You might also like
- Age and Gender Detection-3Document20 pagesAge and Gender Detection-3Anand Dubey67% (12)
- 11.3.1 Explore Students Book G4U. A2Document176 pages11.3.1 Explore Students Book G4U. A2Silvestre QuezadaNo ratings yet
- Max Prefab Catalog of Prefab HousesDocument25 pagesMax Prefab Catalog of Prefab Houseswilliam mutheeNo ratings yet
- Deep Reinforcement Learning in Mario: Final Project Report of CS747: Foundations of Intelligent Learning AgentsDocument6 pagesDeep Reinforcement Learning in Mario: Final Project Report of CS747: Foundations of Intelligent Learning AgentsToonz NetworkNo ratings yet
- Learning Environment Models in Car Racing Using Stateful Genetic ProgrammingDocument9 pagesLearning Environment Models in Car Racing Using Stateful Genetic ProgrammingZed MohamNo ratings yet
- Ai PDFDocument14 pagesAi PDF289No ratings yet
- Sentiment Analysis For Movies Reviews Dataset Using Deep Learning ModelsDocument9 pagesSentiment Analysis For Movies Reviews Dataset Using Deep Learning ModelsLewis TorresNo ratings yet
- Talbi 2021Document37 pagesTalbi 2021Khadija M.No ratings yet
- Advanced Skin Category Prediction System For Cosmetic Suggestion Using Deep Convolution Neural Network Report FinalDocument52 pagesAdvanced Skin Category Prediction System For Cosmetic Suggestion Using Deep Convolution Neural Network Report Finalajeyanajeyan3No ratings yet
- Drowsy Driver Detection Using Deep LearningDocument10 pagesDrowsy Driver Detection Using Deep LearningIJRASETPublicationsNo ratings yet
- Activation Functions BookDocument20 pagesActivation Functions BooksoNo ratings yet
- Major Project On: "Age and Gender Detection Master''Document28 pagesMajor Project On: "Age and Gender Detection Master''Vijay LakshmiNo ratings yet
- A Driving Decision Strategy (DDS) Based On Machine Learning For An Autonomous VehicleDocument55 pagesA Driving Decision Strategy (DDS) Based On Machine Learning For An Autonomous Vehiclemaniesha1438No ratings yet
- A Comparative Study On Semantic Segmentation Algorithms For Autonomous Driving VehiclesDocument10 pagesA Comparative Study On Semantic Segmentation Algorithms For Autonomous Driving VehiclesIJRASETPublicationsNo ratings yet
- Authors: Rupali & Japuneet Kaur Bajwa: M.Tech. (CSE)Document57 pagesAuthors: Rupali & Japuneet Kaur Bajwa: M.Tech. (CSE)RupaliNo ratings yet
- SRS Sample For Students (2) FINAL (1) - Pages-Deleted (1) - Converted 1Document21 pagesSRS Sample For Students (2) FINAL (1) - Pages-Deleted (1) - Converted 1MANSI KAUSHIKNo ratings yet
- A Study On Effects of Data Augmentation in DetectionDocument13 pagesA Study On Effects of Data Augmentation in DetectionSuman BhurtelNo ratings yet
- Neural Road Semantic Segmentation in Driving Scenarios PDFDocument6 pagesNeural Road Semantic Segmentation in Driving Scenarios PDFdavidiancuNo ratings yet
- Enhanced Software Effort Estimation Using Multi Layered Feed Forward Artificial Neural Network TechniqueDocument6 pagesEnhanced Software Effort Estimation Using Multi Layered Feed Forward Artificial Neural Network TechniquePoonam RijwaniNo ratings yet
- Vehicle Make and Model Recognition Using Mixed Sample Data Augmentation TechniquesDocument9 pagesVehicle Make and Model Recognition Using Mixed Sample Data Augmentation TechniquesIAES IJAINo ratings yet
- Impact of Image Resizing On Deep Learning Detectors For Training Time and Model PerformanceDocument8 pagesImpact of Image Resizing On Deep Learning Detectors For Training Time and Model Performancebryansantoso8585No ratings yet
- (IJCST-V11I2P12) :V. Raghu Ram Chowdary, G. Tejaswini, E. Divya, K. Adity, M. Varjan BabuDocument14 pages(IJCST-V11I2P12) :V. Raghu Ram Chowdary, G. Tejaswini, E. Divya, K. Adity, M. Varjan BabuEighthSenseGroupNo ratings yet
- ADA Project Report - 2 067Document9 pagesADA Project Report - 2 067Jai ChaudhryNo ratings yet
- AbstractDocument17 pagesAbstractKIRTINo ratings yet
- A Review of Studies On Machine Learning Techniques: Yogesh SinghDocument15 pagesA Review of Studies On Machine Learning Techniques: Yogesh SinghVaibhavNo ratings yet
- Electronics 11 02707 v2Document13 pagesElectronics 11 02707 v2Debapriya MitraNo ratings yet
- Design and Evolution of Deep Convolutional Neural Networks in Image Classification - A ReviewDocument13 pagesDesign and Evolution of Deep Convolutional Neural Networks in Image Classification - A ReviewVatsala B RNo ratings yet
- Image Caption Bot With Keras and Speech Generation ForDocument7 pagesImage Caption Bot With Keras and Speech Generation ForPujan CozuNo ratings yet
- Dss On Life InsuranceDocument20 pagesDss On Life InsuranceKirtika SharmaNo ratings yet
- Legal Document AnalysisDocument12 pagesLegal Document AnalysisIJRASETPublicationsNo ratings yet
- Teaching Operating Systems Concepts With Execution VisualizationDocument15 pagesTeaching Operating Systems Concepts With Execution Visualizationn.mranasNo ratings yet
- Deep Learning Techniques: An Overview: January 2021Document11 pagesDeep Learning Techniques: An Overview: January 2021Anonymous 9qlmzmlqxwNo ratings yet
- Abstracts For Analyzing With Answers 1-16Document9 pagesAbstracts For Analyzing With Answers 1-16Hồ ToànNo ratings yet
- Evolution of Hybrid Distance Based KNN ClassificationDocument9 pagesEvolution of Hybrid Distance Based KNN ClassificationIAES IJAINo ratings yet
- 2017 Ieee Tits KuangDocument10 pages2017 Ieee Tits KuangWafa BenzaouiNo ratings yet
- A Brief Survey and An Application of SemDocument38 pagesA Brief Survey and An Application of SemodufowokanayotomiwaNo ratings yet
- A Framework For Software Defect Prediction Using Neural NetworksDocument11 pagesA Framework For Software Defect Prediction Using Neural NetworksarmanNo ratings yet
- A Review On Deep Learning Approaches To Image Classification and Object Segmentation 1Document23 pagesA Review On Deep Learning Approaches To Image Classification and Object Segmentation 1g_31682896No ratings yet
- A Review On Deep Learning Approaches To Image Classification and Object Segmentation 1Document23 pagesA Review On Deep Learning Approaches To Image Classification and Object Segmentation 1g_31682896No ratings yet
- Software Defect Prediction Using Machine LearningDocument5 pagesSoftware Defect Prediction Using Machine LearningbcacollegebanasthaliNo ratings yet
- NILES2021 Paper 43Document5 pagesNILES2021 Paper 43ANIMESH PATRONo ratings yet
- Investigating The Role of Code Smells in Preventive MaintenanceDocument23 pagesInvestigating The Role of Code Smells in Preventive MaintenanceJunaidNo ratings yet
- Performance Analysis of Supervised Machine Learning Techniques For Sentiment AnalysisDocument6 pagesPerformance Analysis of Supervised Machine Learning Techniques For Sentiment AnalysisLenynquirogaNo ratings yet
- Software Cost Estimation PDFDocument6 pagesSoftware Cost Estimation PDFsheela uppalagallaNo ratings yet
- Teaching Operating Systems Concepts With Execution VisualizationDocument15 pagesTeaching Operating Systems Concepts With Execution VisualizationIan Illy AleraNo ratings yet
- Assignment 5 AiDocument3 pagesAssignment 5 AiPiyush BhandariNo ratings yet
- PAPER PUBLISH - EditedDocument9 pagesPAPER PUBLISH - EditedKranti SriNo ratings yet
- An Innovative Anomaly Driving Detection Strategy For Adaptive FCW of CNN ApproachDocument6 pagesAn Innovative Anomaly Driving Detection Strategy For Adaptive FCW of CNN Approachmariatul qibtiahNo ratings yet
- Tensorflow: A System For Large-Scale Machine LearningDocument21 pagesTensorflow: A System For Large-Scale Machine Learningpatilrushal824No ratings yet
- IJCA Paper-F Ver 28-4-2018Document12 pagesIJCA Paper-F Ver 28-4-2018Ashraf Sayed AbdouNo ratings yet
- IT Abstract 1-10 KeyDocument5 pagesIT Abstract 1-10 KeyNhật NguyễnNo ratings yet
- Comparative Analysis of Deep Learning Image Detection AlgorithmsDocument27 pagesComparative Analysis of Deep Learning Image Detection AlgorithmsArin Cantika musiNo ratings yet
- Ijcet: International Journal of Computer Engineering & Technology (Ijcet)Document9 pagesIjcet: International Journal of Computer Engineering & Technology (Ijcet)IAEME PublicationNo ratings yet
- Image Classification Using ResnetDocument28 pagesImage Classification Using ResnetshilpaNo ratings yet
- Image Caption GenerationDocument8 pagesImage Caption GenerationLâm Thế TàiNo ratings yet
- 03of22 - Reinforcement Evolutionary Learning For Neuro-Fuzzy Controller DesignDocument27 pages03of22 - Reinforcement Evolutionary Learning For Neuro-Fuzzy Controller DesignBranko NikolicNo ratings yet
- Advance Deep LearningDocument10 pagesAdvance Deep LearningAlia KhanNo ratings yet
- Speech Based Emotion RecognitionDocument8 pagesSpeech Based Emotion RecognitionIJRASETPublicationsNo ratings yet
- 2015 LecunDocument10 pages2015 LecunArshad MohammedNo ratings yet
- Driver'S Drowsiness Detection System: Bachelor of Technology in Computer Science and Engineering byDocument18 pagesDriver'S Drowsiness Detection System: Bachelor of Technology in Computer Science and Engineering byShanker Yadav0% (1)
- Car Popularity PredictionDocument5 pagesCar Popularity Prediction008 Ravuri SivaRamNo ratings yet
- DEEP LEARNING TECHNIQUES: CLUSTER ANALYSIS and PATTERN RECOGNITION with NEURAL NETWORKS. Examples with MATLABFrom EverandDEEP LEARNING TECHNIQUES: CLUSTER ANALYSIS and PATTERN RECOGNITION with NEURAL NETWORKS. Examples with MATLABNo ratings yet
- CDIIC Presentation - COSIEMADocument22 pagesCDIIC Presentation - COSIEMABalasundaram SrinivasaluNo ratings yet
- Ece Vii Power Electronics (10ec73) AssignmentDocument6 pagesEce Vii Power Electronics (10ec73) AssignmentThomas PriceNo ratings yet
- Model of Utilization of Human Power For Garden Lighting: Project ReportDocument59 pagesModel of Utilization of Human Power For Garden Lighting: Project Reportvivek patilNo ratings yet
- Fluorodyne EX Grade EDF Filter-: High-Capacity Sterility Control With Superior ValueDocument12 pagesFluorodyne EX Grade EDF Filter-: High-Capacity Sterility Control With Superior ValueVeryco BudiantoNo ratings yet
- 30 Minute Shortbread Cookies - Cloudy KitchenDocument2 pages30 Minute Shortbread Cookies - Cloudy Kitchenharidas venkateshNo ratings yet
- Braided Flexible Connector FlangedDocument1 pageBraided Flexible Connector FlangedkuraimundNo ratings yet
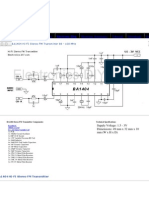
- Ba 1404Document9 pagesBa 1404Tesfaye WoldemeskelNo ratings yet
- Civil Service Reviewer 2023 WORD ANALOGY PART 2Document24 pagesCivil Service Reviewer 2023 WORD ANALOGY PART 2queency lee pairatNo ratings yet
- Annex 6: Guidance On Good Manufacturing Practices (GMP) : Inspection ReportDocument5 pagesAnnex 6: Guidance On Good Manufacturing Practices (GMP) : Inspection Reportumarn1582No ratings yet
- Abb Elog All181212Document68 pagesAbb Elog All181212Teo soon howNo ratings yet
- 2.2 Biological Molecules - Proteins QPDocument24 pages2.2 Biological Molecules - Proteins QPsuccesshustlerclubNo ratings yet
- Assignment 123Document23 pagesAssignment 123Usama MughalNo ratings yet
- English Tricks PDF 1Document24 pagesEnglish Tricks PDF 1Academic worldNo ratings yet
- Studio PhotographyDocument225 pagesStudio Photographyvbwrites100% (2)
- 2 Summative Test in Science Grade 7: San Pedro Integrated SchoolDocument2 pages2 Summative Test in Science Grade 7: San Pedro Integrated SchoolDennisNo ratings yet
- Building Design + Construction - July 2019 PDFDocument60 pagesBuilding Design + Construction - July 2019 PDFebt555100% (1)
- Operation ManagementDocument32 pagesOperation ManagementTABAHI YADAVNo ratings yet
- Soft Materials in Technology and BiologyDocument62 pagesSoft Materials in Technology and Biologyironmonkey00No ratings yet
- Flexural Bond Strength of Masonry: Standard Test Methods ForDocument5 pagesFlexural Bond Strength of Masonry: Standard Test Methods Fordiego rodriguez100% (1)
- MHT CET 2017 COEP Round1 Cutoff PDFDocument41 pagesMHT CET 2017 COEP Round1 Cutoff PDFRUPESH DHARMENo ratings yet
- CEC15-Single Objective Optimization Competition - ExpensiveDocument17 pagesCEC15-Single Objective Optimization Competition - Expensivejdpatel28No ratings yet
- CimoryDocument1 pageCimorymauza.collection12No ratings yet
- DerangementDocument5 pagesDerangementRoxiNo ratings yet
- Residential and Retail Market Analysis For The Lafitte CorridorDocument1 pageResidential and Retail Market Analysis For The Lafitte CorridorBobYuNo ratings yet
- PDF PDFDocument10 pagesPDF PDFAvishka ChanukaNo ratings yet
- Process Industry Practices PipingDocument5 pagesProcess Industry Practices Pipingabdo samadNo ratings yet
- Bao Gia Ebara Italy NS 1-6-2014 Sao VietDocument6 pagesBao Gia Ebara Italy NS 1-6-2014 Sao Vietjackyt09No ratings yet
- Pain Assessment in PediatricDocument4 pagesPain Assessment in PediatricfitriaNo ratings yet