You might also like
- Solving Systems of Equations and InequalitiesDocument29 pagesSolving Systems of Equations and InequalitiesRic NapusNo ratings yet
- System of Linear Equations - Linear Algebra WithDocument37 pagesSystem of Linear Equations - Linear Algebra Withradhikaseelam1No ratings yet
- System of Linear EquationsDocument11 pagesSystem of Linear EquationsPaul ValdiviezoNo ratings yet
- Linear Algebra Lesson 1Document16 pagesLinear Algebra Lesson 1Mab ShiNo ratings yet
- Chapter ThreeDocument34 pagesChapter ThreeJunediNo ratings yet
- System of EquationsDocument32 pagesSystem of Equationsapi-20012397No ratings yet
- Antonchap1 LinsystemsDocument23 pagesAntonchap1 Linsystemsapi-2612829520% (1)
- Solving Linear Equations Using Gaussian & Gauss-Jordan ReductionDocument11 pagesSolving Linear Equations Using Gaussian & Gauss-Jordan ReductionSoha MakhyounNo ratings yet
- Systems of Linear Equations Math 130 Linear AlgebraDocument4 pagesSystems of Linear Equations Math 130 Linear AlgebraCody SageNo ratings yet
- System of Linear EquationsDocument13 pagesSystem of Linear EquationsKomal ShujaatNo ratings yet
- System of Linear EquationsDocument37 pagesSystem of Linear EquationsHucen Nashyd MohamedNo ratings yet
- Solving Systems of Equations: MATH 15-1 Linear Algebra Week 2Document53 pagesSolving Systems of Equations: MATH 15-1 Linear Algebra Week 2JP PunsalanNo ratings yet
- Linear Equations: Unit 14 AND Euclidean SpacesDocument24 pagesLinear Equations: Unit 14 AND Euclidean SpacesRiddhima MukherjeeNo ratings yet
- Equatons of Straight LineDocument7 pagesEquatons of Straight LineBilly CheungNo ratings yet
- Mathematics: Illustrating System of Linear Equations in Two Variables - M8AL-Ih-1Document11 pagesMathematics: Illustrating System of Linear Equations in Two Variables - M8AL-Ih-1ROMEO JR RAMIREZNo ratings yet
- Assignment 1 SDocument7 pagesAssignment 1 SArc Angel Matias SerranoNo ratings yet
- Solving Systems of Linear Equations AlgebraicallyDocument21 pagesSolving Systems of Linear Equations AlgebraicallyFernanda Ortega LopezNo ratings yet
- System of Linear Equations: From Wikipedia, The Free EncyclopediaDocument8 pagesSystem of Linear Equations: From Wikipedia, The Free EncyclopediaPenghuni KontrakanNo ratings yet
- Latest Part of Latest Notes 2024 FinalDocument2 pagesLatest Part of Latest Notes 2024 Finaljibapo5785No ratings yet
- Linear Systems: MATH 149 Linear Algebra With Computer ApplicationDocument53 pagesLinear Systems: MATH 149 Linear Algebra With Computer ApplicationMyca MoliNo ratings yet
- Solving Systems of Equations: MATH 15-1 Linear Algebra Week 2Document53 pagesSolving Systems of Equations: MATH 15-1 Linear Algebra Week 2DK DMNo ratings yet
- Systems of Linear Equations: Gaussian EliminationDocument11 pagesSystems of Linear Equations: Gaussian EliminationvimabaNo ratings yet
- Advanced Engineering Mathematics Prof. Pratima Panigrahi Department of Mathematics Indian Institute of Technology, KharagpurDocument15 pagesAdvanced Engineering Mathematics Prof. Pratima Panigrahi Department of Mathematics Indian Institute of Technology, Kharagpurpatel gauravNo ratings yet
- Systems of Linear EquationsDocument8 pagesSystems of Linear EquationsPrabhakar DasNo ratings yet
- Linear Algebra Lecture Notes ch1Document10 pagesLinear Algebra Lecture Notes ch1Abdiqani Mohamed AdanNo ratings yet
- Linear Algebra Linear Equation To GaussDocument41 pagesLinear Algebra Linear Equation To GaussKhemme Lapor Chu UbialNo ratings yet
- Linear Algebra Lecture Notes Ch3Document10 pagesLinear Algebra Lecture Notes Ch3Abdiqani Mohamed AdanNo ratings yet
- m1 l1.2 - Linear SystemsDocument32 pagesm1 l1.2 - Linear SystemsHera ReinaNo ratings yet
- Systems of Linear EccuationsDocument14 pagesSystems of Linear EccuationsRaulNo ratings yet
- Systems of Linear EquationsDocument9 pagesSystems of Linear EquationsRahayu RasliNo ratings yet
- Cu 3Document39 pagesCu 3omgitsjediNo ratings yet
- Solving Linear Systems in 3 StepsDocument36 pagesSolving Linear Systems in 3 StepspudnchinaNo ratings yet
- Lab 99Document18 pagesLab 99Dom ClutarioNo ratings yet
- Ch1 Numerical Methods Lecture NotesDocument10 pagesCh1 Numerical Methods Lecture NotesAbdiqani Mohamed AdanNo ratings yet
- Advanced AlgebraDocument20 pagesAdvanced AlgebraRems RecablancaNo ratings yet
- CH 08 Section 1Document15 pagesCH 08 Section 1Charles LangatNo ratings yet
- Section 2: Systems of Linear EquationsDocument10 pagesSection 2: Systems of Linear EquationsDidula ThrimannaNo ratings yet
- I Can Solve Systems of Equations Graphically ViaDocument1 pageI Can Solve Systems of Equations Graphically Viaapi-297021169No ratings yet
- Systems of Linear EquationsDocument82 pagesSystems of Linear Equationsmatematica1319No ratings yet
- Linear Equations Lecture Note 2Document14 pagesLinear Equations Lecture Note 2Angel NicolasNo ratings yet
- Gaussian EliminationDocument22 pagesGaussian Eliminationnefoxy100% (1)
- CCCCCC C C C: CC CCDocument5 pagesCCCCCC C C C: CC CCAdam AnaNo ratings yet
- Math1070 130notes PDFDocument6 pagesMath1070 130notes PDFPrasad KharatNo ratings yet
- Lecture 1 Systems of Linear EquationsDocument17 pagesLecture 1 Systems of Linear Equations2221891No ratings yet
- Systems of Linear EquationsDocument19 pagesSystems of Linear EquationsAZAIIINo ratings yet
- Simultaneous EquationDocument10 pagesSimultaneous EquationsabbysamuraNo ratings yet
- System of Linear Equations: Slide For MA1203 Business Mathematics II Week 1 & 2Document28 pagesSystem of Linear Equations: Slide For MA1203 Business Mathematics II Week 1 & 2Tamene KibrNo ratings yet
- BSI-111 Linear Algebra: Dr. Abid IqbalDocument30 pagesBSI-111 Linear Algebra: Dr. Abid IqbalHannan Sajjad JZ Batch 22No ratings yet
- Linear Algebra NotesDocument39 pagesLinear Algebra NotestglakasNo ratings yet
- Chapter 1 Linear EquationsDocument31 pagesChapter 1 Linear Equationsongchua2719No ratings yet
- Linear Equations in Linear Algebra Section 1Document21 pagesLinear Equations in Linear Algebra Section 1Hsan SlimNo ratings yet
- Systems of Linear EquationsDocument15 pagesSystems of Linear EquationsjhoyNo ratings yet
- Systems of Linear EquationsDocument10 pagesSystems of Linear EquationsatNo ratings yet
- Systems of Linear Equations in Three Variables Extra CreditDocument7 pagesSystems of Linear Equations in Three Variables Extra CreditFleur BurnsNo ratings yet
- Lecture1 PDFDocument6 pagesLecture1 PDFAnonymous ewKJI4xUNo ratings yet
- Topic 5-Systems of Linear EquationsDocument46 pagesTopic 5-Systems of Linear EquationsNqobile PhokaneNo ratings yet
- Eselon, Dimeensi, Gauss, Gauss Jordan PDFDocument10 pagesEselon, Dimeensi, Gauss, Gauss Jordan PDFAnanda AzhariNo ratings yet
- m40 s12 Lecture4Document3 pagesm40 s12 Lecture4ammar_harbNo ratings yet
- CE 337/CE 568: Prestressed Concrete Design: Prof. Sasankasekhar MandalDocument30 pagesCE 337/CE 568: Prestressed Concrete Design: Prof. Sasankasekhar MandalAkshay VaghasiyaNo ratings yet
- GR 7 ASSET WORKSHEET HWDocument6 pagesGR 7 ASSET WORKSHEET HWSharon BijuNo ratings yet
- The Study L’école Internationale - Units and Measurement AssignmentDocument6 pagesThe Study L’école Internationale - Units and Measurement Assignmentdhivya shreeNo ratings yet
- Sculptris Cheat SheetDocument1 pageSculptris Cheat SheetGiovanny ArceNo ratings yet
- Electric Circuit Research PaperDocument4 pagesElectric Circuit Research PaperXChoGodxNo ratings yet
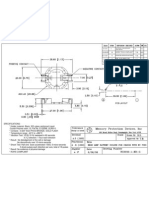
- 10/22/05 B T.B. B.S. 8/11/07 C T.B. B.S. 11/21/07 Dim. 5.30 Was 5.00 T.B. B.S. DDocument1 page10/22/05 B T.B. B.S. 8/11/07 C T.B. B.S. 11/21/07 Dim. 5.30 Was 5.00 T.B. B.S. DyogpanditNo ratings yet
- Balanced and Unbalanced ForcesDocument31 pagesBalanced and Unbalanced ForcesInah MasubayNo ratings yet
- Granta EduPack Release NotesDocument8 pagesGranta EduPack Release Notes3220355No ratings yet
- Quadrotor Quaternion Control: June 2015Document8 pagesQuadrotor Quaternion Control: June 2015nguyễn công nghĩaNo ratings yet
- How Tall A Column in Block Caving 2014-May-2Document11 pagesHow Tall A Column in Block Caving 2014-May-2carlo cerruttiNo ratings yet
- Globalipl Development Limited Proforma Invoice for Diode Laser Hair Removal MachineDocument1 pageGlobalipl Development Limited Proforma Invoice for Diode Laser Hair Removal MachineSaif KareemNo ratings yet
- MFDSML 2024 - Iiit NRDocument2 pagesMFDSML 2024 - Iiit NRVijay GopiKrishnanNo ratings yet
- Ial Maths m2 Ex2eDocument7 pagesIal Maths m2 Ex2eJackNo ratings yet
- WoPhO 2011 S12Document12 pagesWoPhO 2011 S12TienMC GamerNo ratings yet
- 1st Year Incourse Exam Applied MathematicsDocument2 pages1st Year Incourse Exam Applied MathematicsEagle SubbirNo ratings yet
- Gabriel Eugenio CHAO, Dispersive Surface Acoustic Waves in Poroelastic MediaDocument143 pagesGabriel Eugenio CHAO, Dispersive Surface Acoustic Waves in Poroelastic MediaOlegNo ratings yet
- 1.31 Rings and Travelers For CottonDocument52 pages1.31 Rings and Travelers For CottonKannan KrishnamurthyNo ratings yet
- Albert, David - Quantum Mechanics and ExperienceDocument108 pagesAlbert, David - Quantum Mechanics and Experiencekarenhunt9583% (6)
- GRAVEL Packer Tool OperationDocument7 pagesGRAVEL Packer Tool OperationCerón Niño Santiago100% (2)
- Design of Seismic-Resistant Steel Building Structures: 3. Concentrically Braced FramesDocument123 pagesDesign of Seismic-Resistant Steel Building Structures: 3. Concentrically Braced FramesMarvin MessiNo ratings yet
- Analysis & Design of Multistorey BuildingDocument124 pagesAnalysis & Design of Multistorey Buildingriyasproject86% (36)
- EDEM-FLUENT Tutorial: 2-Phase Lagrangian Simulation: Revision 2.2/2Document7 pagesEDEM-FLUENT Tutorial: 2-Phase Lagrangian Simulation: Revision 2.2/2gurpinder.rajgarh1331No ratings yet
- COMSOL Modelling and Simulation of PEM Fuel Cell's Flow ChannelsDocument7 pagesCOMSOL Modelling and Simulation of PEM Fuel Cell's Flow ChannelsBeichaNo ratings yet
- Design of Cities: (Edmund N. Bacon) By-Abhiti Rawat and Harsh JaiswalDocument12 pagesDesign of Cities: (Edmund N. Bacon) By-Abhiti Rawat and Harsh JaiswalHarsh JaiswalNo ratings yet
- Recent Trends in Civil EngineeringDocument1,081 pagesRecent Trends in Civil EngineeringEsmailAlshogary100% (4)
- MPI Detects Surface FlawsDocument172 pagesMPI Detects Surface FlawsRamesh RNo ratings yet
- CFD Analysis of A Wickless Heat Pipe: January 2018Document8 pagesCFD Analysis of A Wickless Heat Pipe: January 2018Optimuz TsNo ratings yet
- May2017 Physics Paper 2 TZ1 HL MarkschemeDocument16 pagesMay2017 Physics Paper 2 TZ1 HL MarkschemeAnanya AggarwalNo ratings yet
- Metals 12 01076 v2Document20 pagesMetals 12 01076 v2Yasa CossioNo ratings yet
- Phase Transition Dynamics, Onuki A, CUP 2002Document725 pagesPhase Transition Dynamics, Onuki A, CUP 2002Ionut Florica100% (1)