You might also like
- My Revision Notes Ocr A Level Computer Science Second Edition (George Rouse, Jason Pitt, Sean OByrne) (Z-Library)Document227 pagesMy Revision Notes Ocr A Level Computer Science Second Edition (George Rouse, Jason Pitt, Sean OByrne) (Z-Library)trishan759No ratings yet
- Computer Processing of Remotely-Sensed Images: An IntroductionFrom EverandComputer Processing of Remotely-Sensed Images: An IntroductionNo ratings yet
- (2009, NIPS, Wright Et Al) Robust Principal Component Analysis - Exact Recovery of Corrupted Low-Rank Matrices by Convex OptimizationDocument9 pages(2009, NIPS, Wright Et Al) Robust Principal Component Analysis - Exact Recovery of Corrupted Low-Rank Matrices by Convex OptimizationlarareNo ratings yet
- Remezr2 ArxivDocument30 pagesRemezr2 ArxivFlorinNo ratings yet
- EM Algorithms For PCA and SPCADocument7 pagesEM Algorithms For PCA and SPCAMohamad NasrNo ratings yet
- Sipij 030609Document16 pagesSipij 030609sipijNo ratings yet
- A New Method D of Multi Dimensiona Al ScalingDocument6 pagesA New Method D of Multi Dimensiona Al Scalingpis147879No ratings yet
- Feature Selection For Nonlinear Kernel Support Vector MachinesDocument6 pagesFeature Selection For Nonlinear Kernel Support Vector MachinesSelly Anastassia Amellia KharisNo ratings yet
- A New Face Recognition Method Using PCA, LDA and Neural NetworkDocument6 pagesA New Face Recognition Method Using PCA, LDA and Neural NetworkSujith KumarNo ratings yet
- Fault Diagnosis of Spacecraft Reaction Wheels Based On Principal Component AnalysisDocument6 pagesFault Diagnosis of Spacecraft Reaction Wheels Based On Principal Component AnalysisOthman NasriNo ratings yet
- Denoising of Natural Images Based On Compressive Sensing: Chege SimonDocument16 pagesDenoising of Natural Images Based On Compressive Sensing: Chege SimonIAEME PublicationNo ratings yet
- Qualitative Obstacle Detection: Conference PaperDocument7 pagesQualitative Obstacle Detection: Conference PaperDereckNo ratings yet
- dm10 061 AcareDocument12 pagesdm10 061 AcareElida FeifaNo ratings yet
- MapDocument5 pagesMapMarc AsenjoNo ratings yet
- Uncertainty Analysis For Optimum Plane Extraction From Noisy 3D Range-Sensor Point-CloudsDocument14 pagesUncertainty Analysis For Optimum Plane Extraction From Noisy 3D Range-Sensor Point-CloudsIan MedeirosNo ratings yet
- 1 s2.0 S0951832022006299 MainDocument13 pages1 s2.0 S0951832022006299 MainNurtajNo ratings yet
- Probabilistic Feature Selection and Classification Vector MachineDocument27 pagesProbabilistic Feature Selection and Classification Vector Machinenandini bubNo ratings yet
- Uncertainty Evaluation in Reservoir Forecasting by Bayes Linear MethodologyDocument10 pagesUncertainty Evaluation in Reservoir Forecasting by Bayes Linear MethodologyrezaNo ratings yet
- Approximation Models in Optimization Functions: Alan D Iaz Manr IquezDocument25 pagesApproximation Models in Optimization Functions: Alan D Iaz Manr IquezAlan DíazNo ratings yet
- Matrix Completion From Power-Law Distributed Samples: Raghu Meka, Prateek Jain, and Inderjit S. DhillonDocument9 pagesMatrix Completion From Power-Law Distributed Samples: Raghu Meka, Prateek Jain, and Inderjit S. DhillonmachinelearnerNo ratings yet
- 2008 Williams2008 Article CATSGPSCoordinateTimeSeriesAnaysisDocument7 pages2008 Williams2008 Article CATSGPSCoordinateTimeSeriesAnaysisOsman SerdarNo ratings yet
- A Practical Approximation Algorithm For The LMS Line EstimatorDocument26 pagesA Practical Approximation Algorithm For The LMS Line Estimatorwocow86903No ratings yet
- 6415 Ijdps 01Document13 pages6415 Ijdps 01ijdpsNo ratings yet
- Face Feature Extraction For Recognition Using Radon TransformDocument6 pagesFace Feature Extraction For Recognition Using Radon TransformAJER JOURNALNo ratings yet
- Análisis de La Optimización de Los Algoritmos de Identificación de SistemasDocument9 pagesAnálisis de La Optimización de Los Algoritmos de Identificación de SistemaslunaticokrakenNo ratings yet
- Geophysical J Int - 2002 - Smirnov - Magnetotelluric Data Processing With A Robust Statistical Procedure Having A HighDocument7 pagesGeophysical J Int - 2002 - Smirnov - Magnetotelluric Data Processing With A Robust Statistical Procedure Having A HighAnil Kumar HembramNo ratings yet
- Sample Final SolDocument7 pagesSample Final SolAnshulNo ratings yet
- An Intelligent Method For Accelerating The Convergence of Different Versions of SGMRES AlgorithmDocument13 pagesAn Intelligent Method For Accelerating The Convergence of Different Versions of SGMRES Algorithmacii journalNo ratings yet
- DCA TutorialDocument10 pagesDCA TutorialdeltochilumNo ratings yet
- Christophe Andrieu - Arnaud Doucet Bristol, BS8 1TW, UK. Cambridge, CB2 1PZ, UK. EmailDocument4 pagesChristophe Andrieu - Arnaud Doucet Bristol, BS8 1TW, UK. Cambridge, CB2 1PZ, UK. EmailNeil John AppsNo ratings yet
- Advanced Signal Processing Techniques For Wireless CommunicationsDocument43 pagesAdvanced Signal Processing Techniques For Wireless CommunicationsShobha ShakyaNo ratings yet
- Vanishing Point Detection WACV2017Document9 pagesVanishing Point Detection WACV2017g364445623No ratings yet
- Spectral Methods Meet EM A Provably Optimal Algorithm For CrowdsourcingDocument9 pagesSpectral Methods Meet EM A Provably Optimal Algorithm For Crowdsourcingmorteza hosseiniNo ratings yet
- Applications of Numerical Methods in Civil EngineeringDocument9 pagesApplications of Numerical Methods in Civil EngineeringAsniah M. RatabanNo ratings yet
- Estimation of Parameters of Lomax Distribution by Using Maximum Product Spacings MethodDocument9 pagesEstimation of Parameters of Lomax Distribution by Using Maximum Product Spacings MethodIJRASETPublicationsNo ratings yet
- Random Matrix TheoryDocument65 pagesRandom Matrix TheoryHaider AlSabbaghNo ratings yet
- International Refereed Journal of Engineering and Science (IRJES)Document8 pagesInternational Refereed Journal of Engineering and Science (IRJES)www.irjes.comNo ratings yet
- Charting A Manifold: Mitsubishi Electric Information Technology Center America, 2003Document10 pagesCharting A Manifold: Mitsubishi Electric Information Technology Center America, 2003vijayjohndundeeNo ratings yet
- LSRN A Parallel Iterative Solver For STRDocument19 pagesLSRN A Parallel Iterative Solver For STRBexultan MustafinNo ratings yet
- Annotated 3Document5 pagesAnnotated 3Mea AeNo ratings yet
- Ms Complex Computation Vis 2007Document8 pagesMs Complex Computation Vis 2007Neil HandaNo ratings yet
- 3 - Feature ExtractionDocument22 pages3 - Feature Extractionरितेश व्यासNo ratings yet
- Karthik Nambiar 60009220193Document9 pagesKarthik Nambiar 60009220193knambiardjsNo ratings yet
- ML Estimation of Covariance Matrix For Tensor Valued Signals in NoiseDocument4 pagesML Estimation of Covariance Matrix For Tensor Valued Signals in NoiseIsaiah SunNo ratings yet
- Region Covariance: A Fast Descriptor For Detection and ClassificationDocument12 pagesRegion Covariance: A Fast Descriptor For Detection and ClassificationRashad NoureddineNo ratings yet
- LFD 2005 Nearest NeighbourDocument6 pagesLFD 2005 Nearest NeighbourAnahi SánchezNo ratings yet
- 2013gecco AcoDocument2 pages2013gecco AcoSrijan SehgalNo ratings yet
- A Sparse Matrix Approach To Reverse Mode AutomaticDocument10 pagesA Sparse Matrix Approach To Reverse Mode Automaticgorot1No ratings yet
- The Sample Average Approximation Method Applied To Stochastic Routing Problems A Computational StudyDocument45 pagesThe Sample Average Approximation Method Applied To Stochastic Routing Problems A Computational StudyJianli ShiNo ratings yet
- Bad GeometryDocument5 pagesBad GeometryMilica PopovicNo ratings yet
- NeurIPS 2020 Debiasing Distributed Second Order Optimization With Surrogate Sketching and Scaled Regularization PaperDocument12 pagesNeurIPS 2020 Debiasing Distributed Second Order Optimization With Surrogate Sketching and Scaled Regularization PaperRichard CorneliusNo ratings yet
- Sparse Concept Coding For Visual AnalysisDocument6 pagesSparse Concept Coding For Visual AnalysisgalaxystarNo ratings yet
- Modified Moment Estimation For A Two Parameter Gamma DistributionDocument9 pagesModified Moment Estimation For A Two Parameter Gamma DistributionInternational Organization of Scientific Research (IOSR)No ratings yet
- Ann Trans 2005Document8 pagesAnn Trans 2005BibodiNo ratings yet
- Clustering and Feature Selection Using Sparse Principal Component AnalysisDocument13 pagesClustering and Feature Selection Using Sparse Principal Component AnalysisPavithra MasiNo ratings yet
- Predicting Hourly Rainfall Using Data From Polarimetric RadarsDocument6 pagesPredicting Hourly Rainfall Using Data From Polarimetric RadarsAnkita RanaNo ratings yet
- Sail Mast ReportDocument6 pagesSail Mast ReportMax KondrathNo ratings yet
- Two-Dimensional Laplacianfaces Method For Face RecognitionDocument7 pagesTwo-Dimensional Laplacianfaces Method For Face RecognitionKeerti Kumar KorlapatiNo ratings yet
- Deterministic Batch ANNDocument21 pagesDeterministic Batch ANNvejifon253No ratings yet
- Close & Open Loop SystemDocument6 pagesClose & Open Loop SystemAdonis NicolasNo ratings yet
- Complex Weak Values in Quantum MeasurementDocument3 pagesComplex Weak Values in Quantum MeasurementsankhaNo ratings yet
- BMSP Questions From 4 To 8 ChapterDocument3 pagesBMSP Questions From 4 To 8 ChapterDeepak GowdaNo ratings yet
- CollectionDocument4 pagesCollectionPrincely Royan PhilipNo ratings yet
- Recurrent Neural NetworksDocument20 pagesRecurrent Neural NetworksSharvari GundawarNo ratings yet
- Numerical Methods Formula SheetDocument1 pageNumerical Methods Formula Sheetfake7083100% (1)
- Kelompok 3 - Sheet 3Document6 pagesKelompok 3 - Sheet 3Satrya Budi PratamaNo ratings yet
- Electrical Engineering - Industrial Instrumentation and ControlDocument102 pagesElectrical Engineering - Industrial Instrumentation and ControlTrustWorthy100No ratings yet
- Data Structure Notes Part2 CsegyanDocument13 pagesData Structure Notes Part2 CsegyanDevesh SaxenaNo ratings yet
- Unbound SolutionDocument8 pagesUnbound SolutionStar ClickNo ratings yet
- Matlab Fundamental 12Document11 pagesMatlab Fundamental 12duc anhNo ratings yet
- 1697mining Web Graphs For RecommendationsDocument12 pages1697mining Web Graphs For RecommendationsPurushothama ReddyNo ratings yet
- Lagrange2 NokeyDocument2 pagesLagrange2 NokeyAdityaNo ratings yet
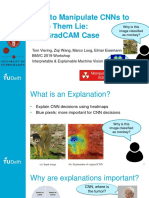
- How To Manipulate CNNs To Make Them Lie: The GradCAM Case (Slides)Document23 pagesHow To Manipulate CNNs To Make Them Lie: The GradCAM Case (Slides)Tom VieringNo ratings yet
- A Machine Learning Based Framework For A Stage-Wise Classification of Date Palm White Scale DiseaseDocument10 pagesA Machine Learning Based Framework For A Stage-Wise Classification of Date Palm White Scale Diseasesafae afNo ratings yet
- Section N Notes With AnswersDocument4 pagesSection N Notes With AnswersDeivid William TorresNo ratings yet
- Answer Sheet Group Number: - 6 - Names of Team Members: - Hongru Bi, Yangxi Gan, Tara Kelley, Jie Xu Data Set - Arlhomes1Document6 pagesAnswer Sheet Group Number: - 6 - Names of Team Members: - Hongru Bi, Yangxi Gan, Tara Kelley, Jie Xu Data Set - Arlhomes1Jie XuNo ratings yet
- Chapter 7 - Branch and BoundDocument16 pagesChapter 7 - Branch and BoundDhruv KhuranaNo ratings yet
- 19Nh14 102190051 Lab13 Chương Trình MapReduce Shortest Path Using Parallel Breadth First Search BFS 02Document16 pages19Nh14 102190051 Lab13 Chương Trình MapReduce Shortest Path Using Parallel Breadth First Search BFS 02Tri An NguyễnNo ratings yet
- 4' - FDM - ExamplesDocument24 pages4' - FDM - ExamplesHasnain MurtazaNo ratings yet
- Exercises (Statistical Analysis of Experimental Data)Document2 pagesExercises (Statistical Analysis of Experimental Data)hafizafizalNo ratings yet
- SJB Institute of Technology: Module - 2 Symmetric CiphersDocument67 pagesSJB Institute of Technology: Module - 2 Symmetric Cipherssasindhur rNo ratings yet
- W7GSDocument10 pagesW7GSHariharan BalasubramanianNo ratings yet
- Signals and Systems Using Matlab Chapter 8 - Sampling TheoryDocument14 pagesSignals and Systems Using Matlab Chapter 8 - Sampling TheoryDiluNo ratings yet
- DAA Lab ManualDocument49 pagesDAA Lab ManualsammmNo ratings yet
- 5.chapter-5 Numerical Methods QuestionsDocument30 pages5.chapter-5 Numerical Methods QuestionsFaizan HaarisNo ratings yet
- Revised TUPLE in PythonDocument40 pagesRevised TUPLE in PythonTech ArmyNo ratings yet
- 9A04802 Digital Image Processing4Document4 pages9A04802 Digital Image Processing4subbuNo ratings yet
- Practical - 9Document6 pagesPractical - 9ankitaNo ratings yet