimensional Computationally Expensive ProblemsDocument33 pages2019 TASEA Two-Layer Adaptive Surrogate-Assisted Evolutionary Algorithm For High-Dimensional Computationally Expensive ProblemsZhangming WuNo ratings yet
- 0000070Document28 pages0000070Ramesh JangalaNo ratings yet
- Enhancing Decision Combination in Classifier Committee Via Positional VotingDocument11 pagesEnhancing Decision Combination in Classifier Committee Via Positional Votingjacekt89No ratings yet
- Paper 21-Reducing Attributes in Rough Set TheoryDocument9 pagesPaper 21-Reducing Attributes in Rough Set TheorySatish Reddy MallidiNo ratings yet
- Size and Topological Optimization of Cantilever BeamDocument6 pagesSize and Topological Optimization of Cantilever BeamseventhsensegroupNo ratings yet
- Genetic Algorithm-Based Structural Form ExplorationDocument8 pagesGenetic Algorithm-Based Structural Form ExplorationPatrycja MicheraNo ratings yet
- Constrained Mean-Variance Mapping Optimization For Truss Optimization ProblemsDocument17 pagesConstrained Mean-Variance Mapping Optimization For Truss Optimization ProblemsVenkatesh VarmaNo ratings yet
- Efficiently Computing Optimal Paths of Arbitrary Clearance from Navigation MeshesDocument10 pagesEfficiently Computing Optimal Paths of Arbitrary Clearance from Navigation MeshesJoren JoestarNo ratings yet
- Objective Function & ConstraintsDocument14 pagesObjective Function & ConstraintsgobinathNo ratings yet
- Development of The Experimental Spatial Matrix Identification Method (Theory and Basic Verification With A Frame Structure)Document18 pagesDevelopment of The Experimental Spatial Matrix Identification Method (Theory and Basic Verification With A Frame Structure)opachecoNo ratings yet
- Variational Shape Approximation: David Cohen-Steiner Duke U. Pierre Alliez Inria Mathieu Desbrun U. of So. CalDocument10 pagesVariational Shape Approximation: David Cohen-Steiner Duke U. Pierre Alliez Inria Mathieu Desbrun U. of So. Caljmckin_2010No ratings yet
- Journal of Constructional Steel Research: A. Kaveh, A. Shakouri Mahmud AbadiDocument6 pagesJournal of Constructional Steel Research: A. Kaveh, A. Shakouri Mahmud AbadiamirbehnamNo ratings yet
- Michael D. Moffitt and Martha E. Pollack - Optimal Rectangle Packing: A Meta-CSP ApproachDocument10 pagesMichael D. Moffitt and Martha E. Pollack - Optimal Rectangle Packing: A Meta-CSP ApproachMnaomNo ratings yet
- Optimal Design of Single-Layer Barrel Vault Frames Using Improved Magnetic Charged System SearchDocument26 pagesOptimal Design of Single-Layer Barrel Vault Frames Using Improved Magnetic Charged System SearchAntonio HenryNo ratings yet
- Fidelity-Induced Interpretable Policy Extraction For Reinforcement LearningDocument11 pagesFidelity-Induced Interpretable Policy Extraction For Reinforcement Learningabdul basit magsiNo ratings yet
- Transferability Analysis of Data-Driven Additive Manufacturing Knowledge: A Case Study Between Powder Bed Fusion and Directed Energy DepositionDocument11 pagesTransferability Analysis of Data-Driven Additive Manufacturing Knowledge: A Case Study Between Powder Bed Fusion and Directed Energy Depositionabdul basit magsiNo ratings yet
- Modeling Recommender Ecosystems: Research Challenges at The Intersection of Mechanism Design, Reinforcement Learning and Generative ModelsDocument24 pagesModeling Recommender Ecosystems: Research Challenges at The Intersection of Mechanism Design, Reinforcement Learning and Generative Modelsabdul basit magsiNo ratings yet
- Chebyshev ParticlesDocument19 pagesChebyshev Particlesabdul basit magsiNo ratings yet
- Maths Trigonometry Ratios & Identities Combine PDFDocument14 pagesMaths Trigonometry Ratios & Identities Combine PDFraghavendra jNo ratings yet
- Femh 110Document16 pagesFemh 110ramesh_balakNo ratings yet
- Engineering Drawing and Graphics - Basant Agrawal & C M Agrawal - Multiple Choice QuestionsDocument4 pagesEngineering Drawing and Graphics - Basant Agrawal & C M Agrawal - Multiple Choice QuestionsShahbaz Alam0% (2)
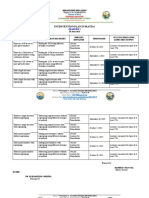
- Q1 - Math 6 - Intervention - PlanDocument2 pagesQ1 - Math 6 - Intervention - PlanElmer pascualNo ratings yet
- One - Step - Equations - Easy - WorksheetDocument2 pagesOne - Step - Equations - Easy - WorksheetShanyce MartinNo ratings yet
- GCSE Maths Edexcel Sample Calculator (Paper 2)Document20 pagesGCSE Maths Edexcel Sample Calculator (Paper 2)Umer AnwarNo ratings yet
- t13 PDFDocument8 pagest13 PDFMaroshia MajeedNo ratings yet
- Response of A Continuous Guideway On Equally Spaced Supports Traversed by A Moving VehicleDocument7 pagesResponse of A Continuous Guideway On Equally Spaced Supports Traversed by A Moving VehicleanirbanNo ratings yet
- New Century Mathematics 8 SyllabusDocument12 pagesNew Century Mathematics 8 SyllabusDee Jay Monteza Cabungan100% (1)
- Arvi Soil Test Reports NewDocument12 pagesArvi Soil Test Reports NewsugumarasbNo ratings yet
- Clojure Cheat Sheet (Clojure 1.6 - 1.9, sheet v44Document2 pagesClojure Cheat Sheet (Clojure 1.6 - 1.9, sheet v44Bogdan IvanovNo ratings yet
- Mathematical Induction and RecursionDocument11 pagesMathematical Induction and RecursionJoseph DacanayNo ratings yet
- Gauss Quadrature Rule for Numerical IntegrationDocument13 pagesGauss Quadrature Rule for Numerical Integrationmanjumv27No ratings yet
- Imc2021day1 ProblemsDocument3 pagesImc2021day1 ProblemsLaura StephanieNo ratings yet
- Hamilton, Rodrigues, and The Quaternion Scandal: Mathematics MagazineDocument19 pagesHamilton, Rodrigues, and The Quaternion Scandal: Mathematics MagazineG CNo ratings yet
- MMW Module 1 - NATURE OF MATHEMATICSDocument12 pagesMMW Module 1 - NATURE OF MATHEMATICSSandreiAngelFloresDuralNo ratings yet
- Lecture 4 Slides DFT Sampling TheoremDocument32 pagesLecture 4 Slides DFT Sampling TheoremhaldoisNo ratings yet
- Multi-Step Word Problems in FractionsDocument2 pagesMulti-Step Word Problems in Fractionsjohnny abalosNo ratings yet
- Divergence and curl explainedDocument5 pagesDivergence and curl explainedpoma7218No ratings yet
- General Academic Strand: Grade11 Grade 12 First Semester Second Semester First Semester Second SemesterDocument1 pageGeneral Academic Strand: Grade11 Grade 12 First Semester Second Semester First Semester Second SemesterRdy Cabral Jr.No ratings yet
- Eglash Ron African Fractals Modern Computing and Indigenous DesignDocument265 pagesEglash Ron African Fractals Modern Computing and Indigenous DesignSylvia Sánchez100% (1)
- Africa Beza College: Chapter 2: Correlation Theory Pre-Test QuestionsDocument11 pagesAfrica Beza College: Chapter 2: Correlation Theory Pre-Test QuestionsAmanuel GenetNo ratings yet
- Notes On Forest MensurationDocument75 pagesNotes On Forest MensurationVicente MacielNo ratings yet
- Module 2 - TrigonometryDocument15 pagesModule 2 - TrigonometryJake Canlas100% (1)
- Or Unit 1 Internals-CompressedDocument61 pagesOr Unit 1 Internals-CompressedKhushi LakhaniNo ratings yet
- Secondary Checkpoint - Math (1112) Specimen 2014 Paper 1Document16 pagesSecondary Checkpoint - Math (1112) Specimen 2014 Paper 1Maria Isabella HarsonoNo ratings yet
- Elective 5 Mathematical Systems PDFDocument54 pagesElective 5 Mathematical Systems PDFAlan Peter100% (3)
- ST 2Document11 pagesST 2yyNo ratings yet
- Certified Solidworks Professional Advanced Weldments Exam PreparationFrom EverandCertified Solidworks Professional Advanced Weldments Exam PreparationRating: 5 out of 5 stars5/5 (1)
- FreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsFrom EverandFreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsRating: 5 out of 5 stars5/5 (1)
- Certified Solidworks Professional Advanced Surface Modeling Exam PreparationFrom EverandCertified Solidworks Professional Advanced Surface Modeling Exam PreparationRating: 5 out of 5 stars5/5 (1)
- From Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsFrom EverandFrom Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsNo ratings yet
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)From EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Rating: 5 out of 5 stars5/5 (2)
- Mastering Autodesk Inventor 2014 and Autodesk Inventor LT 2014: Autodesk Official PressFrom EverandMastering Autodesk Inventor 2014 and Autodesk Inventor LT 2014: Autodesk Official PressRating: 5 out of 5 stars5/5 (1)
- SolidWorks 2015 Learn by doing-Part 2 (Surface Design, Mold Tools, and Weldments)From EverandSolidWorks 2015 Learn by doing-Part 2 (Surface Design, Mold Tools, and Weldments)Rating: 4.5 out of 5 stars4.5/5 (5)
- Autodesk Inventor | Step by Step: CAD Design and FEM Simulation with Autodesk Inventor for BeginnersFrom EverandAutodesk Inventor | Step by Step: CAD Design and FEM Simulation with Autodesk Inventor for BeginnersNo ratings yet
- Beginning AutoCAD® 2020 Exercise WorkbookFrom EverandBeginning AutoCAD® 2020 Exercise WorkbookRating: 2.5 out of 5 stars2.5/5 (3)
- Autodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersFrom EverandAutodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersNo ratings yet
- Fusion 360 | Step by Step: CAD Design, FEM Simulation & CAM for Beginners.From EverandFusion 360 | Step by Step: CAD Design, FEM Simulation & CAM for Beginners.No ratings yet
- The Geometrical Tolerancing Desk Reference: Creating and Interpreting ISO Standard Technical DrawingsFrom EverandThe Geometrical Tolerancing Desk Reference: Creating and Interpreting ISO Standard Technical DrawingsRating: 4.5 out of 5 stars4.5/5 (10)