You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Chapters 10 - 11 Circles Theorems - Point & LinesDocument11 pagesChapters 10 - 11 Circles Theorems - Point & LinesXie ChenxinNo ratings yet
- Arts 1Document2 pagesArts 1Joshua De Leon TuasonNo ratings yet
- Conics and QuadricsDocument3 pagesConics and QuadricsDarabaGabriellNo ratings yet
- Curves Do Carmo NotesDocument7 pagesCurves Do Carmo NotesDharil ShahNo ratings yet
- Lesson Plan-3501Document7 pagesLesson Plan-3501api-514620182No ratings yet
- Tutorial Chapter 2Document1 pageTutorial Chapter 2fatthul hadiNo ratings yet
- WWW Tec Ease Com GDT Terms PHPDocument14 pagesWWW Tec Ease Com GDT Terms PHPlaboratorioNo ratings yet
- The Concept of Physical and Spiritual SPDocument12 pagesThe Concept of Physical and Spiritual SPAmar PašićNo ratings yet
- Lecture Notes - Modeling of Mechanical SystemsDocument27 pagesLecture Notes - Modeling of Mechanical Systemsurs_anwar5875No ratings yet
- RPT Math Form 2Document16 pagesRPT Math Form 2Hartini KosnanNo ratings yet
- The Existential Image PDFDocument18 pagesThe Existential Image PDFPaulo César Martínez BerecheNo ratings yet
- Eg 07 Planar - Dips6Document1 pageEg 07 Planar - Dips6Miguel Sanchez CastilloNo ratings yet
- 05 GCSE 1387 Paper 5 Nov 2003Document19 pages05 GCSE 1387 Paper 5 Nov 2003greatest6No ratings yet
- MENSURATION (Part1) : Geometric ShapesDocument9 pagesMENSURATION (Part1) : Geometric ShapesAthiyo MartinNo ratings yet
- Calculus III - Stokes' TheoremDocument5 pagesCalculus III - Stokes' TheoremSahilNo ratings yet
- Ejection-Collision Orbits in The CPRTBPDocument1 pageEjection-Collision Orbits in The CPRTBPOscar R100% (2)
- CE6102 - 6 - Geometric Nonlinearity - Large Strain and Large Deformation ProblemsDocument16 pagesCE6102 - 6 - Geometric Nonlinearity - Large Strain and Large Deformation ProblemsandreashendiNo ratings yet
- Straight Lines Slides-239 PDFDocument465 pagesStraight Lines Slides-239 PDFYash Chaudhaury100% (1)
- 3 2 4 1 - +, Showing The Coordinates of The Points Where The Curve Intersects The Coordinate Axes.Document14 pages3 2 4 1 - +, Showing The Coordinates of The Points Where The Curve Intersects The Coordinate Axes.Nirvaan PuriNo ratings yet
- Cec 106 Theory - Strength of MaterialsDocument77 pagesCec 106 Theory - Strength of MaterialsVietHungCao79% (14)
- Westfall 1969Document21 pagesWestfall 1969JamesNo ratings yet
- 2022 Kinematics Tutorial SolnDocument8 pages2022 Kinematics Tutorial SolnRyan ChanNo ratings yet
- UNIT 2 PPTDocument98 pagesUNIT 2 PPTsuganya004No ratings yet
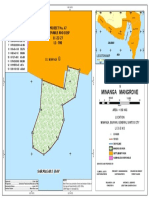
- 44 Minanga - Buayan - Mangrove PDFDocument1 page44 Minanga - Buayan - Mangrove PDFCirilo Jr. LagnasonNo ratings yet
- Strain CylindricalDocument4 pagesStrain CylindricalebrahimpanNo ratings yet
- Forces Motion VocabDocument15 pagesForces Motion VocabEDWARD TORRES-BALDERASNo ratings yet
- Newton's Laws Answers ExplainedDocument2 pagesNewton's Laws Answers ExplainedKingPhysicsNo ratings yet
- The Simple Essence of Dewey B. Larson's Reciprocal System of Physics (Boardman, Jameela) PDFDocument10 pagesThe Simple Essence of Dewey B. Larson's Reciprocal System of Physics (Boardman, Jameela) PDF潘浩No ratings yet
- Practical Orientalism - Bodies, Everyday Life and The Construction of OthernessDocument13 pagesPractical Orientalism - Bodies, Everyday Life and The Construction of OthernessJinsun YangNo ratings yet
- On Partial Geometries Arising From Maximal ArcsDocument25 pagesOn Partial Geometries Arising From Maximal Arcstim penttilaNo ratings yet