You might also like
- ANT APE4518R19v06 2333 DatasheetDocument2 pagesANT APE4518R19v06 2333 Datasheetluciano100% (1)
- IDX5315 - Al Shafar Invest Palm Jumeirah - TSSR - V1.1Document19 pagesIDX5315 - Al Shafar Invest Palm Jumeirah - TSSR - V1.1LijithYesodharanNo ratings yet
- TN73-2 Electromagnetic Disturbance Troubleshooting HelpDocument6 pagesTN73-2 Electromagnetic Disturbance Troubleshooting HelpCharls GuevaraNo ratings yet
- 04 - Cooperative Relay Networks Using FountainDocument6 pages04 - Cooperative Relay Networks Using FountainAndré José SilveiraNo ratings yet
- TDMA Scheduling Algorithms For Sensor NetworksDocument12 pagesTDMA Scheduling Algorithms For Sensor Networkswbober01No ratings yet
- Algorithms For Communication in Wireless Multi-Hop Ad Hoc Networks Using Broadcasts in Opportunistic Large Arrays (OLA)Document25 pagesAlgorithms For Communication in Wireless Multi-Hop Ad Hoc Networks Using Broadcasts in Opportunistic Large Arrays (OLA)Hemang ParikhNo ratings yet
- Optimal Communication Algorithms For Hypercubes : Journal of Parallel and Distributed Computing 11, 263-275 (1991)Document13 pagesOptimal Communication Algorithms For Hypercubes : Journal of Parallel and Distributed Computing 11, 263-275 (1991)Anonymous RrGVQjNo ratings yet
- Shuffle NetDocument6 pagesShuffle NetAnonymous c75J3yX33No ratings yet
- Delay Bounds and Scalability For Overlay Multicast: Abstract. A Large Number of Peer-To-Peer Streaming Systems Has BeenDocument13 pagesDelay Bounds and Scalability For Overlay Multicast: Abstract. A Large Number of Peer-To-Peer Streaming Systems Has BeenkanjaiNo ratings yet
- Ramakrishnan - VTC04Document4 pagesRamakrishnan - VTC04sunshinesun49No ratings yet
- Ch4. Packet SwitchingDocument6 pagesCh4. Packet SwitchingBSCNo ratings yet
- Collision Free One-Way Communications Using Reed-Solomon CodesDocument4 pagesCollision Free One-Way Communications Using Reed-Solomon CodesVidyadhar MelkeriNo ratings yet
- Cross-Layer Design For Energy Conservation in Wireless Sensor NetworksDocument6 pagesCross-Layer Design For Energy Conservation in Wireless Sensor NetworksHoang Trong MinhNo ratings yet
- IEEE 802.11 Packet Delay - A Finite Retry Limit Analysis: P. Chatzimisios, A. C. Boucouvalas and V.VitsasDocument5 pagesIEEE 802.11 Packet Delay - A Finite Retry Limit Analysis: P. Chatzimisios, A. C. Boucouvalas and V.VitsasMrajanbabu MallavarapuNo ratings yet
- WSN20101000009 22713190Document6 pagesWSN20101000009 22713190Anonymous gl18pPEvNo ratings yet
- (IJCST-V9I5P12) :chandra Kanta SamalDocument6 pages(IJCST-V9I5P12) :chandra Kanta SamalEighthSenseGroupNo ratings yet
- Deafness: A MAC Problem in Ad Hoc Networks When Using Directional AntennasDocument10 pagesDeafness: A MAC Problem in Ad Hoc Networks When Using Directional AntennasSatish NaiduNo ratings yet
- Ifet College of Engineering: Solved For Application Questions Part A (2 Marks)Document11 pagesIfet College of Engineering: Solved For Application Questions Part A (2 Marks)Nesiga R 041No ratings yet
- A Cross-Layer Optimization of IEEE 802.11 MAC For Wireless Multihop NetworksDocument3 pagesA Cross-Layer Optimization of IEEE 802.11 MAC For Wireless Multihop NetworksjollydmelloNo ratings yet
- Of Wireless Lans 1 Mac Protocols: Performance Based OnDocument5 pagesOf Wireless Lans 1 Mac Protocols: Performance Based OnmfqcNo ratings yet
- 4 Basic Routing Theory II - Adaptive Routing: Log N) For Oblivious Routing On TheDocument8 pages4 Basic Routing Theory II - Adaptive Routing: Log N) For Oblivious Routing On TheGabriel IonNo ratings yet
- 403 CombinedDocument7 pages403 CombinedMayowa AdegbuyiNo ratings yet
- Multicast Routing in WSNDocument5 pagesMulticast Routing in WSNajyshowNo ratings yet
- Capacity and Delay of Probing-Based Two-Hop Relay in ManetsDocument12 pagesCapacity and Delay of Probing-Based Two-Hop Relay in ManetsVinoth PrabhuNo ratings yet
- Packet Size: There Is A Significant Relationship Between Packet Size and Transmission TimeDocument17 pagesPacket Size: There Is A Significant Relationship Between Packet Size and Transmission TimeSimranSiMmyNo ratings yet
- Updated Bcast TechrepDocument12 pagesUpdated Bcast TechrepSatish NaiduNo ratings yet
- Chapter05 SGDocument16 pagesChapter05 SGAnis KhalafNo ratings yet
- Hidden Nodes Avoidance in Wireless Sensor NetworksDocument6 pagesHidden Nodes Avoidance in Wireless Sensor Networksdiankusuma123No ratings yet
- Completely Stale CSIT Is Very Useful David Tse IEEE Trans - Info - Theoy - 2012Document26 pagesCompletely Stale CSIT Is Very Useful David Tse IEEE Trans - Info - Theoy - 2012Don DoanNo ratings yet
- Tut 1Document2 pagesTut 120ELB355 MOHAMMAD ESAAMNo ratings yet
- Jaypee Institute of Information Technology: Computer Networks (10B11Ci611) Btech 6 SEM 2016 Tutorial-2Document9 pagesJaypee Institute of Information Technology: Computer Networks (10B11Ci611) Btech 6 SEM 2016 Tutorial-2Anubhav MishraNo ratings yet
- Ad Hoc NetworksDocument34 pagesAd Hoc NetworksRaghu JoshiNo ratings yet
- A Cooperative Broadcasting Method For A Sensor NetworkDocument10 pagesA Cooperative Broadcasting Method For A Sensor NetworkijasucNo ratings yet
- Performance Evaluation of AODV For Mobile Ad Hoc Network With Varying Probability and Node MobilityDocument5 pagesPerformance Evaluation of AODV For Mobile Ad Hoc Network With Varying Probability and Node MobilityThu HangNo ratings yet
- A Novel Packet Switch Node Architecture For Contention Resolution in Synchronous Optical Packet Switched NetworksDocument7 pagesA Novel Packet Switch Node Architecture For Contention Resolution in Synchronous Optical Packet Switched NetworkssailorwebNo ratings yet
- Maximum Throughput Scheduling in Time-Varying-Topology Wireless Ad-Hoc NetworksDocument5 pagesMaximum Throughput Scheduling in Time-Varying-Topology Wireless Ad-Hoc NetworksScoz R. FNo ratings yet
- Fakahr Abbas and Tanvir AhmedDocument6 pagesFakahr Abbas and Tanvir AhmedFakhar AbbasNo ratings yet
- IGNOU MCA MSC-042 Solved Assignments 2010Document11 pagesIGNOU MCA MSC-042 Solved Assignments 2010Anirban SarkarNo ratings yet
- Unit-5:: Link Layer & Local Area NetworksDocument39 pagesUnit-5:: Link Layer & Local Area NetworksKondareddy RamireddyNo ratings yet
- Turning Hidden Nodes Into Helper Nodes in IEEE 802.11 Wireless LAN NetworksDocument12 pagesTurning Hidden Nodes Into Helper Nodes in IEEE 802.11 Wireless LAN NetworksphdmadhuNo ratings yet
- Problem 1Document5 pagesProblem 1Chuyen Tran Nguyen PhuNo ratings yet
- Zhao 2015Document14 pagesZhao 2015DrMadhuravani PeddiNo ratings yet
- Dap An nwc203c FALL 2022Document19 pagesDap An nwc203c FALL 2022Le Xuan Hao (K17 HL)No ratings yet
- CCNA Interview Questions You'll Most Likely Be AskedDocument20 pagesCCNA Interview Questions You'll Most Likely Be AskedVibrant PublishersNo ratings yet
- Energy-Efficient MAC For Broadcast Problems in Wireless Sensor NetworksDocument4 pagesEnergy-Efficient MAC For Broadcast Problems in Wireless Sensor Networkstariq76No ratings yet
- Joint Throughput Optimization For Wireless Mesh NetworksDocument14 pagesJoint Throughput Optimization For Wireless Mesh NetworksSatish NaiduNo ratings yet
- Network Protocol and StandardsDocument6 pagesNetwork Protocol and Standardsammad ahmadNo ratings yet
- Exercicios Kurose Ross Cap1Document4 pagesExercicios Kurose Ross Cap1AboderinSegunStephenNo ratings yet
- MMC Chap5Document11 pagesMMC Chap5SOMESH B S100% (1)
- Jecet: Journal of Electronics and Communication Engineering & Technology (JECET)Document6 pagesJecet: Journal of Electronics and Communication Engineering & Technology (JECET)IAEME PublicationNo ratings yet
- CognateDocument5 pagesCognateSynesthesiaNo ratings yet
- Improving Unsynchronized MAC Mechanisms in Wireless Sensor NetworksDocument12 pagesImproving Unsynchronized MAC Mechanisms in Wireless Sensor NetworksMohammed KhalilNo ratings yet
- CN Final AnswerDocument9 pagesCN Final AnswerMicle JackNo ratings yet
- Solutions To Odd-Numbered Review Questions and ExercisesDocument2 pagesSolutions To Odd-Numbered Review Questions and ExercisesshahabzaheerNo ratings yet
- CCM: Cooperative Communication Model FOR Cooperative NetworksDocument6 pagesCCM: Cooperative Communication Model FOR Cooperative NetworksSRI SAI COLLEGENo ratings yet
- Key Elements of Protocol:: Point To PointDocument32 pagesKey Elements of Protocol:: Point To PointMalathi SankarNo ratings yet
- Packet Delay in Models of Data NetworksDocument18 pagesPacket Delay in Models of Data NetworkssplouvrosNo ratings yet
- Relay Channel ThesisDocument6 pagesRelay Channel Thesischelseaporterpittsburgh100% (2)
- Flood Performance AdhocDocument10 pagesFlood Performance AdhocОгнен СоколовNo ratings yet
- CCNA Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesFrom EverandCCNA Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesNo ratings yet
- Full-Duplex Communications for Future Wireless NetworksFrom EverandFull-Duplex Communications for Future Wireless NetworksHirley AlvesNo ratings yet
- 2.5mva TR-2 For ST Mill (New)Document2 pages2.5mva TR-2 For ST Mill (New)Vishal Kumar SinghNo ratings yet
- 2mva TR-2 For 2 PT MillDocument2 pages2mva TR-2 For 2 PT MillVishal Kumar SinghNo ratings yet
- 2mva TR-2 For 2 PT MillDocument2 pages2mva TR-2 For 2 PT MillVishal Kumar SinghNo ratings yet
- 2.5mva TR-2 For ST Mill (New)Document2 pages2.5mva TR-2 For ST Mill (New)Vishal Kumar SinghNo ratings yet
- Electrical Engineering Interview Questions With AnswersDocument6 pagesElectrical Engineering Interview Questions With AnswersManzar RizwanNo ratings yet
- Directional Over Current Relay: Current Relay (Non-Direction) Will Act For Fault Current in Any DirectionDocument6 pagesDirectional Over Current Relay: Current Relay (Non-Direction) Will Act For Fault Current in Any DirectionVeera ChaitanyaNo ratings yet
- Presentation On Transmitter of RadarDocument14 pagesPresentation On Transmitter of RadarGovind Das Soni100% (1)
- Analysis and Synthesis of Picture Signal: Md. Rasidul IslamDocument23 pagesAnalysis and Synthesis of Picture Signal: Md. Rasidul IslamchristopherNo ratings yet
- Bristow Part B EC155B1 Section 4 Normal Procedures PDFDocument28 pagesBristow Part B EC155B1 Section 4 Normal Procedures PDFrobbertmdNo ratings yet
- Dedicated Short-Range Communications Performanceevaluation Over Mmwave and Potential AdjustmentsDocument4 pagesDedicated Short-Range Communications Performanceevaluation Over Mmwave and Potential AdjustmentsSlaheddineNo ratings yet
- Impact of Ultra-Wideband Antenna Application On Underground Object DetectionDocument6 pagesImpact of Ultra-Wideband Antenna Application On Underground Object DetectionWARSE JournalsNo ratings yet
- A Self-Tuning 100 Watt Wireless Power Transfer SystemDocument113 pagesA Self-Tuning 100 Watt Wireless Power Transfer SystemEnrique AlejandroNo ratings yet
- Intersymbol Interference (ISI)Document21 pagesIntersymbol Interference (ISI)PeaceNo ratings yet
- Analog Communication LAB: Laboratory ManualDocument179 pagesAnalog Communication LAB: Laboratory ManualAlberto SaldivarNo ratings yet
- Abdullah Et Al - 2006Document7 pagesAbdullah Et Al - 2006Khalid AbrNo ratings yet
- RSS-247-i2 - Issue E March 2017Document22 pagesRSS-247-i2 - Issue E March 2017Robert LegaultNo ratings yet
- Data CommunicationDocument3 pagesData CommunicationApek KoreaNo ratings yet
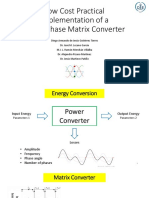
- Low Cost Practical Implementation of A Three Phase Matrix ConverterDocument18 pagesLow Cost Practical Implementation of A Three Phase Matrix ConverterdiegoadjgtNo ratings yet
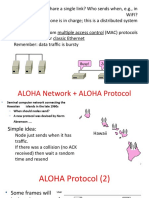
- Notes 5b Aloha ProtocolDocument58 pagesNotes 5b Aloha ProtocolThe UnCONFUSEDNo ratings yet
- Hemming - Electromagnetic Anechoic Chambers A Fundamental Design and Specification GuideDocument238 pagesHemming - Electromagnetic Anechoic Chambers A Fundamental Design and Specification GuideRakesh SandarativjuNo ratings yet
- Technical Specifications: Continuous Level Measurement Radar Level TransmittersDocument3 pagesTechnical Specifications: Continuous Level Measurement Radar Level TransmittersDavinder Singh BhattiNo ratings yet
- I9105 Troubleshooting PDFDocument82 pagesI9105 Troubleshooting PDFDaniel CekulNo ratings yet
- Christmas Lights 2020Document4 pagesChristmas Lights 2020Paul HendersonNo ratings yet
- Training Manual: PO CPDocument132 pagesTraining Manual: PO CPsurangaNo ratings yet
- Manual TPMS Leepee (Medidor Presión Neumáticos)Document6 pagesManual TPMS Leepee (Medidor Presión Neumáticos)Patricia BelloNo ratings yet
- Falcon II: U.S. Government ProductsDocument8 pagesFalcon II: U.S. Government ProductsNuittaric Firedome100% (1)
- A Simple Method To Measure Unknown InductorsDocument4 pagesA Simple Method To Measure Unknown InductorsDiogo CarvalhoNo ratings yet
- Lee Criteria Model Tuning White Paper WebDocument3 pagesLee Criteria Model Tuning White Paper WebabhinashNo ratings yet
- RRZZHHTT-65D-R6 DatasheetDocument5 pagesRRZZHHTT-65D-R6 DatasheetSandra Patricia Montero OrtaNo ratings yet
- 5G NR Boon Samsung KeynoteDocument10 pages5G NR Boon Samsung KeynoteAhmed GadNo ratings yet
- GP320: The Practical Radio: Two-Way RadiosDocument2 pagesGP320: The Practical Radio: Two-Way RadiosGianluca ZacchiNo ratings yet
- Digital Comm Receiver Design Course Richard JohnsonDocument198 pagesDigital Comm Receiver Design Course Richard Johnsonee9clhNo ratings yet
- Thamrin Executive - Cosmo Terrace TX - CosterDocument63 pagesThamrin Executive - Cosmo Terrace TX - CosterArviNaviyana50% (2)