You might also like
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- H00002007-HexagonMI-RDS User Manual-V5.4.1.202 enDocument216 pagesH00002007-HexagonMI-RDS User Manual-V5.4.1.202 enNosfe Matingli Diaz100% (1)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Configuración Basica de Un Router CiscoDocument26 pagesConfiguración Basica de Un Router CiscojpgonzalezalvarezNo ratings yet
- Systems of Equations Lesson 5Document46 pagesSystems of Equations Lesson 5Rmel VergaraNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- 10 Ga 7 Codelco AutomatizacionDocument25 pages10 Ga 7 Codelco AutomatizacionGiulianoHuertaShandersonNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5808)
- Mapa Seis Sigma DmaicDocument6 pagesMapa Seis Sigma DmaicTyler Henderson100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (843)
- MS Word PDFDocument84 pagesMS Word PDFRaianeNo ratings yet
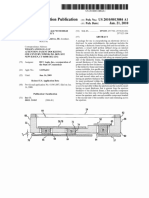
- Us20100013084a1 - Surface Mount Package With High Thermal ConductivityDocument13 pagesUs20100013084a1 - Surface Mount Package With High Thermal ConductivityNosfe Matingli DiazNo ratings yet
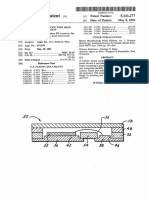
- Us5111277 - Surface Mount Device With High Thermal ConductivityDocument7 pagesUs5111277 - Surface Mount Device With High Thermal ConductivityNosfe Matingli DiazNo ratings yet
- Us6111198 - Duplex Feedthrough and Method ThereforDocument9 pagesUs6111198 - Duplex Feedthrough and Method ThereforNosfe Matingli DiazNo ratings yet
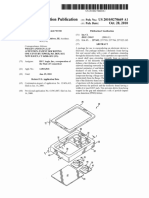
- Us20100270669a1 - Surface Mount Package With Ceramic SidewallsDocument13 pagesUs20100270669a1 - Surface Mount Package With Ceramic SidewallsNosfe Matingli DiazNo ratings yet
- Surface Roughness Conversion2Document1 pageSurface Roughness Conversion2Nosfe Matingli DiazNo ratings yet
- Energy Conversion-Based Nanotherapy For Rheumatoid Arthritis TreatmentDocument16 pagesEnergy Conversion-Based Nanotherapy For Rheumatoid Arthritis TreatmentNosfe Matingli DiazNo ratings yet
- RDS Data Collector: User ManualDocument149 pagesRDS Data Collector: User ManualNosfe Matingli DiazNo ratings yet
- Awcb 178 NfdatasheetDocument18 pagesAwcb 178 NfdatasheetNosfe Matingli DiazNo ratings yet
- Pc-Dmis 2017 r1 NistDocument5 pagesPc-Dmis 2017 r1 NistNosfe Matingli DiazNo ratings yet
- Surface Roughness ConversionDocument1 pageSurface Roughness ConversionNosfe Matingli DiazNo ratings yet
- Asit Kumar Sanyal 2016 13Document536 pagesAsit Kumar Sanyal 2016 13Nosfe Matingli DiazNo ratings yet
- FARO TechDocument7 pagesFARO TechNosfe Matingli DiazNo ratings yet
- Asit Kumar Sanyal 2016 13Document536 pagesAsit Kumar Sanyal 2016 13Nosfe Matingli DiazNo ratings yet
- Farzad Jahanbani 2016 45Document80 pagesFarzad Jahanbani 2016 45Nosfe Matingli DiazNo ratings yet
- Engineering Information: Spur Gears Gear NomenclatureDocument18 pagesEngineering Information: Spur Gears Gear NomenclatureShamologNo ratings yet
- Mtemi Dedan - Poems - : Poetry SeriesDocument35 pagesMtemi Dedan - Poems - : Poetry SeriesNosfe Matingli DiazNo ratings yet
- Gear Guide PDFDocument89 pagesGear Guide PDFDicedudeNo ratings yet
- David Lacey 2016 23Document726 pagesDavid Lacey 2016 23Nosfe Matingli DiazNo ratings yet
- Warren Falcon 2016 35Document903 pagesWarren Falcon 2016 35Nosfe Matingli DiazNo ratings yet
- Procedimiento Encendido de MaquinaDocument1 pageProcedimiento Encendido de MaquinaNosfe Matingli DiazNo ratings yet
- Govinda Rimal 2016 4Document10 pagesGovinda Rimal 2016 4Nosfe Matingli DiazNo ratings yet
- Christian Lacdael 2016 35Document165 pagesChristian Lacdael 2016 35Nosfe Matingli DiazNo ratings yet
- Tersa ComentariosDocument2 pagesTersa ComentariosNosfe Matingli DiazNo ratings yet
- LogDocument2 pagesLoghnur72894No ratings yet
- IT QuestionsDocument108 pagesIT QuestionsDeepika MittalNo ratings yet
- Moxa Arm Based Computer Linux User Manual For Debian 9 v4.2Document74 pagesMoxa Arm Based Computer Linux User Manual For Debian 9 v4.2David AltuveNo ratings yet
- COD PAE V100crescens - NetxxDocument21 pagesCOD PAE V100crescens - NetxxVitor S.No ratings yet
- IBM V7000 SAN Storage: Thin Provisioned vs. Fully AllocatedDocument70 pagesIBM V7000 SAN Storage: Thin Provisioned vs. Fully Allocatedjack_garcia-7ox3sfccNo ratings yet
- Ananay Arora: EducationDocument1 pageAnanay Arora: EducationvasuNo ratings yet
- Estadística Descriptiva EnfermeríaDocument10 pagesEstadística Descriptiva EnfermeríaAndy Leonel Zuñiga TorresNo ratings yet
- ATICA2013Document414 pagesATICA2013Alma De Los Ángeles Cruz JuárezNo ratings yet
- Fix UEFI Boot - Fix For Windows 7, 8, 8.1, 10Document17 pagesFix UEFI Boot - Fix For Windows 7, 8, 8.1, 10FeteneNo ratings yet
- Convierte Tu Aplicación de React en PWADocument9 pagesConvierte Tu Aplicación de React en PWALuis Fernando ZeaNo ratings yet
- Segundo MóduloDocument9 pagesSegundo MóduloAMER Concepción HuistaNo ratings yet
- 02 - PBI DaxDocument37 pages02 - PBI DaxPaula InesNo ratings yet
- Smart CityDocument6 pagesSmart CityMuhammad Zaid MehmoodNo ratings yet
- Tef Calculator Walk ThroughDocument17 pagesTef Calculator Walk ThroughCapitus L. L. PNo ratings yet
- Garmin - Product Compare - 2024Document13 pagesGarmin - Product Compare - 2024AUGUSTO TUDELANo ratings yet
- Computer by Yatendra Sir: MemoryDocument7 pagesComputer by Yatendra Sir: Memoryparassh knowledgeNo ratings yet
- Oracle® Fusion Middleware: Installation Guide For Oracle Jdeveloper 11G Release 1 (11.1.1)Document24 pagesOracle® Fusion Middleware: Installation Guide For Oracle Jdeveloper 11G Release 1 (11.1.1)GerardoNo ratings yet
- Como Desactivar Deep FreezeDocument3 pagesComo Desactivar Deep FreezeDianita Carolina VillarroelNo ratings yet
- Leitz Reference Xe Brochure enDocument12 pagesLeitz Reference Xe Brochure entheflamebearerNo ratings yet
- FortiGate 1500D Datasheet PDFDocument6 pagesFortiGate 1500D Datasheet PDFDautuso4.0No ratings yet
- Procesador de Textos - Act1Document10 pagesProcesador de Textos - Act1Carolina SchnyderNo ratings yet
- Macro para Enviar Conteúdo de Célula Do Excel Por E-Mail - Excelmax Soluções, Excel, Software, Simulador, Gráfico, Macro, VBADocument3 pagesMacro para Enviar Conteúdo de Célula Do Excel Por E-Mail - Excelmax Soluções, Excel, Software, Simulador, Gráfico, Macro, VBAorangotaNo ratings yet
- Show FilesDocument32 pagesShow FileshmhaidarNo ratings yet
- Symantec Endpoint Protection SBE 12.1 EoL PM-001064Document6 pagesSymantec Endpoint Protection SBE 12.1 EoL PM-001064mtxmomoaudioNo ratings yet
- DS8700 Data SheetDocument8 pagesDS8700 Data SheetJorge CastellanosNo ratings yet