You might also like
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Microcontroladores PIC con programación PBP: INGENIERÍA ELECTRÓNICA Y DE LAS COMUNICACIONESFrom EverandMicrocontroladores PIC con programación PBP: INGENIERÍA ELECTRÓNICA Y DE LAS COMUNICACIONESRating: 5 out of 5 stars5/5 (2)
- Robótica y domótica básica con Arduino: Ingeniería de control automáticoFrom EverandRobótica y domótica básica con Arduino: Ingeniería de control automáticoRating: 4.5 out of 5 stars4.5/5 (7)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Processing: Desarrollo de interfaces de usuario, aplicaciones de visión artificial e IoT para Arduino y ESP8266From EverandProcessing: Desarrollo de interfaces de usuario, aplicaciones de visión artificial e IoT para Arduino y ESP8266Rating: 5 out of 5 stars5/5 (1)
- Wind Loading Calculator Sheet (Per ASCE 7-05 Code)Document4 pagesWind Loading Calculator Sheet (Per ASCE 7-05 Code)Saranya ChandruNo ratings yet
- Resolución de averías lógicas en equipos microinformáticos. IFCT0309From EverandResolución de averías lógicas en equipos microinformáticos. IFCT0309No ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Desarrollo Web De Principiante a Profesional con Paga, Volumen 2: Desarrollo Web De Principiante a Profesional con Paga, #2From EverandDesarrollo Web De Principiante a Profesional con Paga, Volumen 2: Desarrollo Web De Principiante a Profesional con Paga, #2No ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Gestión de servicios en el sistema informático. IFCT0609From EverandGestión de servicios en el sistema informático. IFCT0609No ratings yet
- Investment ManagementDocument119 pagesInvestment ManagementMaría LoboNo ratings yet
- Kotlin y Jetpack Compose. Desarrollo de aplicaciones AndroidFrom EverandKotlin y Jetpack Compose. Desarrollo de aplicaciones AndroidNo ratings yet
- Raspberry Pi Fundamentos y Aplicaciones: HARDWARE (O SOPORTE FÍSICO DEL ORDENADOR)From EverandRaspberry Pi Fundamentos y Aplicaciones: HARDWARE (O SOPORTE FÍSICO DEL ORDENADOR)Rating: 5 out of 5 stars5/5 (5)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Aprender Arduino, electrónica y programación con 100 ejercicios prácticosFrom EverandAprender Arduino, electrónica y programación con 100 ejercicios prácticosRating: 4.5 out of 5 stars4.5/5 (14)
- Fundamentos básicos de NVIDIA Jetso NanoFrom EverandFundamentos básicos de NVIDIA Jetso NanoRating: 3 out of 5 stars3/5 (1)
- Aprender Raspberry Pi 4 con 100 ejercicios prácticosFrom EverandAprender Raspberry Pi 4 con 100 ejercicios prácticosRating: 5 out of 5 stars5/5 (4)
- Iniciación al diseño de circuitos impresos con Altium DesignerFrom EverandIniciación al diseño de circuitos impresos con Altium DesignerNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Taller de Arduino. Experimentando con Arduino MKR 1010From EverandTaller de Arduino. Experimentando con Arduino MKR 1010No ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Arquitectura basada en contexto para el soporte de servicios de VoD de IPTFrom EverandArquitectura basada en contexto para el soporte de servicios de VoD de IPTNo ratings yet
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeFrom EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeNo ratings yet
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosFrom EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosRating: 5 out of 5 stars5/5 (5)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- 100 circuitos de shields para arduino (español)From Everand100 circuitos de shields para arduino (español)Rating: 3.5 out of 5 stars3.5/5 (3)
- Compilador C CCS y Simulador Proteus para Microcontroladores PICFrom EverandCompilador C CCS y Simulador Proteus para Microcontroladores PICRating: 2.5 out of 5 stars2.5/5 (5)
- Instalación y configuración de periféricos microinformáticos. IFCT0309From EverandInstalación y configuración de periféricos microinformáticos. IFCT0309No ratings yet
- Gestión de incidentes de seguridad informática. IFCT0109From EverandGestión de incidentes de seguridad informática. IFCT0109No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- Algoritmos Genéticos con Python: Un enfoque práctico para resolver problemas de ingenieríaFrom EverandAlgoritmos Genéticos con Python: Un enfoque práctico para resolver problemas de ingenieríaRating: 5 out of 5 stars5/5 (5)
- 03 H-046-000805-00 BeneHeartD6 Quick Guide (Es) PDFDocument24 pages03 H-046-000805-00 BeneHeartD6 Quick Guide (Es) PDFAngela Leguizamon FuentesNo ratings yet
- Protecciones - Gonzales SabatoDocument926 pagesProtecciones - Gonzales Sabatodiego ojeda0% (1)
- Python Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWAREFrom EverandPython Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWARERating: 4 out of 5 stars4/5 (13)
- Aplicaciones gráficas con Python 3From EverandAplicaciones gráficas con Python 3Rating: 3.5 out of 5 stars3.5/5 (6)
- Desarrollo de componentes software para el manejo de dispositivos. IFCT0609From EverandDesarrollo de componentes software para el manejo de dispositivos. IFCT0609No ratings yet
- Arduino. Trucos y secretos.: 120 ideas para resolver cualquier problemaFrom EverandArduino. Trucos y secretos.: 120 ideas para resolver cualquier problemaRating: 5 out of 5 stars5/5 (5)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Microcontrolador STM32 Programación y desarrollo: INGENIERÍA ELECTRÓNICA Y DE LAS COMUNICACIONESFrom EverandMicrocontrolador STM32 Programación y desarrollo: INGENIERÍA ELECTRÓNICA Y DE LAS COMUNICACIONESRating: 3.5 out of 5 stars3.5/5 (3)
- Python Aplicaciones prácticasFrom EverandPython Aplicaciones prácticasRating: 4 out of 5 stars4/5 (18)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Contratación y supervisión de trabajos de preimpresión. ARGN0109From EverandContratación y supervisión de trabajos de preimpresión. ARGN0109No ratings yet
- Curso básico | Raspberry Pi: El manual para principiantes con fundamentos sobre hardware, software, ...From EverandCurso básico | Raspberry Pi: El manual para principiantes con fundamentos sobre hardware, software, ...No ratings yet
- Raspberry Pi: Guía Completa para Principiantes sobre Configuración, Programación (conceptos y técnicas) y Desarrollo de Proyectos geniales de Raspberry PiFrom EverandRaspberry Pi: Guía Completa para Principiantes sobre Configuración, Programación (conceptos y técnicas) y Desarrollo de Proyectos geniales de Raspberry PiNo ratings yet
- Corrección gamma: Mejora de la claridad visual en la visión por computadora: la técnica de corrección gammaFrom EverandCorrección gamma: Mejora de la claridad visual en la visión por computadora: la técnica de corrección gammaNo ratings yet
- FTTHDocument7 pagesFTTHAbdessamad DarimNo ratings yet
- (Texts in Applied Mathematics 12) J. Stoer, R. Bulirsch (Auth.) - Introduction To Numerical Analysis-Springer New York (1993) - 107-121Document15 pages(Texts in Applied Mathematics 12) J. Stoer, R. Bulirsch (Auth.) - Introduction To Numerical Analysis-Springer New York (1993) - 107-121Rahul VasanthNo ratings yet
- Cuenta de Ahorros1274 - Enero-2022Document2 pagesCuenta de Ahorros1274 - Enero-2022leticia cuartasNo ratings yet
- Chapter5-The Memory SystemDocument78 pagesChapter5-The Memory SystemAvirup RayNo ratings yet
- ADAPT-Builder 2019 New Features SupplementDocument97 pagesADAPT-Builder 2019 New Features SupplementephremNo ratings yet
- Unit 4 and 5Document4 pagesUnit 4 and 5Rj AlejandroNo ratings yet
- Nutanix Enterprise Cloud: The Ideal Platform For Devops: ©2016 Nutanix, Inc. All Rights ReservedDocument2 pagesNutanix Enterprise Cloud: The Ideal Platform For Devops: ©2016 Nutanix, Inc. All Rights ReservedAmitbobNo ratings yet
- Internet: What Is A Web Page?Document2 pagesInternet: What Is A Web Page?Precious InternationalNo ratings yet
- SI C2-S1 Formato-RubricaDocument6 pagesSI C2-S1 Formato-RubricaJOSHUA O BRYAN HURTADO VIVARNo ratings yet
- Unit 5 - NotesDocument11 pagesUnit 5 - NotesBhavna SharmaNo ratings yet
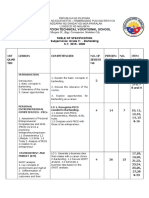
- 1st TOS in TLE Bartending Mconcepcion 2019Document6 pages1st TOS in TLE Bartending Mconcepcion 2019SHEALA LADERANo ratings yet
- Plantilla Parte Programación de TurnosDocument9 pagesPlantilla Parte Programación de TurnosAntoni Lopez DelgadoNo ratings yet
- Medir La Humedad Del Suelo Con Arduino e Higrómetro FCDocument11 pagesMedir La Humedad Del Suelo Con Arduino e Higrómetro FCGarcia FranciscoNo ratings yet
- Ultrascale Plus Fpga Product Selection GuideDocument11 pagesUltrascale Plus Fpga Product Selection Guideismail topcuNo ratings yet
- Motorola 6809 Instruction SetDocument11 pagesMotorola 6809 Instruction SetzbytiNo ratings yet
- Sesion 21 Diseño Pagina Web - CSSDocument7 pagesSesion 21 Diseño Pagina Web - CSSMaricielo PeñaNo ratings yet
- Book-Principles of Marketing Engineering and Analytics 3rd EditionDocument329 pagesBook-Principles of Marketing Engineering and Analytics 3rd EditionMihaiNo ratings yet
- Guia Actividad 3 Tic SenaDocument12 pagesGuia Actividad 3 Tic SenaMarce BNo ratings yet
- Week01 CIS3303 Intro To System Architecture 22VFDocument37 pagesWeek01 CIS3303 Intro To System Architecture 22VFjayanthan sabalingamNo ratings yet
- Silo - Tips - Conferencia Internacional de Software Libre Malaga 18 Al 20 de Febrero de 2004Document6 pagesSilo - Tips - Conferencia Internacional de Software Libre Malaga 18 Al 20 de Febrero de 2004Alvaro ZabalaNo ratings yet
- Prentice Hall-Halting The Hacker-2nd EdDocument205 pagesPrentice Hall-Halting The Hacker-2nd EdDa NyNo ratings yet
- Punto 2Document5 pagesPunto 2Erik HerreraNo ratings yet
- Effect of Bolt Pretension in Single Lap Bolted Joint IJERTV4IS010269Document4 pagesEffect of Bolt Pretension in Single Lap Bolted Joint IJERTV4IS010269ayush100% (1)
- Manual CscapeDocument1 pageManual CscapeFelipe LuzaNo ratings yet
- GeomaticaDocument3 pagesGeomaticaAndrea MorenoNo ratings yet
- Patrones de La Administracion en IbmDocument2 pagesPatrones de La Administracion en Ibmarita3ANo ratings yet