You might also like
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningFrom EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningNo ratings yet
- Estimation of Liquid-Liquid Equilibrium For A Quaternary System Using The GMDH AlgorithmDocument6 pagesEstimation of Liquid-Liquid Equilibrium For A Quaternary System Using The GMDH AlgorithmLaiadhi DjemouiNo ratings yet
- Radial Basis Networks: Fundamentals and Applications for The Activation Functions of Artificial Neural NetworksFrom EverandRadial Basis Networks: Fundamentals and Applications for The Activation Functions of Artificial Neural NetworksNo ratings yet
- KMurphy PDFDocument20 pagesKMurphy PDFHamid FarhanNo ratings yet
- Joint Modelling Package for Multiple Imputation of Multilevel DataDocument24 pagesJoint Modelling Package for Multiple Imputation of Multilevel DataTyan OrizaNo ratings yet
- Genetic algorithm solves nonlinear parameter estimation problemsDocument9 pagesGenetic algorithm solves nonlinear parameter estimation problemsJack IbrahimNo ratings yet
- Implicit Regularization For Deep Neural Networks Driven by An Ornstein-Uhlenbeck Like ProcessDocument31 pagesImplicit Regularization For Deep Neural Networks Driven by An Ornstein-Uhlenbeck Like ProcessNathalia SantosNo ratings yet
- Semi-supervised learning with normalizing flowsDocument16 pagesSemi-supervised learning with normalizing flowsPalle JayanthNo ratings yet
- pp9 - v4 - MejoradoDocument6 pagespp9 - v4 - Mejoradoapi-3734323No ratings yet
- A Relational Approach To The Compilation of Sparse Matrix ProgramsDocument16 pagesA Relational Approach To The Compilation of Sparse Matrix Programsmmmmm1900No ratings yet
- Relational Approach to Compiling Sparse Matrix CodeDocument16 pagesRelational Approach to Compiling Sparse Matrix Codemmmmm1900No ratings yet
- CLM ArticleDocument40 pagesCLM Articlerico.caballero7No ratings yet
- Large Margin Deep Networks For ClassificationDocument16 pagesLarge Margin Deep Networks For ClassificationShah Nawaz KhanNo ratings yet
- Automatic Database Normalization and Primary Key GenerationDocument6 pagesAutomatic Database Normalization and Primary Key GenerationRohit DoriyaNo ratings yet
- Gradient Estimation Using Stochastic Computation GraphsDocument13 pagesGradient Estimation Using Stochastic Computation Graphsstephane VernedeNo ratings yet
- General Graph Optimization Framework for Robotics and Computer Vision ProblemsDocument7 pagesGeneral Graph Optimization Framework for Robotics and Computer Vision ProblemsSidharth SharmaNo ratings yet
- Week - 5 (Deep Learning) Q. 1) Explain The Architecture of Feed Forward Neural Network or Multilayer Perceptron. (12 Marks)Document7 pagesWeek - 5 (Deep Learning) Q. 1) Explain The Architecture of Feed Forward Neural Network or Multilayer Perceptron. (12 Marks)Mrunal BhilareNo ratings yet
- GPS Data Processing Methodology from Theory to ApplicationsDocument37 pagesGPS Data Processing Methodology from Theory to ApplicationsnicefamiliarNo ratings yet
- CS 3035 (ML) - CS - End - May - 2023Document11 pagesCS 3035 (ML) - CS - End - May - 2023Rachit SrivastavNo ratings yet
- Glow: Generative Flow With Invertible 1×1 Convolutions: Equal ContributionDocument15 pagesGlow: Generative Flow With Invertible 1×1 Convolutions: Equal ContributionNguyễn ViệtNo ratings yet
- Lecture 2: Introduction To PytorchDocument7 pagesLecture 2: Introduction To PytorchNilesh ChaudharyNo ratings yet
- Analysis For Graph Based SLAM Algorithms Under G2o FrameworkDocument11 pagesAnalysis For Graph Based SLAM Algorithms Under G2o FrameworkTruong Trong TinNo ratings yet
- Bayesian Analysis of Spatially Autocorrelated Data Spatial Data Analysis in Ecology and Agriculture Using RDocument18 pagesBayesian Analysis of Spatially Autocorrelated Data Spatial Data Analysis in Ecology and Agriculture Using Raletheia_aiehtelaNo ratings yet
- Automatic Reparameterisation of Probabilistic ProgramsDocument10 pagesAutomatic Reparameterisation of Probabilistic ProgramsdperepolkinNo ratings yet
- The Good BookDocument10 pagesThe Good BookGeet SharmaNo ratings yet
- Generalizing Mlps With Dropouts, Batch Normalization, and Skip ConnectionsDocument10 pagesGeneralizing Mlps With Dropouts, Batch Normalization, and Skip ConnectionsAnil Kumar BNo ratings yet
- Composite Key Generation On A Shared NotDocument16 pagesComposite Key Generation On A Shared NotHala MADRIDNo ratings yet
- Wavelets On Graphs Via Spectral Graph TheoryDocument37 pagesWavelets On Graphs Via Spectral Graph Theory孔翔鸿No ratings yet
- Gradient Descent AlgorithmDocument5 pagesGradient Descent AlgorithmravinyseNo ratings yet
- Linear Regression Simple Technique For IDocument3 pagesLinear Regression Simple Technique For IbAxTErNo ratings yet
- VGAM Package for Categorical Data AnalysisDocument30 pagesVGAM Package for Categorical Data AnalysisGilberto Martinez BuitragoNo ratings yet
- tutorial-MART and R InterfaceDocument24 pagestutorial-MART and R InterfaceaarivalaganNo ratings yet
- Final Thesis Pk12Document97 pagesFinal Thesis Pk12Suman PradhanNo ratings yet
- Generalization of Rischs Algorithm To Special Functions PDFDocument19 pagesGeneralization of Rischs Algorithm To Special Functions PDFJuan Pastor RamosNo ratings yet
- Over-parameterized systems satisfy PL* condition ensuring SGD convergenceDocument31 pagesOver-parameterized systems satisfy PL* condition ensuring SGD convergenceLuis BoteNo ratings yet
- Laude 2018 Discrete ContinuousDocument13 pagesLaude 2018 Discrete ContinuousswagmanswagNo ratings yet
- Homework Exercise 4: Statistical Learning, Fall 2020-21Document3 pagesHomework Exercise 4: Statistical Learning, Fall 2020-21Elinor RahamimNo ratings yet
- A Probabilistic Theory of Deep Learning: Unit 2Document17 pagesA Probabilistic Theory of Deep Learning: Unit 2HarshitNo ratings yet
- Fast Label Embeddings via Randomized Linear AlgebraDocument15 pagesFast Label Embeddings via Randomized Linear Algebraomonait17No ratings yet
- Optimization MathematicsDocument9 pagesOptimization MathematicsKrishna AcharyaNo ratings yet
- Escape Analysis For JavaDocument19 pagesEscape Analysis For JavapostscriptNo ratings yet
- Sympy: Definite Integration Via Integration in The Complex Plane ProposalDocument3 pagesSympy: Definite Integration Via Integration in The Complex Plane Proposalrizgarmella100% (1)
- Random Sets Approach and Its ApplicationsDocument12 pagesRandom Sets Approach and Its ApplicationsThuy MyNo ratings yet
- Gji 149 3 625Document8 pagesGji 149 3 625Diiana WhiteleyNo ratings yet
- Deep Learning AnswersDocument36 pagesDeep Learning AnswersmrunalNo ratings yet
- Adaptive DEDocument6 pagesAdaptive DEHafizNo ratings yet
- Marginalized Denoising Auto-Encoders For Nonlinear RepresentationsDocument9 pagesMarginalized Denoising Auto-Encoders For Nonlinear RepresentationsAli Hassan MirzaNo ratings yet
- Sigmoid Function: Soft Computing AssignmentDocument12 pagesSigmoid Function: Soft Computing AssignmentOMSAINATH MPONLINE100% (1)
- S - T N: B O H - S B - R F: ELF Uning Etworks Ilevel Ptimization of Yperparameters Us ING Tructured EST Esponse UnctionsDocument25 pagesS - T N: B O H - S B - R F: ELF Uning Etworks Ilevel Ptimization of Yperparameters Us ING Tructured EST Esponse UnctionsTran Ngoc ThangNo ratings yet
- Data Analysis Process of Working Hydraulics of Small Mobile MachineDocument10 pagesData Analysis Process of Working Hydraulics of Small Mobile Machineyusufhussein431No ratings yet
- DL Unit1Document10 pagesDL Unit1Ankit MahapatraNo ratings yet
- Deep-Learning Notes 01Document8 pagesDeep-Learning Notes 01Ankit MahapatraNo ratings yet
- Important QuestionsDocument18 pagesImportant Questionsshouryarastogi9760No ratings yet
- Fluid99 PDFDocument11 pagesFluid99 PDFWilfried BarrosNo ratings yet
- A: A M S O: DAM Ethod For Tochastic PtimizationDocument13 pagesA: A M S O: DAM Ethod For Tochastic PtimizationAhmad KarlamNo ratings yet
- Nelder 1972Document16 pagesNelder 19720hitk0No ratings yet
- PerceptiLabs-ML HandbookDocument31 pagesPerceptiLabs-ML Handbookfx0neNo ratings yet
- Design of Transparent Mamdani Fuzzy Inference SystemsDocument9 pagesDesign of Transparent Mamdani Fuzzy Inference SystemsTamás OlléNo ratings yet
- Graphical Algorithms and Mining - Network Structural Vocabulary 2017Document26 pagesGraphical Algorithms and Mining - Network Structural Vocabulary 2017lakshmi.vnNo ratings yet
- Brazilian neural network conference proceedings on immunological RBF network initializationDocument6 pagesBrazilian neural network conference proceedings on immunological RBF network initializationTéoTavaresNo ratings yet
- Summarizing Data & Statistics: Reminder For Final ExamDocument10 pagesSummarizing Data & Statistics: Reminder For Final ExamJoseph QuesnelNo ratings yet
- ASSIGNMENT Basic StatisticsDocument2 pagesASSIGNMENT Basic StatisticsVijay BainsNo ratings yet
- A Handbook of Communication ResearchDocument70 pagesA Handbook of Communication ResearchJohana VangchhiaNo ratings yet
- P L Lohitha 11-11-22 Data Mining Business ReportDocument47 pagesP L Lohitha 11-11-22 Data Mining Business ReportLohitha PakalapatiNo ratings yet
- Applied Regression Analysis Final ProjectDocument8 pagesApplied Regression Analysis Final Projectbqa5055No ratings yet
- Assignment 2 QuestionDocument4 pagesAssignment 2 QuestionYanaAlihadNo ratings yet
- Moving Average Method Forecasting TechniquesDocument17 pagesMoving Average Method Forecasting TechniquesMahnoor KhalidNo ratings yet
- Regression Analysis ExplainedDocument111 pagesRegression Analysis ExplainedNicole Agustin100% (1)
- Practical Research 2Document44 pagesPractical Research 2Jeclyn FilipinasNo ratings yet
- MCA Exam Questions on Data Mining & WarehousingDocument3 pagesMCA Exam Questions on Data Mining & WarehousingMsec McaNo ratings yet
- Erbacher Vita 2010Document5 pagesErbacher Vita 2010HuntMNo ratings yet
- Intermediate Statistics Sample Test 1Document17 pagesIntermediate Statistics Sample Test 1muralidharan0% (3)
- Chapter Three Research MethodologyDocument5 pagesChapter Three Research MethodologyPatriqKaruriKimboNo ratings yet
- ETHIOPIADocument13 pagesETHIOPIANadanNadhifahNo ratings yet
- Research PresentationDocument22 pagesResearch PresentationeferemNo ratings yet
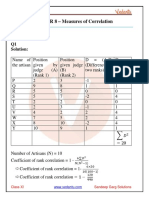
- Sandeep Garg Economics Class 11 Solutions For Chapter 8 - Measures of CorrelationDocument5 pagesSandeep Garg Economics Class 11 Solutions For Chapter 8 - Measures of CorrelationRiddhiman JainNo ratings yet
- Knowledge Discovery in Data Science: KDD Meets Big DataDocument6 pagesKnowledge Discovery in Data Science: KDD Meets Big DataPatricio UlloaNo ratings yet
- Analysis Vs ReportingDocument21 pagesAnalysis Vs Reportingselva rajNo ratings yet
- MasterThesis UniliverDocument76 pagesMasterThesis UniliverVita SonyaNo ratings yet
- Introduction To Correlationand Regression Analysis BY Farzad Javidanrad PDFDocument52 pagesIntroduction To Correlationand Regression Analysis BY Farzad Javidanrad PDFgulafshanNo ratings yet
- Chapter 4 - Forecasting: Mr. David P. Blain. C.Q.E. Management Department UnlvDocument34 pagesChapter 4 - Forecasting: Mr. David P. Blain. C.Q.E. Management Department UnlvPrerna Aggarwal0% (1)
- Time Series Method-Free Hand, Semi Average, Moving Average-Unit-4Document94 pagesTime Series Method-Free Hand, Semi Average, Moving Average-Unit-4Sachin KirolaNo ratings yet
- Hiring Process Analytics Project 4 On StatisticsDocument6 pagesHiring Process Analytics Project 4 On StatisticsNiraj Ingole100% (1)
- Guidebook For Six Sigma Implementation With Real Time ApplicationsDocument5 pagesGuidebook For Six Sigma Implementation With Real Time ApplicationsAyan GhoshNo ratings yet
- Statistics-for-Engineering-and-the-Sciences-Sixth-Edition - ESI 5219 PDFDocument1,170 pagesStatistics-for-Engineering-and-the-Sciences-Sixth-Edition - ESI 5219 PDFAnh H. Dinh100% (2)
- Processing of Data, MBA-II SemDocument3 pagesProcessing of Data, MBA-II SemDarshan NallodeNo ratings yet
- Chapter 14 Fixed Effects Regressions Least Square Dummy Variable Approach (EC220)Document26 pagesChapter 14 Fixed Effects Regressions Least Square Dummy Variable Approach (EC220)SafinaMandokhailNo ratings yet
- Educational Data Mining For The Analysis of Student DesertionDocument11 pagesEducational Data Mining For The Analysis of Student DesertionpadatreNo ratings yet
- MATLAB Econometric Model ForecastingDocument10 pagesMATLAB Econometric Model ForecastingOmiNo ratings yet
- LPG Marketing Analysis Using Descriptive StatisticsDocument6 pagesLPG Marketing Analysis Using Descriptive StatisticsSushama SinghNo ratings yet