You might also like
- Lec 30Document16 pagesLec 30Norween Glory Alberto ValdezNo ratings yet
- Lec 23Document17 pagesLec 23Manthan PomalNo ratings yet
- Surveying Prof. Bharat Lohani Department of Civil Engineering Indian Institute of Technology, KanpurDocument54 pagesSurveying Prof. Bharat Lohani Department of Civil Engineering Indian Institute of Technology, Kanpursurendra_pangaNo ratings yet
- Lec 2Document17 pagesLec 2akhilNo ratings yet
- Work System Design Dr. Inderdeep Singh Department of Mechanical and Industrial Engineering Indian Institute of Technology-RoorkeeDocument19 pagesWork System Design Dr. Inderdeep Singh Department of Mechanical and Industrial Engineering Indian Institute of Technology-RoorkeeAashay PareNo ratings yet
- Continue: Micro Motion Study in Industrial Engineering PDFDocument3 pagesContinue: Micro Motion Study in Industrial Engineering PDFA SquerNo ratings yet
- Ergonomics for Beginners Industrial DesignDocument18 pagesErgonomics for Beginners Industrial DesignAmaan KhanNo ratings yet
- Lec 14Document26 pagesLec 14GANJI PALAVENKIREDDYNo ratings yet
- Human Resource Management: I Prof. Kalyan Chakravarti Department of Basic Courses Indian Institute of Technology, KharagpurDocument19 pagesHuman Resource Management: I Prof. Kalyan Chakravarti Department of Basic Courses Indian Institute of Technology, KharagpurIvani KatalNo ratings yet
- Lec 15Document20 pagesLec 15Mani VannanNo ratings yet
- Lec 19Document16 pagesLec 19Bakir KhanNo ratings yet
- Lec10 PDFDocument17 pagesLec10 PDFakhilNo ratings yet
- Computer Aided Engineering Design Prof. Anupam Saxena Department of Mechanical Engineering Indian Institute of Technology, Kanpur Lecture - 2Document26 pagesComputer Aided Engineering Design Prof. Anupam Saxena Department of Mechanical Engineering Indian Institute of Technology, Kanpur Lecture - 2Kudrat SharmaNo ratings yet
- Scaling lawDocument17 pagesScaling lawVibin NivasNo ratings yet
- Instructor (Oussama Khatib) :okay, Let's Get Started. So Today's Movie Segment IsDocument19 pagesInstructor (Oussama Khatib) :okay, Let's Get Started. So Today's Movie Segment IsFares MentseurNo ratings yet
- Introduction to Algorithms & Data Structures 3: Learn Linear Data Structures with Videos & Interview QuestionsFrom EverandIntroduction to Algorithms & Data Structures 3: Learn Linear Data Structures with Videos & Interview QuestionsRating: 5 out of 5 stars5/5 (1)
- Lec 3Document23 pagesLec 3Sai SrinivasNo ratings yet
- Robots and Automation - Wave Lesson Project - Lesson TemplateDocument2 pagesRobots and Automation - Wave Lesson Project - Lesson TemplatedanagrahNo ratings yet
- IIT Kharagpur Lecture on Dynamic Branch Prediction TechniquesDocument26 pagesIIT Kharagpur Lecture on Dynamic Branch Prediction Techniquesurjashah3No ratings yet
- Lec16 PDFDocument7 pagesLec16 PDFNitesh SinghNo ratings yet
- Design and Analysis of Algorithms Prof. Madhavan Mukund Chennai Mathematical Institute Week - 01 Module - 01 Lecture - 01Document8 pagesDesign and Analysis of Algorithms Prof. Madhavan Mukund Chennai Mathematical Institute Week - 01 Module - 01 Lecture - 01SwatiNo ratings yet
- Oadelec4 Week17Document13 pagesOadelec4 Week17Christine Mae MontesNo ratings yet
- MRP Planning Materials for Product ManufacturingDocument16 pagesMRP Planning Materials for Product ManufacturingSanjayNo ratings yet
- IE Lecture 6 Motion Study and Micromotion StudyDocument25 pagesIE Lecture 6 Motion Study and Micromotion StudyMariver LlorenteNo ratings yet
- So, Hello Everyone, This Is The Final Lecture On The NPTEL Course Mechanical Characterization of Bituminous MaterialDocument41 pagesSo, Hello Everyone, This Is The Final Lecture On The NPTEL Course Mechanical Characterization of Bituminous MaterialNabanita RoyNo ratings yet
- Lec 2Document19 pagesLec 2Shayan Sen GuptaNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 24Document27 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 24mahendranNo ratings yet
- SubtitleDocument5 pagesSubtitleThamizharasu KannazhaganNo ratings yet
- 11 Time Observation SheetDocument4 pages11 Time Observation SheetmatidiNo ratings yet
- Lec 1Document27 pagesLec 1Pragnesh PatelNo ratings yet
- Model?: Why Would We Need This Model?Document13 pagesModel?: Why Would We Need This Model?Pallavi PatilNo ratings yet
- Lec 7Document28 pagesLec 7tamizhanNo ratings yet
- Lec 42Document25 pagesLec 42RamanNo ratings yet
- Project Management For Managers Dr. M.K. Barua Department of Management Indian Institute of Technology, Roorkee Lecture - 45 Slacks and Floats-IDocument13 pagesProject Management For Managers Dr. M.K. Barua Department of Management Indian Institute of Technology, Roorkee Lecture - 45 Slacks and Floats-IChirag SabhayaNo ratings yet
- Fast Diagram PDFDocument16 pagesFast Diagram PDFROHIT SINGHNo ratings yet
- Prof. Sounak Kumar Choudhury Department of Mechanical Engineering Indian Institute of Technology, Kanpur Lecture - 01Document15 pagesProf. Sounak Kumar Choudhury Department of Mechanical Engineering Indian Institute of Technology, Kanpur Lecture - 01balramNo ratings yet
- Lec 20Document17 pagesLec 20Bakir KhanNo ratings yet
- Introduction to UMLDocument20 pagesIntroduction to UMLTavo TavoNo ratings yet
- Experimental Stress Analysis Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasDocument24 pagesExperimental Stress Analysis Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrastamizhanNo ratings yet
- Unit 4 Motion Study and Work DesignDocument15 pagesUnit 4 Motion Study and Work DesignMa. Pearlie San Pedro AndrinNo ratings yet
- Maximizing Efficiency Through Motion StudyDocument5 pagesMaximizing Efficiency Through Motion StudyMary Grace CiervoNo ratings yet
- Artificial Intelligence Prof. P. Dasgupta Department of Computer Science & Engineering Indian Institute of Technology, KharagpurDocument22 pagesArtificial Intelligence Prof. P. Dasgupta Department of Computer Science & Engineering Indian Institute of Technology, KharagpurSaidNo ratings yet
- Product Design Value EngineeringDocument16 pagesProduct Design Value EngineeringANKUSHNo ratings yet
- Introduction to Robotics: Defining Robots and Their UsesDocument16 pagesIntroduction to Robotics: Defining Robots and Their UsesRahul PandeyNo ratings yet
- Work Study StepsDocument18 pagesWork Study StepsPriyanshu SrivastavaNo ratings yet
- Calculus For Beginners and ArtistDocument128 pagesCalculus For Beginners and Artists_rank90No ratings yet
- Basic Matrix Concepts - Devdas MenonDocument179 pagesBasic Matrix Concepts - Devdas MenonnataliaNo ratings yet
- Principles of Motion EconomyDocument3 pagesPrinciples of Motion EconomyR Màhá LâkshmîNo ratings yet
- NPTEL Transcript PDFDocument977 pagesNPTEL Transcript PDFLakshmiNarayana Reddy BynagariNo ratings yet
- Lec 40Document19 pagesLec 40SanjayNo ratings yet
- VLSI Physical Design Prof. Indranil Sengupta Department of Computer Science and Engineering Indian Institute of Technology, Kharagpur Lecture - 01Document16 pagesVLSI Physical Design Prof. Indranil Sengupta Department of Computer Science and Engineering Indian Institute of Technology, Kharagpur Lecture - 01Nahin AminNo ratings yet
- IIT Quality Design and Control Lecture on Statistical Process ControlDocument22 pagesIIT Quality Design and Control Lecture on Statistical Process ControlANKUSHNo ratings yet
- PipeliningDocument25 pagesPipeliningAditya PrakashNo ratings yet
- Lec4 PDFDocument29 pagesLec4 PDFpriyaNo ratings yet
- Biometrics Prof. Phalguni Gupta Department of Computer Science and Engineering Indian Institute of Technology, KanpurDocument34 pagesBiometrics Prof. Phalguni Gupta Department of Computer Science and Engineering Indian Institute of Technology, Kanpurlamba5No ratings yet
- Matrix MethodDocument21 pagesMatrix MethodGirish DeshmukhNo ratings yet
- Lec 44Document19 pagesLec 44SonamNo ratings yet
- 2 Course IntroductionDocument3 pages2 Course Introductional_snowNo ratings yet
- Wu.89083913384-Seq - 61 (10 Files Merged)Document16 pagesWu.89083913384-Seq - 61 (10 Files Merged)imrannila910No ratings yet
- PTS SamDocument27 pagesPTS Samimrannila910No ratings yet
- Slide 1Document3 pagesSlide 1imrannila910No ratings yet
- Therbligs Are A Set of 18 Basic Elemental Motions or Actions That Can Be Used To Analyze and Improve Manual Work ProcessesDocument2 pagesTherbligs Are A Set of 18 Basic Elemental Motions or Actions That Can Be Used To Analyze and Improve Manual Work Processesimrannila910No ratings yet
- Irrevocable Letter of CreditDocument1 pageIrrevocable Letter of CreditJunvy AbordoNo ratings yet
- Exercise 1 Key PDF Cost of Goods Sold InvenDocument1 pageExercise 1 Key PDF Cost of Goods Sold InvenAl BertNo ratings yet
- MPU3222 - Course Introduction Briefing For Student (Sem 1 - 2022-2023) (I)Document24 pagesMPU3222 - Course Introduction Briefing For Student (Sem 1 - 2022-2023) (I)trickyhunter9999No ratings yet
- Indian Film Manufacturers Adding Capacities To Meet Growing Demand For Bopp and BopetDocument8 pagesIndian Film Manufacturers Adding Capacities To Meet Growing Demand For Bopp and BopetSanjay Kumar ShahiNo ratings yet
- Parfums Cacharel de L'Oréal 1997-2007:: Decoding and Revitalizing A Classic BrandDocument21 pagesParfums Cacharel de L'Oréal 1997-2007:: Decoding and Revitalizing A Classic BrandrheaNo ratings yet
- BuxlyDocument13 pagesBuxlyAimen KhatanaNo ratings yet
- Book 1Document3 pagesBook 1nauraluna.nevetari.sriyono-2021No ratings yet
- Bsa - Finman - SyllabusDocument13 pagesBsa - Finman - SyllabusAbdulmajed Unda MimbantasNo ratings yet
- BMOA DAYS GENERAL GUIDELINES FinalDocument26 pagesBMOA DAYS GENERAL GUIDELINES FinalCharlotte Balladares LarideNo ratings yet
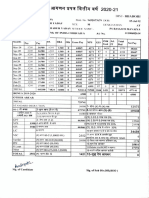
- Income Tax Agadan PrapatraDocument3 pagesIncome Tax Agadan Prapatraat.amitkumarbstNo ratings yet
- UntitledDocument143 pagesUntitledSanthosh KumarNo ratings yet
- GW-Solar System Container PDFDocument4 pagesGW-Solar System Container PDFedwardoNo ratings yet
- Access Data: Statistic As Excel Data FileDocument5 pagesAccess Data: Statistic As Excel Data FileAKSHAT MITTALNo ratings yet
- PQ 0620-CombinedDocument55 pagesPQ 0620-CombinedMISODZI CHIBAKWENo ratings yet
- Description Income Expenses Assets LiabilitiesDocument12 pagesDescription Income Expenses Assets LiabilitiesNipuna Perera100% (1)
- South Est BankDocument78 pagesSouth Est BankGolpo MahmudNo ratings yet
- Amigo Manufacturing V. Cluett Peabody CoDocument3 pagesAmigo Manufacturing V. Cluett Peabody CoShiela Arboleda MagnoNo ratings yet
- Business Plan Concept Design StudioDocument26 pagesBusiness Plan Concept Design StudioMichael Kagube100% (2)
- 5 Key Financial Ratios and How To Use ThemDocument10 pages5 Key Financial Ratios and How To Use ThemdiahNo ratings yet
- 9B Cash Flow NPV and Portfolio Simulation ModelsDocument11 pages9B Cash Flow NPV and Portfolio Simulation ModelsChan AnsonNo ratings yet
- NH - Cardiac Care of The PoorDocument11 pagesNH - Cardiac Care of The PoorJordan ScottNo ratings yet
- Economics of The AirlinesDocument40 pagesEconomics of The AirlinesAdriel M.No ratings yet
- OCD-LGU MOA for Isolation Facility ConstructionDocument8 pagesOCD-LGU MOA for Isolation Facility ConstructionORLANDO GIL FAJICULAY FAJARILLO Jr.No ratings yet
- Marketing Plan for Houzit HomewaresDocument7 pagesMarketing Plan for Houzit HomewaresMina PrajapatiNo ratings yet
- Marketing Plan Final ReMarketing Plan of ACME Agrovet Beverage LTD PortDocument84 pagesMarketing Plan Final ReMarketing Plan of ACME Agrovet Beverage LTD PortNafiz FahimNo ratings yet
- Zambia National Commercial Bank PLC ProspectusDocument104 pagesZambia National Commercial Bank PLC ProspectusBilly LeeNo ratings yet
- Building International Brand Architecture: Integrating Branding Strategy Across MarketsDocument19 pagesBuilding International Brand Architecture: Integrating Branding Strategy Across MarketsDiana GuceaNo ratings yet
- Ký B I: Công Ty TNHH Dogota Ký Ngày: 3/6/2022 10:38:26: Signature Not VerifiedDocument1 pageKý B I: Công Ty TNHH Dogota Ký Ngày: 3/6/2022 10:38:26: Signature Not VerifiedThoa Bùi KimNo ratings yet
- Business IdeaDocument5 pagesBusiness IdeaKarina SNo ratings yet
- PLDT Inc - 17a 2019Document381 pagesPLDT Inc - 17a 2019Kylie Luigi Leynes BagonNo ratings yet