You might also like
- Tracking with Particle Filter for High-dimensional Observation and State SpacesFrom EverandTracking with Particle Filter for High-dimensional Observation and State SpacesNo ratings yet
- Interactive Animation of Cloth Like QualitiesDocument10 pagesInteractive Animation of Cloth Like Qualitiesjmckin_2010No ratings yet
- Dynamic Simulation: Model, Basic Algorithms, and OptimizationDocument15 pagesDynamic Simulation: Model, Basic Algorithms, and OptimizationjadeNo ratings yet
- Real-Time 3-D Human Body Tracking Using Variable Length Markov ModelsDocument10 pagesReal-Time 3-D Human Body Tracking Using Variable Length Markov ModelsCyrille LamasséNo ratings yet
- Natural Animation of Digitized Models from Motion CaptureDocument8 pagesNatural Animation of Digitized Models from Motion CaptureTeófilo Andrade FarfánNo ratings yet
- Cyclic Animation Using Partial Differential EquationsDocument15 pagesCyclic Animation Using Partial Differential EquationsJAY BHAGATNo ratings yet
- Computational Issues in Non-Linear Structural Analysis Using A Physics EngineDocument16 pagesComputational Issues in Non-Linear Structural Analysis Using A Physics EngineAriel Choque DelgadoNo ratings yet
- Optimization-Based Reactive Force Control For Robot Grasping TasksDocument6 pagesOptimization-Based Reactive Force Control For Robot Grasping TasksTheresa NewmanNo ratings yet
- A Multi-State Constraint Kalman FilterDocument8 pagesA Multi-State Constraint Kalman Filteradeelakram03No ratings yet
- The Representation and Recognition of Action Using Temporal TemplatesDocument7 pagesThe Representation and Recognition of Action Using Temporal TemplatesjimakosjpNo ratings yet
- Ijct V3i2p5Document9 pagesIjct V3i2p5IjctJournalsNo ratings yet
- Markerless Motion Capture Using Image Features and Physical ConstraintsDocument8 pagesMarkerless Motion Capture Using Image Features and Physical ConstraintsHany ElGezawyNo ratings yet
- File 1667643029 110340 2001-MarkerlessMotionCaptureofComplexFull-BodyMovementforCharacterAnimationDocument12 pagesFile 1667643029 110340 2001-MarkerlessMotionCaptureofComplexFull-BodyMovementforCharacterAnimationdevansh gargNo ratings yet
- Research Article: Parallel Motion Simulation of Large-Scale Real-Time Crowd in A Hierarchical Environmental ModelDocument16 pagesResearch Article: Parallel Motion Simulation of Large-Scale Real-Time Crowd in A Hierarchical Environmental ModelLars SepeNo ratings yet
- Markerless motion captureDocument8 pagesMarkerless motion captureCyrille LamasséNo ratings yet
- 工程吊車之物理行為模擬 Physics-Based Simulation of Detailed Erection Activities of Construction CranesDocument10 pages工程吊車之物理行為模擬 Physics-Based Simulation of Detailed Erection Activities of Construction CranesDanut CalugarNo ratings yet
- Activity Modeling and Recognition Using Shape Theory: Rama Chellappa, Namrata Vaswani, Amit K.Roy ChowdhuryDocument4 pagesActivity Modeling and Recognition Using Shape Theory: Rama Chellappa, Namrata Vaswani, Amit K.Roy ChowdhuryChanukya Krishna ChamaNo ratings yet
- Kalman 3. Robot PaltillDocument9 pagesKalman 3. Robot PaltillTrung KiênNo ratings yet
- Robotics Science Systems 2018 Real-time Synthesis Accurate Feasible Robot Arm MotionDocument9 pagesRobotics Science Systems 2018 Real-time Synthesis Accurate Feasible Robot Arm MotionnrrdNo ratings yet
- Historia Dle MovimientoDocument11 pagesHistoria Dle MovimientoBryan GarciaNo ratings yet
- Arcade 7ncee Paper 2002 PDFDocument9 pagesArcade 7ncee Paper 2002 PDFMircea Eugen TeodorescuNo ratings yet
- Quadrupedal Robots Whole-Body Motion Control BasedDocument17 pagesQuadrupedal Robots Whole-Body Motion Control BasedluukverstegenNo ratings yet
- DownloadDocument8 pagesDownloadJuan Camilo ParejaNo ratings yet
- Ani Mat inDocument12 pagesAni Mat insajimathiraNo ratings yet
- Keyframe-Based Tracking For Rotoscoping and AnimationDocument8 pagesKeyframe-Based Tracking For Rotoscoping and AnimationnaginatNo ratings yet
- Morphology-Independent Representation of Motions For Interactive Human-Like AnimationDocument11 pagesMorphology-Independent Representation of Motions For Interactive Human-Like AnimationAntoine RennuitNo ratings yet
- Real-Time Tracking of Moving Objects With An Active Camera: K. Daniilidis, C. Krauss, M. Hansen and G. SommerDocument18 pagesReal-Time Tracking of Moving Objects With An Active Camera: K. Daniilidis, C. Krauss, M. Hansen and G. SommerJonathan Neira GonzalezNo ratings yet
- Real-Time Inverse Kinematics Techniques For Anthropomorphic LimbsDocument36 pagesReal-Time Inverse Kinematics Techniques For Anthropomorphic Limbsjbartels2006No ratings yet
- Programming Full-Body Movements For Humanoid Robots by ObservationDocument16 pagesProgramming Full-Body Movements For Humanoid Robots by Observationchandinlove5059No ratings yet
- A Data-Driven Approach For Real-Time Clothes SimulationDocument10 pagesA Data-Driven Approach For Real-Time Clothes SimulationBensonNo ratings yet
- Generic Method To Model Construction CranesDocument7 pagesGeneric Method To Model Construction CranesmaxamaxaNo ratings yet
- Non-Rigid Motion Canceling AlgorithmDocument10 pagesNon-Rigid Motion Canceling Algorithmwalter huNo ratings yet
- Whole-body Motion Planning Building BlocksDocument32 pagesWhole-body Motion Planning Building BlockssteffenspmNo ratings yet
- Multiresolution Green’s Function Methods for Interactive Simulation of Large-Scale Elastostatic ODocument36 pagesMultiresolution Green’s Function Methods for Interactive Simulation of Large-Scale Elastostatic OLuis MarquesNo ratings yet
- AcyclicGait IROS08Document6 pagesAcyclicGait IROS08MARIO RICARDO ARBULU SAAVEDRANo ratings yet
- A Variational Method For The Recovery of Dense 3D Structure From MotionDocument11 pagesA Variational Method For The Recovery of Dense 3D Structure From Motionwalter huNo ratings yet
- Recognizing Actions from Multiple Cameras Using a New Pose-Based RepresentationDocument12 pagesRecognizing Actions from Multiple Cameras Using a New Pose-Based RepresentationhjaraujoNo ratings yet
- Paper ControlDocument8 pagesPaper ControlAndree CrNo ratings yet
- Marker-free motion capture from 3D voxel dataDocument10 pagesMarker-free motion capture from 3D voxel dataCyrille LamasséNo ratings yet
- Inverse Kinematics Positioning Using Nonlinear Programming For Highly Articulated FiguresDocument30 pagesInverse Kinematics Positioning Using Nonlinear Programming For Highly Articulated FiguresbobohelpNo ratings yet
- 2013 9 9 3659 3666Document8 pages2013 9 9 3659 3666sindhu bhargaviNo ratings yet
- Computer Puppetry: An Importance-Based ApproachDocument28 pagesComputer Puppetry: An Importance-Based ApproachSamir HoreNo ratings yet
- Pose Controlled Physically-Based Motion: School of Computer Science and Engineering The Hebrew University of JerusalemDocument11 pagesPose Controlled Physically-Based Motion: School of Computer Science and Engineering The Hebrew University of JerusalemSangameshwar LabhishettyNo ratings yet
- Ship Motion Simulation System Generates Realistic MovementsDocument12 pagesShip Motion Simulation System Generates Realistic MovementsLan Lê Thị NgọcNo ratings yet
- 3D Tracking For Gait Characterization and RecognitionDocument6 pages3D Tracking For Gait Characterization and RecognitionschumangelNo ratings yet
- Human or More Generally Articulated Figure Animations Have Been Seen in A Variety of Application Fields Including AdvertisingDocument6 pagesHuman or More Generally Articulated Figure Animations Have Been Seen in A Variety of Application Fields Including AdvertisingYongKang YKNo ratings yet
- Robust Dense Mapping For Large-Scale Dynamic EnvironmentsDocument8 pagesRobust Dense Mapping For Large-Scale Dynamic EnvironmentsnrrdNo ratings yet
- Grosso E Articolo 1995 ActiveDocument12 pagesGrosso E Articolo 1995 ActiveMaria PaladeNo ratings yet
- Structure DeforDocument8 pagesStructure DeforXavier GuenardNo ratings yet
- Torsten ReilDocument10 pagesTorsten ReilFajar HariadiNo ratings yet
- Interactive Animation of Structured Deformable Objects: Mathieu Desbrun Peter SCHR Oder Alan BarrDocument8 pagesInteractive Animation of Structured Deformable Objects: Mathieu Desbrun Peter SCHR Oder Alan Barrjmckin_2010No ratings yet
- Tracking Oncoming and Turning Vehicles at Intersections: Alexander Barth and Uwe FrankeDocument8 pagesTracking Oncoming and Turning Vehicles at Intersections: Alexander Barth and Uwe Frankeshisasane2No ratings yet
- Kinematics For Multisection Continuum Robots: Bryan A. Jones, Member, IEEE and Ian D. Walker, Fellow, IEEEDocument15 pagesKinematics For Multisection Continuum Robots: Bryan A. Jones, Member, IEEE and Ian D. Walker, Fellow, IEEESamuel Esteban Rodriguez LopezNo ratings yet
- Human Activity Recognition: B.Tech Project ReportDocument11 pagesHuman Activity Recognition: B.Tech Project ReportHunter IxNo ratings yet
- Real-Time Non-Rigid Reconstruction Using An RGB-D CameraDocument12 pagesReal-Time Non-Rigid Reconstruction Using An RGB-D CameraElafanNo ratings yet
- Flexible Model Predictive Control Based On MultivaDocument15 pagesFlexible Model Predictive Control Based On MultivaangelNo ratings yet
- Wlding RobotDocument8 pagesWlding Robotameer hamzaNo ratings yet
- Optimal Image Segmentation and Real-Time TrackingDocument13 pagesOptimal Image Segmentation and Real-Time TrackingVivek KovarthanNo ratings yet
- QuEst - A Quaternion-Based Approach For Camera Motion Estimation From Minimal Feature PointsDocument8 pagesQuEst - A Quaternion-Based Approach For Camera Motion Estimation From Minimal Feature PointsjohnNo ratings yet
- Qualitative Vision-Based Path Following: Zhichao Chen and Stanley T. Birchfield, Senior Member, IEEEDocument6 pagesQualitative Vision-Based Path Following: Zhichao Chen and Stanley T. Birchfield, Senior Member, IEEEJulierme SilvaNo ratings yet
- Integrating JasperReports To PHPDocument10 pagesIntegrating JasperReports To PHPrupinder_3061463No ratings yet
- Lcasean PaperDocument6 pagesLcasean Paperkean ebeoNo ratings yet
- ITC Gardenia LavendreriaDocument6 pagesITC Gardenia LavendreriaMuskan AgarwalNo ratings yet
- Natural Resources Management IntroDocument14 pagesNatural Resources Management IntroJoaquin David Magana100% (2)
- Automotive Plastic Product Design Interview QuestionsDocument13 pagesAutomotive Plastic Product Design Interview QuestionsAbhijith Alolickal100% (2)
- En Subject C08Document13 pagesEn Subject C08jmolfigueiraNo ratings yet
- MAXsys 2510 Meterin FamilyDocument52 pagesMAXsys 2510 Meterin FamilyAbel NinaNo ratings yet
- How To Cook Indian: More Than 500 Classic Recipes For The Modern KitchenDocument431 pagesHow To Cook Indian: More Than 500 Classic Recipes For The Modern Kitchenbingoteam100% (1)
- Ch-4 Stock Markets - OldDocument56 pagesCh-4 Stock Markets - OldYibeltal AssefaNo ratings yet
- Quality Improvement Methodologies - PDCA Cycle RAD PDFDocument9 pagesQuality Improvement Methodologies - PDCA Cycle RAD PDFherita suasantaNo ratings yet
- 18 MN216 Fluid Mechanics IDocument2 pages18 MN216 Fluid Mechanics Ijorge luisNo ratings yet
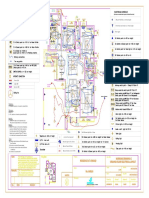
- Varun Valanjeri Electrical Layout-3Document1 pageVarun Valanjeri Electrical Layout-3ANOOP R NAIRNo ratings yet
- Society of Radiographers - PDFDocument9 pagesSociety of Radiographers - PDFOsama AhmedNo ratings yet
- Family Creation WorkflowDocument2 pagesFamily Creation Workflowzax418No ratings yet
- 39.prof. Ketaki Yadav 2 SRJISDocument2 pages39.prof. Ketaki Yadav 2 SRJISAnonymous CwJeBCAXpNo ratings yet
- Birla Institute of Technology and Science, Pilani: Pilani Campus AUGS/ AGSR DivisionDocument5 pagesBirla Institute of Technology and Science, Pilani: Pilani Campus AUGS/ AGSR DivisionDeep PandyaNo ratings yet
- Change Management HRDocument2 pagesChange Management HRahmedaliNo ratings yet
- Nuisance CandidateDocument5 pagesNuisance CandidateMalen AvanceñaNo ratings yet
- Soal Mid Ganjil 14Document4 pagesSoal Mid Ganjil 14Anonymous a2C6YgevfNo ratings yet
- Royalstone ReadmeDocument2 pagesRoyalstone ReadmeAdnan BrianNo ratings yet
- IMU 25,26 Oct 2014 (Other) ResultDocument2,582 pagesIMU 25,26 Oct 2014 (Other) ResultMuhammadFarhanShakee100% (1)
- Sec. Gr. To BT History Temp Panel 2013Document50 pagesSec. Gr. To BT History Temp Panel 2013edwin_prakash75No ratings yet
- Big Data Machine Learning Using Apache Spark Mllib: December 2017Document8 pagesBig Data Machine Learning Using Apache Spark Mllib: December 2017edgarNo ratings yet
- Chapter 3 The Life of Jose Rizal PDFDocument11 pagesChapter 3 The Life of Jose Rizal PDFMelanie CaplayaNo ratings yet
- Use of VariablesDocument5 pagesUse of VariablesJohn Clyde RanchezNo ratings yet
- UntitledDocument421 pagesUntitledtunggal KecerNo ratings yet
- Reading Module 7Document10 pagesReading Module 7lawrencekailNo ratings yet
- Jack Turner - Not On Any MapDocument13 pagesJack Turner - Not On Any MapormrNo ratings yet
- IEC 61850 Configuration of A Phoenix Contact IED: User ManualDocument68 pagesIEC 61850 Configuration of A Phoenix Contact IED: User ManualHarold PuinNo ratings yet
- Revised SCOPE OF WORK and SCCDocument363 pagesRevised SCOPE OF WORK and SCCZia KhanNo ratings yet
- Certified Solidworks Professional Advanced Weldments Exam PreparationFrom EverandCertified Solidworks Professional Advanced Weldments Exam PreparationRating: 5 out of 5 stars5/5 (1)
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)From EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Rating: 5 out of 5 stars5/5 (2)
- SolidWorks 2015 Learn by doing-Part 2 (Surface Design, Mold Tools, and Weldments)From EverandSolidWorks 2015 Learn by doing-Part 2 (Surface Design, Mold Tools, and Weldments)Rating: 4.5 out of 5 stars4.5/5 (5)
- FreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsFrom EverandFreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsRating: 5 out of 5 stars5/5 (1)
- From Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsFrom EverandFrom Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsNo ratings yet
- Certified Solidworks Professional Advanced Surface Modeling Exam PreparationFrom EverandCertified Solidworks Professional Advanced Surface Modeling Exam PreparationRating: 5 out of 5 stars5/5 (1)
- Mastering Autodesk Inventor 2014 and Autodesk Inventor LT 2014: Autodesk Official PressFrom EverandMastering Autodesk Inventor 2014 and Autodesk Inventor LT 2014: Autodesk Official PressRating: 5 out of 5 stars5/5 (1)
- Autodesk Inventor | Step by Step: CAD Design and FEM Simulation with Autodesk Inventor for BeginnersFrom EverandAutodesk Inventor | Step by Step: CAD Design and FEM Simulation with Autodesk Inventor for BeginnersNo ratings yet
- Autodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersFrom EverandAutodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersNo ratings yet
- Fusion 360 | Step by Step: CAD Design, FEM Simulation & CAM for Beginners.From EverandFusion 360 | Step by Step: CAD Design, FEM Simulation & CAM for Beginners.No ratings yet