You might also like
- ADS Circuit Design Cookbook PDFDocument124 pagesADS Circuit Design Cookbook PDFMario Luis Tavares FerreiraNo ratings yet
- On The Machine Learning-Based Smart Beamforming For Wireless Virtualization With Large-Scale MIMO SystemDocument11 pagesOn The Machine Learning-Based Smart Beamforming For Wireless Virtualization With Large-Scale MIMO Systemdtvt2006No ratings yet
- Implementation of An Adaptive Antenna Array Using The TMS320C541Document11 pagesImplementation of An Adaptive Antenna Array Using The TMS320C541Harshvardhan ChoudharyNo ratings yet
- Transmit Antenna Selection For Massive MIMO: A Knapsack Problem FormulationDocument6 pagesTransmit Antenna Selection For Massive MIMO: A Knapsack Problem FormulationFarah AkifNo ratings yet
- Switching Scheme For A FMCW-MIMO Radar On A Moving PlatformDocument4 pagesSwitching Scheme For A FMCW-MIMO Radar On A Moving PlatformJeong-geun KimNo ratings yet
- Spatial Modulation - Optimal Detection and Performance AnalysisDocument3 pagesSpatial Modulation - Optimal Detection and Performance AnalysisAliakbar AlastiNo ratings yet
- 5G-NR Radio Interface - MIMO and Beamforming: 6.1. Multiplexing Techniques 6.1.1. MIMO MechanismDocument30 pages5G-NR Radio Interface - MIMO and Beamforming: 6.1. Multiplexing Techniques 6.1.1. MIMO MechanismTrung Quy ChiêuNo ratings yet
- 5253 978-1-4799-0356-6/13/$31.00 ©2013 Ieee Icassp 2013Document5 pages5253 978-1-4799-0356-6/13/$31.00 ©2013 Ieee Icassp 2013Pappo TotoNo ratings yet
- COMSNETS Published PaperDocument4 pagesCOMSNETS Published PaperSoumyadeep DattaNo ratings yet
- A Novel Approach For A MIMO FMCW Radar System With Frequency Steered Antennas For 3D Target LocalizationDocument4 pagesA Novel Approach For A MIMO FMCW Radar System With Frequency Steered Antennas For 3D Target LocalizationJoe MullerNo ratings yet
- Joint Trajectory and Computation Offloading Optimization For UAV-assisted MEC With NOMADocument6 pagesJoint Trajectory and Computation Offloading Optimization For UAV-assisted MEC With NOMAAnh Nhat NguyenNo ratings yet
- Dip. Elettronica e Informazione, Politecnico Di Milano, Italy E-Mail: (Molteni, Nicoli) @elet - Polimi.itDocument4 pagesDip. Elettronica e Informazione, Politecnico Di Milano, Italy E-Mail: (Molteni, Nicoli) @elet - Polimi.itebrahim61No ratings yet
- Mutual Interference Mitigation For Automotive Radar SystemsDocument6 pagesMutual Interference Mitigation For Automotive Radar SystemsBulijiojioNo ratings yet
- SM-MMSE Simultaneous SSDocument6 pagesSM-MMSE Simultaneous SSTheodoros TsiftsisNo ratings yet
- Performance Evaluation of SC-FDMA Uplink Block Transmission Schemes Using Iterative Receiver TechniquesDocument5 pagesPerformance Evaluation of SC-FDMA Uplink Block Transmission Schemes Using Iterative Receiver TechniquespjdtorresNo ratings yet
- Macro-Diversity Versus Micro-Diversity System Capacity With Realistic Receiver RFFE ModelDocument6 pagesMacro-Diversity Versus Micro-Diversity System Capacity With Realistic Receiver RFFE ModelHazem Tarek MahmoudNo ratings yet
- A Distributed Connectivity Maintenance Algorithm For A Network of Unmanned Underwater Vehicles Under Communication ConstraintsDocument6 pagesA Distributed Connectivity Maintenance Algorithm For A Network of Unmanned Underwater Vehicles Under Communication ConstraintsGopesh KrishnaNo ratings yet
- Performance Analysis of Rls Over Lms Algorithm For Mse in Adaptive FiltersDocument5 pagesPerformance Analysis of Rls Over Lms Algorithm For Mse in Adaptive FiltersNikhil CherianNo ratings yet
- Mabruk Jour Adaptive Full PaperDocument19 pagesMabruk Jour Adaptive Full PapermgheryaniNo ratings yet
- Energy Efficient Channel Estimation in MIMO Systems: Sarod Yatawatta, Athina P. Petropulu Charles J. GraffDocument4 pagesEnergy Efficient Channel Estimation in MIMO Systems: Sarod Yatawatta, Athina P. Petropulu Charles J. GraffgbafnaNo ratings yet
- MU-MIMO BC Handy FormulaeDocument2 pagesMU-MIMO BC Handy Formulaeboss_bandorNo ratings yet
- 3D Multi-Beam and Null Synthesis by Phase-Only Control For 5G Antenna ArraysDocument13 pages3D Multi-Beam and Null Synthesis by Phase-Only Control For 5G Antenna Arraysdtvt2006No ratings yet
- Data Throughputs Using Multiple-Input Multiple-Output (Mimo) Techniques in A Noise-Limited Cellular EnvironmentDocument40 pagesData Throughputs Using Multiple-Input Multiple-Output (Mimo) Techniques in A Noise-Limited Cellular EnvironmentloaidNo ratings yet
- MIMO AlgorithmDocument3 pagesMIMO AlgorithmMaher ArarNo ratings yet
- UWB System Based On The Modified Gegenbauer Function in MISO ChannelDocument7 pagesUWB System Based On The Modified Gegenbauer Function in MISO ChannelPhu NguyenNo ratings yet
- Proceedings of Spie: EM Modeling of Far-Field Radiation Patterns For Antennas On The GMA-TT UAVDocument9 pagesProceedings of Spie: EM Modeling of Far-Field Radiation Patterns For Antennas On The GMA-TT UAVNorozKhanNo ratings yet
- 2006 Wireless Relay Communications Using An Unmanned Aerial VehicleDocument5 pages2006 Wireless Relay Communications Using An Unmanned Aerial Vehicletoan đinhNo ratings yet
- Adaptive Regularized Zero-Forcing Beamforming in MDocument14 pagesAdaptive Regularized Zero-Forcing Beamforming in MkiranpatruduNo ratings yet
- Fault Location in Radial Distribution Lines Using Travelling Waves and Network TheoryDocument6 pagesFault Location in Radial Distribution Lines Using Travelling Waves and Network TheoryJuan CarlosNo ratings yet
- Mroueh 2015Document6 pagesMroueh 2015isaanisaanNo ratings yet
- Weighted Subspace Fitting For Two-Dimension DOA Estimation in Massive MIMO SystemsDocument8 pagesWeighted Subspace Fitting For Two-Dimension DOA Estimation in Massive MIMO SystemsJavier MelendrezNo ratings yet
- Uwb PDFDocument5 pagesUwb PDFHinduja IcchapuramNo ratings yet
- A Study of Sample Matrix Inversion Algorithm For PDFDocument5 pagesA Study of Sample Matrix Inversion Algorithm For PDFRamya RNo ratings yet
- A Cross-Layer Optimization of IEEE 802.11 MAC For Wireless Multihop NetworksDocument3 pagesA Cross-Layer Optimization of IEEE 802.11 MAC For Wireless Multihop NetworksjollydmelloNo ratings yet
- Uwb Isbc2010 Full PaperDocument5 pagesUwb Isbc2010 Full PaperUche ChudeNo ratings yet
- Joint Energy and Route Optimization in MIMO Wireless Sensor NetworksDocument6 pagesJoint Energy and Route Optimization in MIMO Wireless Sensor NetworksSheikh OmarNo ratings yet
- A Metaheuristic Approach For Propagation-Model Tuning in LTE NetworksDocument10 pagesA Metaheuristic Approach For Propagation-Model Tuning in LTE NetworksSuranga SampathNo ratings yet
- Circular Patch Microstrip Array AntennaDocument5 pagesCircular Patch Microstrip Array Antennaesra8No ratings yet
- Multiple Input Multiple Output Channel Model For Simulation of and - Diversity Wireless SystemsDocument7 pagesMultiple Input Multiple Output Channel Model For Simulation of and - Diversity Wireless Systemsbajrang bansalNo ratings yet
- Spatial Scheduling Algorithms For Wireless SystemsDocument4 pagesSpatial Scheduling Algorithms For Wireless Systemsthemartinmspam2490No ratings yet
- Complex Variational Mode Decomposition For Signal ProcessingDocument11 pagesComplex Variational Mode Decomposition For Signal Processing0902au11mt14No ratings yet
- Fade Margin Calculation RiccianDocument4 pagesFade Margin Calculation RiccianjpollemisNo ratings yet
- Paper ID 502Document9 pagesPaper ID 502swapna44No ratings yet
- 2019 Zhang Tian Shao Unwrapping CNNDocument10 pages2019 Zhang Tian Shao Unwrapping CNNDiego Eusse NaranjoNo ratings yet
- Wavelet Based Compressive Sensing Techniques For Image CompressionDocument6 pagesWavelet Based Compressive Sensing Techniques For Image CompressiondwipradNo ratings yet
- CM Kaltfl 080709Document5 pagesCM Kaltfl 080709Võ Quy QuangNo ratings yet
- 1 - First Preparing - Paper 2Document8 pages1 - First Preparing - Paper 2asem elfekyNo ratings yet
- Data-Driven-Based Beam Selection For Hybrid Beamforming in Ultra-Dense NetworksDocument10 pagesData-Driven-Based Beam Selection For Hybrid Beamforming in Ultra-Dense NetworksSofia BouchenakNo ratings yet
- Rainbow Link Beamforming Technology and Relevant AnalysisDocument10 pagesRainbow Link Beamforming Technology and Relevant Analysislovedxxxg520No ratings yet
- Visually Improved Understanding of Three-Dimensionally Propagating Electromagnetic Fields in Wireless NetworksDocument8 pagesVisually Improved Understanding of Three-Dimensionally Propagating Electromagnetic Fields in Wireless NetworkstahaunswNo ratings yet
- Spread Spectrum Ultrasonic Positioning SystemDocument6 pagesSpread Spectrum Ultrasonic Positioning SystemTuấn DũngNo ratings yet
- A Calibration System and Perturbation Analysis For The Modulated Wideband ConverterDocument4 pagesA Calibration System and Perturbation Analysis For The Modulated Wideband ConverterShafayat AbrarNo ratings yet
- Of Cdma: Performance Multi-Code in A Multipath Fading ChannelDocument6 pagesOf Cdma: Performance Multi-Code in A Multipath Fading Channelfeku fekuNo ratings yet
- Vu 2019Document6 pagesVu 2019Sofia Kara MostefaNo ratings yet
- Cramer Rao Bound On Target Localization Estimation in MIMO Radar SystemsDocument6 pagesCramer Rao Bound On Target Localization Estimation in MIMO Radar Systemsprobability2No ratings yet
- International Journal of C Information and Systems Sciences Computing and InformationDocument10 pagesInternational Journal of C Information and Systems Sciences Computing and Informationss_18No ratings yet
- Beamforming: Fundamentals To Implementation: Luc Langlois, Director Products & Emerging Technologies /5G AvnetDocument24 pagesBeamforming: Fundamentals To Implementation: Luc Langlois, Director Products & Emerging Technologies /5G AvnetANDRES MORALESNo ratings yet
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsFrom EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNo ratings yet
- Differential Forms on Electromagnetic NetworksFrom EverandDifferential Forms on Electromagnetic NetworksRating: 4 out of 5 stars4/5 (1)
- Electronics 11 01036 v2Document14 pagesElectronics 11 01036 v2kasun prabhathNo ratings yet
- DynamicclusteringDocument6 pagesDynamicclusteringkasun prabhathNo ratings yet
- ECE642: Detection & Estimation Theory (Fall 21) Solutions To Homework 01Document7 pagesECE642: Detection & Estimation Theory (Fall 21) Solutions To Homework 01kasun prabhathNo ratings yet
- Name/Signature: EE496B - Controls Lab - Fall 2021Document2 pagesName/Signature: EE496B - Controls Lab - Fall 2021kasun prabhathNo ratings yet
- EE558 - Digital Communications - Spring 2021 Assignment 6 - Due Date: 12/02/2021Document3 pagesEE558 - Digital Communications - Spring 2021 Assignment 6 - Due Date: 12/02/2021kasun prabhathNo ratings yet
- Foster Seeley DiscriminatorDocument2 pagesFoster Seeley DiscriminatorDebesh Bar100% (1)
- TW8800) 05.14.12 - ReaderDocument16 pagesTW8800) 05.14.12 - ReaderJavier iimareNo ratings yet
- Basic Op-Amp Circuit AnalysisDocument13 pagesBasic Op-Amp Circuit AnalysisItoroItaNo ratings yet
- Heart Beat Monitoring Using Wireless ConnectionDocument7 pagesHeart Beat Monitoring Using Wireless ConnectionjosephfelixNo ratings yet
- Fifth Semester Wireless Communication Two Marks With Answers Regulation 2013Document12 pagesFifth Semester Wireless Communication Two Marks With Answers Regulation 2013PRIYA RAJI78% (9)
- Time Division MultiplexingDocument5 pagesTime Division Multiplexingkv1 iqNo ratings yet
- Homework 1 PDFDocument2 pagesHomework 1 PDFRao Arslan RajputNo ratings yet
- Ruckus Wireless MF2501 ManualDocument52 pagesRuckus Wireless MF2501 ManualtechsolutionstnNo ratings yet
- 7477.00 Low Broadband Cross Polarized: Powerwave Single Broadband AntennasDocument1 page7477.00 Low Broadband Cross Polarized: Powerwave Single Broadband AntennasJura GirskiNo ratings yet
- GSSI UtilityScanDFBrochure PDFDocument2 pagesGSSI UtilityScanDFBrochure PDFJoel AlonzoNo ratings yet
- DSB SC Final ProjectDocument14 pagesDSB SC Final ProjectOscar Mauricio Sarmiento UrbinaNo ratings yet
- Setting Up A Fiber Optic Analog LinkDocument6 pagesSetting Up A Fiber Optic Analog LinkDayanand Gowda KrNo ratings yet
- Siemens C35 (I) M35 (I) S35i Service Manual LVL 25e v10Document35 pagesSiemens C35 (I) M35 (I) S35i Service Manual LVL 25e v10carlicosgmNo ratings yet
- Final PPT of 7th SemDocument24 pagesFinal PPT of 7th SemRaghav JhaNo ratings yet
- GTC 081001Document16 pagesGTC 081001Joseph Thomas100% (1)
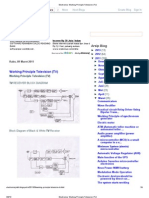
- Electronics - Working Principle Television (TV)Document9 pagesElectronics - Working Principle Television (TV)Suman DasNo ratings yet
- TPNA-1000 DatasheetDocument6 pagesTPNA-1000 DatasheetzeugenioNo ratings yet
- Signals & Systems Hand Written NotesDocument442 pagesSignals & Systems Hand Written NotesvishwanathNo ratings yet
- MultiRate 2Document178 pagesMultiRate 2IamINNo ratings yet
- RF Applications in Digital Signal Processing: T. SchilcherDocument35 pagesRF Applications in Digital Signal Processing: T. SchilcherswjangNo ratings yet
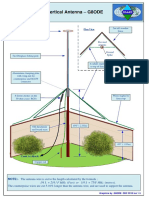
- 20m Elevated Vertical G8ode Iss 1 31Document5 pages20m Elevated Vertical G8ode Iss 1 31leonardo_manzanoNo ratings yet
- RLC Circuits PDFDocument4 pagesRLC Circuits PDFtuvvacNo ratings yet
- 1 Lesson2 DigitalCommunicationDocument10 pages1 Lesson2 DigitalCommunicationQhadija JulkanainNo ratings yet
- Siemens TelecomDocument60 pagesSiemens TelecomsisfNo ratings yet
- Antenna SpecificationsDocument3 pagesAntenna SpecificationsCamelia CernatNo ratings yet
- Cryptography CA2Document11 pagesCryptography CA2Atreyi chattopadhyayNo ratings yet
- Rahul Ingle - Image ProcessingDocument4 pagesRahul Ingle - Image ProcessingTMSNo ratings yet
- Hm5530 ManuDocument24 pagesHm5530 ManuAmna MajidNo ratings yet
- 3g Serving Cell Events Active Set Monitored SetDocument9 pages3g Serving Cell Events Active Set Monitored Settrxopti9100% (9)