You might also like
- Introductory College Mathematics: with Linear Algebra and Finite MathematicsFrom EverandIntroductory College Mathematics: with Linear Algebra and Finite MathematicsRating: 1 out of 5 stars1/5 (1)
- Maths Full Marks TermIIDocument392 pagesMaths Full Marks TermIIMahavir Jain100% (4)
- Study Material Mathematics Class Xii 2022 - 2023 Ziet MysoreDocument74 pagesStudy Material Mathematics Class Xii 2022 - 2023 Ziet MysoreNorla LamaNo ratings yet
- Cbse Class X Question Bank For Sa-II 2013-14Document149 pagesCbse Class X Question Bank For Sa-II 2013-14sridevi73No ratings yet
- Domain and Range of Graphs Practice Worksheet ANSWERSDocument3 pagesDomain and Range of Graphs Practice Worksheet ANSWERSgayNo ratings yet
- Syllabus IBMDocument28 pagesSyllabus IBMManas KhareNo ratings yet
- Mathematics - Term - IiDocument190 pagesMathematics - Term - IiHargun Kaur GroverNo ratings yet
- III SEM ME-CH 31 Unit - IDocument132 pagesIII SEM ME-CH 31 Unit - IJoash Clavin John ClaytonNo ratings yet
- Sylla Math 11 01 12 2022Document6 pagesSylla Math 11 01 12 2022SakshamNo ratings yet
- 22MAT11 - ALL BranchesDocument3 pages22MAT11 - ALL BranchesDr. Chandrakala SBNo ratings yet
- Conceptual and Procedural Performance of Undergraduate Students in IntegrationDocument13 pagesConceptual and Procedural Performance of Undergraduate Students in IntegrationEndah Nawang WulanNo ratings yet
- S3 Ma Sow (2013)Document13 pagesS3 Ma Sow (2013)Francis Ho HoNo ratings yet
- Mathematics Second YearDocument3 pagesMathematics Second YearSwapan DasNo ratings yet
- Real AnlaysisDocument79 pagesReal AnlaysisSaheer AliNo ratings yet
- 10 Maths EMDocument4 pages10 Maths EMPokemon MasterNo ratings yet
- Telangana State Council of Higher EducationDocument28 pagesTelangana State Council of Higher EducationAmtech MubeenNo ratings yet
- Too Good Revision Guide c1Document134 pagesToo Good Revision Guide c1Shalini JainNo ratings yet
- Selfstudys Com FileDocument6 pagesSelfstudys Com Filekirodiwalanuj7No ratings yet
- CBSE Class 12 Maths SyllabusDocument6 pagesCBSE Class 12 Maths Syllabusanshu dudiNo ratings yet
- Pure Mathematics AM 27: SyllabusDocument15 pagesPure Mathematics AM 27: SyllabusAshley MorganNo ratings yet
- MathDocument7 pagesMathSudha SinghNo ratings yet
- 9740 - 2012 Math SyllabusDocument20 pages9740 - 2012 Math SyllabusCheong Pak Hon StanNo ratings yet
- GCE N Level Add-Mathematics (4039 - 2012)Document13 pagesGCE N Level Add-Mathematics (4039 - 2012)Winson ChuaNo ratings yet
- Problems Using ScilabDocument28 pagesProblems Using Scilabdeepika snehiNo ratings yet
- Engineering Mathematics IIDocument4 pagesEngineering Mathematics IIYocobSamandrewsNo ratings yet
- 2nd Semester 6Document17 pages2nd Semester 6Komal singhNo ratings yet
- I. M.sc. Maths & Computing Syllabus AR 2018Document122 pagesI. M.sc. Maths & Computing Syllabus AR 2018Preetam KumarNo ratings yet
- Sekolah Menengah Kebangsaan Air Molek Form 5 Additional Mathematics Scheme of Work 2013Document15 pagesSekolah Menengah Kebangsaan Air Molek Form 5 Additional Mathematics Scheme of Work 2013Green QingNo ratings yet
- La SyllabusDocument5 pagesLa SyllabusPrajwal MeshramNo ratings yet
- CBCS - GE For BA and BCom (Prog)Document6 pagesCBCS - GE For BA and BCom (Prog)Kunal chandoliyaNo ratings yet
- Syllabus30 Class 10thengDocument20 pagesSyllabus30 Class 10thengSANTHOSH KUMARNo ratings yet
- Linear Algebra and Calculus 2019 Syllabus Ktustudents - inDocument8 pagesLinear Algebra and Calculus 2019 Syllabus Ktustudents - inNEERAJ T PNo ratings yet
- UGCF2022Maths Fourth To Sixth Semester SyllabusDocument88 pagesUGCF2022Maths Fourth To Sixth Semester Syllabusnull26816No ratings yet
- MathsDocument11 pagesMathsSudarshan RajputNo ratings yet
- MathsDocument338 pagesMathsSudarshan RajputNo ratings yet
- CBSE Grade XII Maths Supplementary Material 2017-18Document203 pagesCBSE Grade XII Maths Supplementary Material 2017-18vyom911100% (1)
- Mathematics (X) (CODE NO. 041) Session 2021-22 Term-Wise SyllabusDocument6 pagesMathematics (X) (CODE NO. 041) Session 2021-22 Term-Wise SyllabusDeath lucky gamerNo ratings yet
- Syllabus For S1 and S2 KTUmodified15.06.2016Document70 pagesSyllabus For S1 and S2 KTUmodified15.06.2016Mahesh Kumar K BNo ratings yet
- Syllabus Session-2020-21 Class - X Subject: Mathematics (Code: 041 & 241)Document4 pagesSyllabus Session-2020-21 Class - X Subject: Mathematics (Code: 041 & 241)VIPUL SEMWALNo ratings yet
- 24644.AM121 - 2020 ChalkpadDocument3 pages24644.AM121 - 2020 ChalkpadChhavi GargNo ratings yet
- AMaths 4 (NA) 4039 Syllabus 2011Document13 pagesAMaths 4 (NA) 4039 Syllabus 2011Winson ChuaNo ratings yet
- UT Dallas Syllabus For cs3341.501 05f Taught by Pankaj Choudhary (pkc022000)Document3 pagesUT Dallas Syllabus For cs3341.501 05f Taught by Pankaj Choudhary (pkc022000)UT Dallas Provost's Technology GroupNo ratings yet
- IntroductoryCourse TrigonometryDocument18 pagesIntroductoryCourse TrigonometryAzhar QadriNo ratings yet
- MCA R S1 S2 - Compressed - Compressed Min 1 1Document159 pagesMCA R S1 S2 - Compressed - Compressed Min 1 1NamithaNo ratings yet
- Basic Mathematics PDFDocument4 pagesBasic Mathematics PDFvims1248993100% (1)
- 5500icbteg - Am WeDocument5 pages5500icbteg - Am WeKamal SurenNo ratings yet
- Engg Maths1Document4 pagesEngg Maths1AnuNo ratings yet
- Ug Syllabus 202906Document14 pagesUg Syllabus 202906pavanaparamesh11No ratings yet
- Add Maths Fast Track Sow Year 9 310807 v2Document9 pagesAdd Maths Fast Track Sow Year 9 310807 v2Ya YaNo ratings yet
- FileDocument100 pagesFilelalithasaranya018No ratings yet
- 2017 A Level 9758 H2 Math Paper 1 Solution and Paper 2 Likely QuestionsDocument20 pages2017 A Level 9758 H2 Math Paper 1 Solution and Paper 2 Likely QuestionsKeiran Tan100% (1)
- 11 KV 2Document100 pages11 KV 2AmiraNo ratings yet
- MATHEMATICS Minor SyllabusDocument49 pagesMATHEMATICS Minor SyllabusanushafiNo ratings yet
- 22MATS11Document5 pages22MATS11Ashutosh kumar MishraNo ratings yet
- 3.5.5. Question BankDocument10 pages3.5.5. Question BankPrudhvi Raghu Teja100% (1)
- CBSE Class 11 Maths Syllabus 2022Document9 pagesCBSE Class 11 Maths Syllabus 2022cakravartin servicesNo ratings yet
- MTH 1112Document11 pagesMTH 1112Nurfarina HusseinNo ratings yet
- Pre-Requisites:: Engineering Mathematics - IiDocument14 pagesPre-Requisites:: Engineering Mathematics - IiSanjaykumar KmNo ratings yet
- REVIEWDocument184 pagesREVIEWAr-Jhay MercadoNo ratings yet
- Ababou Isomorphism TheoremDocument3 pagesAbabou Isomorphism TheoremFred100% (1)
- BartleDocument11 pagesBartleLucius Adonai67% (3)
- MAE 150 Homework 6Document12 pagesMAE 150 Homework 6Zerbin GisNo ratings yet
- Chapter Three: 3.2 Legendre Equation and Legendre PolynomialsDocument73 pagesChapter Three: 3.2 Legendre Equation and Legendre PolynomialsPatrick SibandaNo ratings yet
- Lecture Notes of MAT203Document101 pagesLecture Notes of MAT203siddharthNo ratings yet
- Formula Notes Signals and SystemsDocument23 pagesFormula Notes Signals and SystemsimmadiuttejNo ratings yet
- LC of Error FunctionDocument7 pagesLC of Error Function孟栋梁No ratings yet
- 2020 Cohort Handout On Chapter 17.2-17.3 - Further Differentiation - Teacher'sDocument18 pages2020 Cohort Handout On Chapter 17.2-17.3 - Further Differentiation - Teacher'sSharia NehaNo ratings yet
- Section 0.3b Domains of Composite Functions PDFDocument4 pagesSection 0.3b Domains of Composite Functions PDFLavan NimsNo ratings yet
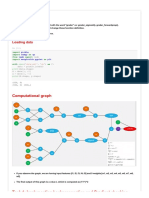
- Backpropagation: Loading DataDocument12 pagesBackpropagation: Loading Datasatyamgovilla007_747No ratings yet
- Functional Series. Pointwise and Uniform ConvergenceDocument17 pagesFunctional Series. Pointwise and Uniform ConvergenceProbenEksNo ratings yet
- DFT Matrix - WikipediaDocument4 pagesDFT Matrix - WikipediaAvani BosanNo ratings yet
- Diff Equation and Laplace Transform Nirali Prakashan BSC BookDocument138 pagesDiff Equation and Laplace Transform Nirali Prakashan BSC BookAbu BakkerNo ratings yet
- Unit IiDocument35 pagesUnit IiSridhar KandlaguntaNo ratings yet
- BMEN 525 Course NotesDocument52 pagesBMEN 525 Course NotesSuraj_73No ratings yet
- GemesSzentmiklossy Math Analysis Excercises IDocument321 pagesGemesSzentmiklossy Math Analysis Excercises IgwiazdaplatynyNo ratings yet
- Gen. Math Module 4Document4 pagesGen. Math Module 4Robert ClavoNo ratings yet
- MA 106: Linear Algebra Tutorial 2: Prof. B.V. Limaye IIT DharwadDocument5 pagesMA 106: Linear Algebra Tutorial 2: Prof. B.V. Limaye IIT Dharwadamar BaroniaNo ratings yet
- Fixed Point ThoremDocument21 pagesFixed Point ThoremsurajyellowkiteNo ratings yet
- Unit-Vi: Mathematics-II (7HC16)Document32 pagesUnit-Vi: Mathematics-II (7HC16)Kola KeerthanaNo ratings yet
- Lecture 02 Calculus II 22Document30 pagesLecture 02 Calculus II 22Rafeek makramNo ratings yet
- Complex Number Problems - 26357387 PDFDocument9 pagesComplex Number Problems - 26357387 PDFNavdeep BajajNo ratings yet
- Sample Solutions For Exercise Sheet 2Document8 pagesSample Solutions For Exercise Sheet 2Jair CarneiroNo ratings yet
- Question Bank MOD and Indefinite IntegrationDocument15 pagesQuestion Bank MOD and Indefinite IntegrationRAKTIM ROUTHNo ratings yet
- Lesson 3.3 Derivative of Logarithmic Functions 1Document11 pagesLesson 3.3 Derivative of Logarithmic Functions 1Leirance MalonzoNo ratings yet
- Solution Methods: Laplace Transform and Series Solutions of OdesDocument24 pagesSolution Methods: Laplace Transform and Series Solutions of OdesAbi DemNo ratings yet
- Lesson 1 Derivative of Trigonometric FunctionsDocument17 pagesLesson 1 Derivative of Trigonometric FunctionsStevenzel Eala EstellaNo ratings yet
- (Encyclopaedia of Mathematical Sciences, Invariant Theory and Algebraic Transformation Groups 135., 6) Martin Lorenz - Multiplicative Invariant Theory-Springer (2005)Document178 pages(Encyclopaedia of Mathematical Sciences, Invariant Theory and Algebraic Transformation Groups 135., 6) Martin Lorenz - Multiplicative Invariant Theory-Springer (2005)Juan GarciaNo ratings yet