You might also like
- Free Cost Accounting Sohail Afzal With SolutionDocument2 pagesFree Cost Accounting Sohail Afzal With SolutionHafizUmarArshad50% (18)
- Statistics Made Easy Presentation PDFDocument226 pagesStatistics Made Easy Presentation PDFAbhi ThakkarNo ratings yet
- Obstacle Avoiding RobotDocument17 pagesObstacle Avoiding RobotNishant Kamal93% (15)
- Obstacle Avoidance Robotic Vehicle Using Ultrasonic Sensor and Arduino MicrocontrollerDocument5 pagesObstacle Avoidance Robotic Vehicle Using Ultrasonic Sensor and Arduino MicrocontrollerkentNo ratings yet
- Line Follower Robot PresentationDocument25 pagesLine Follower Robot Presentationmirrayhan0867% (6)
- Line Follower Robot PDFDocument5 pagesLine Follower Robot PDFNameet JainNo ratings yet
- NTT Docomo Inc. - Group 9 - EOS BDocument9 pagesNTT Docomo Inc. - Group 9 - EOS BManas DasNo ratings yet
- Obstacle Avoiding Robot Using Ultrasonic SensorDocument10 pagesObstacle Avoiding Robot Using Ultrasonic SensorANIL KUMAR CSTSERVICESNo ratings yet
- Obstacle Avoidance RobotDocument9 pagesObstacle Avoidance Robotnagasaikiran ponnapalliNo ratings yet
- Department of Technical EducationDocument12 pagesDepartment of Technical EducationDinesh NNo ratings yet
- Advance Robotics - Self - Learning Kit - ArduinoDocument68 pagesAdvance Robotics - Self - Learning Kit - ArduinoHarry George ElangbamNo ratings yet
- DLD PROJECT-Ayusha Vinayak Jagtap 211071071Document6 pagesDLD PROJECT-Ayusha Vinayak Jagtap 211071071Ayusha JagtapNo ratings yet
- Obstacle Avoiding RobotDocument17 pagesObstacle Avoiding RobotSmiley Boy Aanand100% (1)
- Human Detection Robot DetailsDocument6 pagesHuman Detection Robot DetailschirayilrichardNo ratings yet
- Four Way Tracking Car TutorialDocument26 pagesFour Way Tracking Car Tutorialvadym_kovalenko4166No ratings yet
- Lab Report 5.1Document4 pagesLab Report 5.1Hassan KobrosliNo ratings yet
- Obstacle Avoiding RobotDocument18 pagesObstacle Avoiding RobotAJIN KNo ratings yet
- 5 6066828862526850364Document24 pages5 6066828862526850364Vivek Kalpana Laxman NarsaleNo ratings yet
- GRP ProjectDocument8 pagesGRP ProjectgunmeetsinghNo ratings yet
- Presentation Smart StickDocument16 pagesPresentation Smart StickwhatseNo ratings yet
- Bitirme RaporuDocument26 pagesBitirme RaporuZeynal Abidin ŞabaşNo ratings yet
- REPORTDocument22 pagesREPORThohi4808No ratings yet
- DIY Adriano Obstacle Avoiding CarDocument6 pagesDIY Adriano Obstacle Avoiding CarAshwiniNo ratings yet
- Line Follower Robot Using ArduinoDocument13 pagesLine Follower Robot Using Arduinolizhi2012No ratings yet
- Arduino BookDocument17 pagesArduino BookhnuitthitaunglmdNo ratings yet
- S.D.M. College of Engineering & Technology, Dharwad - 580 002Document8 pagesS.D.M. College of Engineering & Technology, Dharwad - 580 002Kumar NeerajNo ratings yet
- Obstacle Avoidance Robot With Ultrasonic Sensor: Abidur Rahman Sagor 18-38599-2Document8 pagesObstacle Avoidance Robot With Ultrasonic Sensor: Abidur Rahman Sagor 18-38599-2Abid SagorNo ratings yet
- Line Follower Robot Using Arduino: PBL Review Report OnDocument10 pagesLine Follower Robot Using Arduino: PBL Review Report OnAvinash KumarNo ratings yet
- Line Follower Robot Using Arduino and L298N ModuleDocument9 pagesLine Follower Robot Using Arduino and L298N ModuleBizuneh getuNo ratings yet
- Ks0159 Keyestudio Desktop Bluetooth Mini Smart CarDocument26 pagesKs0159 Keyestudio Desktop Bluetooth Mini Smart CarpotroloinNo ratings yet
- Four-Legged Walking Robot: A Comprehensive Report On The QuadrupedDocument10 pagesFour-Legged Walking Robot: A Comprehensive Report On The QuadrupedArnav SharmaNo ratings yet
- Project Report GR 01 Maes BDocument9 pagesProject Report GR 01 Maes BFAISAL AHMED MRIDHA FATINNo ratings yet
- Line Follower Robot Using ArduinoDocument5 pagesLine Follower Robot Using Arduinochockalingam athilingam100% (1)
- PROJECTDocument20 pagesPROJECT023 manjushree gNo ratings yet
- Autonomous Obstacle Avoiding and Path Following RoverDocument12 pagesAutonomous Obstacle Avoiding and Path Following RoverIndian MusicNo ratings yet
- Metal Detecting Robot - BluetootDocument5 pagesMetal Detecting Robot - Bluetootraji hammedNo ratings yet
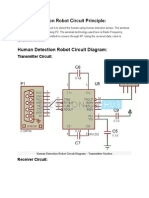
- Human Detection Robot Circuit PrincipleDocument4 pagesHuman Detection Robot Circuit PrincipleAli KhanNo ratings yet
- Co Project: Edge Avoiding Robot USING 8051 MicrocontrollerDocument14 pagesCo Project: Edge Avoiding Robot USING 8051 MicrocontrollerJuthik BVNo ratings yet
- 2-Way Sound Sensitive Line FollowerDocument13 pages2-Way Sound Sensitive Line FollowerAbhishek DasNo ratings yet
- Internet of Things and MM Jury PDFDocument20 pagesInternet of Things and MM Jury PDFGagan SinghviNo ratings yet
- Obstacle Avoiding RobotDocument17 pagesObstacle Avoiding Robotukavnganesh2002No ratings yet
- DIY Project Group 6 Report - Gesture Controlled Robotic VehicleDocument16 pagesDIY Project Group 6 Report - Gesture Controlled Robotic VehiclekritiNo ratings yet
- Project Report: Btech-Mechanical EngineeringDocument17 pagesProject Report: Btech-Mechanical EngineeringNaveen SNo ratings yet
- Arduino PresentationDocument43 pagesArduino PresentationraamNo ratings yet
- Hall Sensor UserManualDocument2 pagesHall Sensor UserManualAldaz JacomeNo ratings yet
- E-2 Report (Yasir Abbas)Document9 pagesE-2 Report (Yasir Abbas)Mirza Riyasat AliNo ratings yet
- Line Follower RobotDocument16 pagesLine Follower RobotVenkat Munnangi100% (1)
- Remote Controlled Robot Using ArduinoDocument5 pagesRemote Controlled Robot Using ArduinodanielNo ratings yet
- Fire Fighting Robot: Presented byDocument19 pagesFire Fighting Robot: Presented byAws Faeq100% (1)
- Lab Based Project Report On: Obstacle Avoiding RobotDocument27 pagesLab Based Project Report On: Obstacle Avoiding Robotyaswanth yashuNo ratings yet
- Line Follower RobotDocument6 pagesLine Follower Robotomkar maliNo ratings yet
- Line Follower RobotDocument16 pagesLine Follower RobotRohit sharmaNo ratings yet
- AkhilDocument25 pagesAkhilNiharikaNo ratings yet
- Design and Implementation of Line Follower Robot Using Arduino MicrocontrollerDocument4 pagesDesign and Implementation of Line Follower Robot Using Arduino MicrocontrollerFahru ZainiNo ratings yet
- Report Anh HưngDocument16 pagesReport Anh Hưngbamuoithangtudn30No ratings yet
- Project Presentation PDFDocument22 pagesProject Presentation PDFARIF KANONNo ratings yet
- Advanced Line FollowerDocument15 pagesAdvanced Line FollowerMohtasim NakibNo ratings yet
- ANDRAWDocument6 pagesANDRAWOdoch HerbertNo ratings yet
- RoverDocument3 pagesRoverClass 12No ratings yet
- PIRMEC PresentationDocument41 pagesPIRMEC PresentationmanuieeeNo ratings yet
- Automatic Railway Gate Control SystemDocument5 pagesAutomatic Railway Gate Control SystemTasnim RahmanNo ratings yet
- Robot Car Instructions PDFDocument21 pagesRobot Car Instructions PDFAmin Iqmal100% (2)
- Exploring Arduino: Tools and Techniques for Engineering WizardryFrom EverandExploring Arduino: Tools and Techniques for Engineering WizardryRating: 4.5 out of 5 stars4.5/5 (5)
- Light Cameo: MidtownDocument10 pagesLight Cameo: Midtownapi-25933302100% (2)
- Networking in DMRCDocument16 pagesNetworking in DMRCaanchalbahl62100% (1)
- DRS 2018 Simeone Et Al. FinalDocument13 pagesDRS 2018 Simeone Et Al. FinalLuca SimeoneNo ratings yet
- 90203-1104DEC E Cont Operations PDFDocument414 pages90203-1104DEC E Cont Operations PDFelmacuarro5No ratings yet
- 201705samsungsdi Ess enDocument7 pages201705samsungsdi Ess enbpchimeraNo ratings yet
- 1 N 52 XXBDocument2 pages1 N 52 XXB81968No ratings yet
- NF79115240802810 ETicket-1Document3 pagesNF79115240802810 ETicket-1Aftab AlamNo ratings yet
- Cba and CBQ: C1 Rxlev - Rxlev - Access - Min - Rxlev: Average Receive Level of The Ms in The Unit of DBMDocument3 pagesCba and CBQ: C1 Rxlev - Rxlev - Access - Min - Rxlev: Average Receive Level of The Ms in The Unit of DBMTadele TekaNo ratings yet
- Baan Query Tool 2.7: User Guide - Baan LNDocument28 pagesBaan Query Tool 2.7: User Guide - Baan LNmoughabatNo ratings yet
- MD5 and SHA 1Document6 pagesMD5 and SHA 1Syed SalmanNo ratings yet
- Session 5. Confidence Interval of The Mean When SD Is Known (18-22)Document5 pagesSession 5. Confidence Interval of The Mean When SD Is Known (18-22)Roldan Soriano CardonaNo ratings yet
- Vietnamese Alphabet BingoDocument32 pagesVietnamese Alphabet BingoMinh Hoa NguyenNo ratings yet
- Sr650 Setup GuideDocument230 pagesSr650 Setup GuideDebojit GoswamiNo ratings yet
- Amjad Ali Teaching CVDocument3 pagesAmjad Ali Teaching CVamjadali544No ratings yet
- Manual Olt PDFDocument51 pagesManual Olt PDFValdei JuniorNo ratings yet
- CMMS D-FW 2014-04 8034520g1Document246 pagesCMMS D-FW 2014-04 8034520g1Nelson KempNo ratings yet
- Manual MillerDocument44 pagesManual MillerIsai MixiaNo ratings yet
- MC ToolkitDocument162 pagesMC Toolkitరామకృష్ణ పాశలNo ratings yet
- Unit 3: Steps To Business Partner and Customer Vendor Integration (CVI)Document17 pagesUnit 3: Steps To Business Partner and Customer Vendor Integration (CVI)zulfiqar26No ratings yet
- DM Guide PDFDocument59 pagesDM Guide PDFPaulo MartinsNo ratings yet
- Retro Internet Interface Personal Organizer For College by SlidesgoDocument55 pagesRetro Internet Interface Personal Organizer For College by SlidesgoAhda BayaniNo ratings yet
- Adjusted AU7505 CW Pump-Screening (Harbin)Document2 pagesAdjusted AU7505 CW Pump-Screening (Harbin)waqas_a_shaikh4348No ratings yet
- Activity 2Document11 pagesActivity 2Lebron Bryant100% (1)
- How To Use The SIM7100 Module in LinuxDocument7 pagesHow To Use The SIM7100 Module in LinuxpprandiniNo ratings yet
- R7410102 Finite Element Methods in Civil EngineeringDocument4 pagesR7410102 Finite Element Methods in Civil EngineeringsivabharathamurthyNo ratings yet
- Cisco Catalyst 9300 24-Port Data: S.No Product DescriptionDocument6 pagesCisco Catalyst 9300 24-Port Data: S.No Product DescriptionUmAiR ANo ratings yet
- 22MCC20067 WS1Document6 pages22MCC20067 WS1Neeraj KukretiNo ratings yet