COURS ROBOTIQUE
Animé par: MOULAHI Med Hedi
CAL.
Paes
*
-
woe
eatin retrain God)
oqloiaion sont respscter
Chapitre |. Definitions et terminologies
4 Automatisation, robotique et productique
* Autom:
tion : Ensemble des procédés visant &
réduire ou supprimer lintervention humaine dans les
processus de preduction
“Automatiser un systéme : C'est lui donner certaine
‘autonomie et dorc réduire lntervention humaine tout en
‘augmentant la veleur ajoutée
‘Robot : Ce mot ire sa racine du Bulgare « Robs» sigifant seniteur
(celui qui est au serve de quelqu'un) et qui est aussi tr parle mot
‘Tehéque « ROBOTA use tredut parle travail
= La robotique : C'est la science des robots, on dit pratiquer la
robotique ou robotiser c’est-a-dire automatiser un systéme en
Uitiisant des outils modernes (technologies las plus récentes). On
est alors sur le terrain de la mécatronique e' la productique tout
en faisant la robotique.
+ La productique : cst l'art de produire en utilisant les
technologies moderres. Son équivalent en anglais « Computer
Integrated Manufacturing : CIM » ou fabrication intégrée grace &
‘exploitation des outls XAO.
Dans ce cas la robotque en tant que science des robots:
nlintervient que comme un sous ensemble.
ees
[ Slee | Pas 5
sma eae | ame
oS | cee!
ice pamee] imi! ok |
ce eee cul
ee ee
an i
scaeraeystaame
12 Relation hom tache, éolution vers automatisation
leita que made de relation Hons ech ql neon a fagan dont
Tore ait suri the ela fon de conte exévion dea tach
Mode 1: Unomme a rectoment su Toul avec sa face muscu leone dela
ache es raisédrecomen et en pemanence pr Thon avecun processus de
reiou information viele ou tate (at au tuché)
[aso at clears APC at ara
Tava areas manuel
Mode 2: Lout ost us recoment a (now, anne) arborea, mais
por un ou puseursactonneus quireoient de énerge de exteu Les
‘actoaneus sot plot par Ihonme avec des commantes manual (as des
tmacines outs, ngs, pont role... Lexéatx dea ace es encore
conte par Thonme,
BAe ee ane teal
Mode: ren €un gaa command ete Thane lt com La
pee eeee ier eure antennae
Demme shop iat meio co ectormms et
Faceron id arse Mal cone al pomme ot citet e
tebe tne oen yr Pesala ek i ecasanea
fumonn i censdt a os Nerds GM pane son oul
Beye ie gi amet vel peas apie
‘towne aor ami,
[mee .
=
Lise
ode 4: Le méme principe ue a fgue 2c mals sat do a foncton perception de
Fenvicanement au moyen dos capturs exes « ou caps enrocepd », asant
référence encore au vecabuie du cops tuman. Ces captrs sont gnome ps
Cleves qu le capurs names. ans ce cas de gure hme na donne qn re
Ii réalsation de tuseet le conte de sa bonne exseuton se font ce manire
autonome
1.3. Les familles de robots
leriste deux eatgoties ce robots:
> Les bra: manipulates ou robo fae)
[ee
=| LETH Les robes mebles
9 132 Robot mobile
13.1 Robot industri! (Bras manipulateurs)
labs du obot st rijdemsat fide au so, générale
rancor dans les syibmes de praducon als que
* Manutention des pices: (cargerent des machines,
cut, tansfrt des piéces dun ais ult pour
paltisaton), Le robot do cecuer das movements —
Souvent simples mas apes prs avo sai obot. “=
feneu endo connu pour dpser& un autre eno
lest crac para structure qui ot empiri cons de base
> Lafonetonacomatve
> Lafonctonporepton- decision (ecologies catous)
>Lafonctoneclsaion (én)
Slonparle de la deundme fonction :erobt dot de capable analyser son
emvennement goblet cal
133 Les robots humancides
-Asmoisimoaacon leubsmoviciberg WALKMAN nnvaknan ss
AD
144. Torminolgie dans es robots
‘vocabulaire de a rotatque
Terminologie
‘Auton
‘Nombre de dec de brs (NOL sun
manpulateur
*Coniguraton aise
+E space arteulie(espace de confgwaton)
sRedondance
*Coniguation sngulre
‘© Notion articulation dans larobotique
‘Aticulation rotcide
|i agit une ariculaton de type pivot, notée R, réduisant le mouvement entre
deux cops @ une rotation autour dun axe commun. La rotation relative entre
les deux oops est paramétrépar angle @ autour de cet axe,
lamobité dune arcuaion (OL
‘Aticulaton prsmatique
li agit une ariculation de ype gissiére,notée °F", éduisantle mouvement
entre deux corps a une translation le long d'un axe commun. Le déplacement
relative ene les deux cops est paramété parla distance d le long de cet
ied-b
lamobate une artclatin(
‘Un ebot non edondant cose des dears de ie por postonnar et nner
out place en bout du point.
7 4
Exomple dartculations eons un robot
‘@Nombre de degré de lberté (NDL) d'un manipuateu: Cesta nombre des
pxamdves indipendanindcassaie pour dere a statin de Forgane trina dans
espace cartésin. On cnsidere un root industel ctl ower, chaque pion
«de chaquearzulaion ex dfn parun sel parame, lenambre darcltio dans
a cases ouour 6galeau NOL
‘© Configuration articuie dun robot: cate configuration présente état des
rents segments du rob. tates ert par des varies arcuatres
© Espace articular (espace de configuration) sun rob: ct espace
représente espace de varies aca. Dan css dune chan ouverte
simple nombre de viable rue indépendant (dmeion n= NOL
(© Espace opérationele (de dimensions 1 m = 6): cst espace dans
lequel est represen para stuton ce organe emia, es systome de
‘ordonnée carésinr,cynique et phe, Le rane de variables arizules
Indpendarios nécoese pour spctarla stuaton dn caps dans Fespace
titimensoonel et a
‘@Reciondance: ces une situation dans laquelle NOL ce orgne ein est
inkrour au nombre dariaulaton oto
Cet propriiéperet ce préserer les capacés de dépacement de Fefeteur en
présence dottades, (cules DOL suplémentae(s axsant eur contournemant
‘Example des tchosrdkndantas
Proceé de mauoge
Procédé de soudege
Procéié de calage
ots ron egondant gases
‘isco ANA >
aewana @ meen
Robe hyper redone:
(goo)
Comore de DOU)
‘© Configuration single: ces une stuaton dans aqua le NOL de forgane
terminal est ineur au dimension de espace oration, lst une stuaion de
‘etondance locale,
Deux aes darculatonvismatque se trouventparale
Deux aes Barizulaton tide se rowentcofondus
En fonction dela tache areal,
la compatbité rbot tate (NDL oye wnt = NOL)
1.4 Architecture des robots industriels morphologic
Tous ls robots ne se rsseblen pas et pourtant se esemie su canes foncons|
base assurées par spt sous-esembies. Chacun dezessoussystomes assure une
fenclon qu ell-méme ut sxprmar de mulipe manere a riveau el raisaton
technaue.
‘Avniveu sucte | — sane
:
ricenae erin
scsi L [== |
percgalenentor priate
tava wena ns =
ete: l
Sones —
ova = fe
‘une stu mene ite (SA) Sore et anes oi se on
ipo ere sense sen Sesconcraies Seine aanesbon tne
Cot src mécangue atc es rig par une caine cndmatque do
segrent. Gnéralerer ils sont rides assem par ds lasers apples
ariovaton de ye pismatques ou eeies pour obi un mouvement ra de
‘sogmants vis.
Les psions relatives des segments vlins sont mesures par des capteus de
positon atacés & cruque ariculton existe tos jee de chanes
‘oui Cu met
Chain femme esi un tour
mécanique dn ou plusieu segments &
\ aute danslachane
ei
) i
KG '
‘Avantage et inconvénient entre es chaines séries et fermées
2
avanlage: vantage:
Un gan espace atelgnatle Rigs
+ Viasse
* Psion
Plusleurs organes terminaux qut agissent en paralléle
Les rina fabrcants
ferobor nasi » .
eee ¢
Kuna, A u
[Staubhi, Denso,
Nachi, Kawasaki q
‘Onin de dnomver les tents
architcurespossbles, on cose
deuxparamates dteminant.
‘Le ype drtoulaton(aesraque ou
roti}
{On aati sos panier DL in
robot (8 pat deta base dure
Porteurdu robot.
Le eto de DL forme fe pognd
‘corctnas por doo donor
‘beaucoup pls peas etune pls fa
Danslapraiqu le pigs est de type
rule eles tepndu. Greater
le priur du root dont es axes sot
saitparales sot perpenculares.
Les principaux erties dk chosi une structure morphoogique des porteurs en
‘vue dune application dornée sont:
‘Ses perfomance géomeigusfome et dimension de san volume 6 vavel
[Les caractissques de tach &alser
‘url plan pratique on tow principale los cing stuctves des prteurssivantos
Robot AstucureaR Robot Asrcture Robot Astrcture
fantropema sphiriqu ou pola &cyinciqu RPP] oy (PRP)
peer ‘axe de rotation
‘orthogonale
tespieiea ees “oe
thon pot
5 Principales caractéristiques géométriques d'un robot sont
(Nombre aes (ms por coon).
avhocure (sve cu paall)
A Chainage des aricatins.
Nome de depres bent
Exomples dasscition de artculatons afin de fomer une structure plyariaué dun
robot a base des arivatos pismatiqes erodes.
© Volume accesible fr fut robot Ce vlume dépond
1 dela geomet dota,
1 deta lorgueur des segment,
1 ucbatiement des arcs (mid par dos bus).
(© Precsion et répeabite
[DPostionrement abs impricks (>t man): Coc est a
“Erours e moddie gong,
» Eres de quaniicaion de a mesure de poston,
“Fx
a Rapatbit arabs un rbot es ereurmexmal de posionnement
‘tout en tov pot de Son apace de revel en gra arpa <1
a
(© Pernmances dnariques
‘vitesse maximale
“Atte maimale de tanslaon cu do rotation de chy ax.
Les cansbucteus dornentsowent ue visse deamon mamale de forgene
‘ering
‘coteration maximae
“Est donne pour chan axe dans la congwraton aps évoabe (nee
raximal, charge masini).
“Depend fetment einer dan da la postion os roto.
© crag we
[Cesta charge masmale que peut pore obo san grader apa et es
performances dynamiues.
‘GLa charge ule et retoment iret a charge maxerale que peut poe
robot ules directement dSpendante des acboneurs.
(© Exel de fiche tenia dun bot
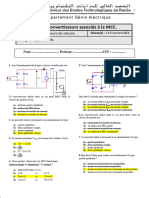
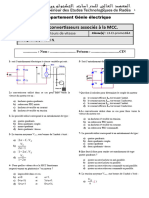
1.5 Le systome de commande de robot
Le systéme de command un robot comport quatre Gases de boucle de conte
Lees pss von spre
‘venue rgulatncoespon 30
‘meelsude ratte avon
‘venue Ws ras de robe pret
‘prs qu pr de gutens
‘rst en nein ie got
autoruq case ne peli ps.
Paral eertre memes atone
st cones dx qn vt compe
Ge ptaconnes ies et nt
Car femans se
La ftonents eqn
Lis ja artelaon
on
‘Apes veut iene ls nen de oma al doer tone a
ten surate
Quel rjectoe a sulrepour exéevterla tee dso 7
Bion entendu a tace orsante une medfcaton de Fentonnemen du robot
Ces tis iva premetmpéaiveren en compe de cet eniromemen.
Le premier vay parm asl tdi auxcompetarentsquon apale ixe
‘ adepiation. Donte tut deve ious es choos ees costaces errews, Ce genre
‘de comande (exe) emis en lge ate 3 norman oui par des capieus
butune modification de ajc préve au dar
ete nedcaton peut pence plement tis fomes
1 A du robot ae & obs et passage de ctinfraton 8 un iveay
sipériur de cone qui dide dune noweletrajectore 8 sive
> Le cantoumerentaulomaique de ebstce das un sens 386 8 pro ta epse
elated inl aprés avo cancun Toba
"Le ontounementadéqua e obstacle en foncion des ports de obstacle
(olume, foo.) tds canes des objects assigns.
‘ete desite forme eect une ransiton avec les aiveaux pseu avon nomen
‘ainnnemen a apenison la apni eva aha inn hs)
‘aumisset a foncon percetn capable analyser Teniromenent et fen dedire
une statigle dexdcuton dea tate et de gnéte des raecores mete en cane
ILA Introduction
Larobotque est compost esseselemont
Dine stucure mécarque ance
CHAPITRE.U ‘Des cre niveauxde commande (comirande en peso, conmande en
LES GRANDEURS & MAITRISER DANS LA
COMMANDE DES ROBOTS
‘oss, commande en efor
4050 decent
Mogéisaton du MCC aveeschémabloes
Ph wigh T ately
map at
Une boule de vise tachmdtiue
Une boul de regulation postion
te 008
rbot cme dns eee ea be La ie 5 mone epi eee ion dense
Eom eit i mpi in eb ee 2. it ine ie)
ati
a oe ae nt dap ec sb Ba in spe
emote ie etn epee nt ns dn uti at
113 Systéme de coordonnées en robotique
Pour ales tches scutes,
Tout dot pouvoir ee dle dans
‘um espace til as crar un lu.
Ce volume, bomé par des nes
Pyles 6 bras, test apyele
Fespace de aval
our deniers points dan: cet espace on ise des repiesothanormés des
‘apparent un sstime de cooronndes
Lerepire it au rie tment de base dela
‘iru du rbot suis comme rlerenee,
Carpe ah nt RM, Ya.) rp oe
+, pasion commu en par uisateu
Lerepir i af (rgane eile
yl Xu Yu 2 onepe natreement une
poston spefiuedemandé par usssteu
(Chaque cos du robot est :bé par un aconear: Pour nbc ne compatant que
es artclabons raids, orevouve un meu pour chaque axe Bancuston.
(Cest acon des cs motu qu perma de iver Tout dans espace de ava
‘Onno, dy 9 dy es vaiebles de positon angle (ou rial) ees
roeus
‘On apple “coniguton aria" Ie
eu do vdeus atovaes que robot
rod 8 instant door 4 (3. 59>
4u) Des parantes som dns
dans Pasace area du robe. Pour
‘passer dn syste de coordanndes &
auto on ule des mace de
transformation. Ces modéles dependent
You might also like
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Corrigé New Test3Document3 pagesCorrigé New Test3mohamed ben slimaneNo ratings yet
- New Test3Document3 pagesNew Test3mohamed ben slimaneNo ratings yet
- Correction Devoir 1Document3 pagesCorrection Devoir 1mohamed ben slimaneNo ratings yet
- APznzaYfT8I4XKq6tv-UM3ZXl-Hst7U3ZYa2DMR5DYI3pqJ1cvjX-Z5O0yRps9BU36aRgkDdBTXItEIPj23DLaONUpjpcoZX2-q_h1BVjYy6AIGq8DW7qoPJqmLBoSbXw8skGVQU5dgpLoNLbXSWWeLgyI4k8vFMQXvmq5Db8AOGy03msHFGv7e_i2_6-KApGUrAoh2zJ2xq4VgUTFpcgXgxDocument6 pagesAPznzaYfT8I4XKq6tv-UM3ZXl-Hst7U3ZYa2DMR5DYI3pqJ1cvjX-Z5O0yRps9BU36aRgkDdBTXItEIPj23DLaONUpjpcoZX2-q_h1BVjYy6AIGq8DW7qoPJqmLBoSbXw8skGVQU5dgpLoNLbXSWWeLgyI4k8vFMQXvmq5Db8AOGy03msHFGv7e_i2_6-KApGUrAoh2zJ2xq4VgUTFpcgXgxmohamed ben slimaneNo ratings yet
- 01 Chapitre-1 VHDLDocument11 pages01 Chapitre-1 VHDLmohamed ben slimaneNo ratings yet
- APznzaaw2ORoRWxw2cHZTrQf-nvEdq8ZfsRH-W2rtGqw_RKeH3M9CzsCp3TwStUDajWoxmHKcirqvkKVyo2Ii370FTuh54mC0M0jTkJYoauMeJ5l0JDriaZlR1VYy-BtO7LNlyx58f9W9hKM_Ux7N9SxJbds1Ds1aN2L2_0qu3ohubmH6EcbtFdk_HRcBP22i1vNgjiqLbrkav1iyHBVvdXuDocument6 pagesAPznzaaw2ORoRWxw2cHZTrQf-nvEdq8ZfsRH-W2rtGqw_RKeH3M9CzsCp3TwStUDajWoxmHKcirqvkKVyo2Ii370FTuh54mC0M0jTkJYoauMeJ5l0JDriaZlR1VYy-BtO7LNlyx58f9W9hKM_Ux7N9SxJbds1Ds1aN2L2_0qu3ohubmH6EcbtFdk_HRcBP22i1vNgjiqLbrkav1iyHBVvdXumohamed ben slimaneNo ratings yet
- Chapitre 3 Rãgimes de NeutreDocument19 pagesChapitre 3 Rãgimes de Neutremohamed ben slimaneNo ratings yet
- IntroductionDocument13 pagesIntroductionmohamed ben slimaneNo ratings yet
- APznzaao_OLT-9z6yuaqA3MgBKLzTuax_qZbgIqkLqJNNs5TTZrJJerst_XDIYIHh6pOAplf07dqUPnsy_OiuhVKN4pCm1amG-2rdx16JKuuqShAewgdjDoch77qJa0PEdxIYxX2eTsKWMyML_mfoCgvuxV6je9z3h6jWZCKiqjypx7Oxv-Fm484WKs3IHlr5qUMPrQ56SULbMtKtYNEL39KDocument6 pagesAPznzaao_OLT-9z6yuaqA3MgBKLzTuax_qZbgIqkLqJNNs5TTZrJJerst_XDIYIHh6pOAplf07dqUPnsy_OiuhVKN4pCm1amG-2rdx16JKuuqShAewgdjDoch77qJa0PEdxIYxX2eTsKWMyML_mfoCgvuxV6je9z3h6jWZCKiqjypx7Oxv-Fm484WKs3IHlr5qUMPrQ56SULbMtKtYNEL39Kmohamed ben slimaneNo ratings yet
- APznzaa4P9SdCe5THZYBfhCUV_zr5HZNxmf0pzc9AKbvfXPH_jLhhUH7ofVn1DSdRyuGX3lP-mCplj9TkOQuwuW7VeXnJrqkiGs4NUxiwhxos9_3kilEBl_ZxfqT52lQ7mr_jB1f4J2Dk8VEDxjxdUdkEJKzS--mpfS4x1z425Buge78HhkA2abbT_YoyERTlAlY1IyGG1GPEs090xpWFLG6Document3 pagesAPznzaa4P9SdCe5THZYBfhCUV_zr5HZNxmf0pzc9AKbvfXPH_jLhhUH7ofVn1DSdRyuGX3lP-mCplj9TkOQuwuW7VeXnJrqkiGs4NUxiwhxos9_3kilEBl_ZxfqT52lQ7mr_jB1f4J2Dk8VEDxjxdUdkEJKzS--mpfS4x1z425Buge78HhkA2abbT_YoyERTlAlY1IyGG1GPEs090xpWFLG6mohamed ben slimaneNo ratings yet
- Chap 3 Les Bascules Syst Log 2Document8 pagesChap 3 Les Bascules Syst Log 2mohamed ben slimaneNo ratings yet
- Chapitre 4 Les Compteurs Et Décompteurs Asynchrones Partie 1Document12 pagesChapitre 4 Les Compteurs Et Décompteurs Asynchrones Partie 1mohamed ben slimaneNo ratings yet
- Chapitre 4 HabilitationDocument12 pagesChapitre 4 Habilitationmohamed ben slimaneNo ratings yet
- Nouveau Document Microsoft Word 2Document3 pagesNouveau Document Microsoft Word 2mohamed ben slimaneNo ratings yet