You might also like
- Projectreportmain PDFDocument36 pagesProjectreportmain PDFAnshul TailorNo ratings yet
- Drive Assignment 212Document23 pagesDrive Assignment 212Johnson AkinyeleNo ratings yet
- Idc - Sem-07 PDFDocument67 pagesIdc - Sem-07 PDFNitin PrajapatiNo ratings yet
- Chapter 1 Intro To Electrical DrivesDocument76 pagesChapter 1 Intro To Electrical DrivesAfiq ZahinNo ratings yet
- Final PDF EditedDocument6 pagesFinal PDF EditedFirdous NaazNo ratings yet
- 6034 April 19Document15 pages6034 April 19Hat HackersNo ratings yet
- Electrical DrivesDocument194 pagesElectrical DrivesKITSAO SAMUELNo ratings yet
- Bule Hora University Department of Ece Eceg 4222 Power Electronics & Electric DrivesDocument14 pagesBule Hora University Department of Ece Eceg 4222 Power Electronics & Electric DrivesBilisuma DamiteNo ratings yet
- Introduction To Electrical DrivesDocument18 pagesIntroduction To Electrical DrivesSidali Chaib50% (2)
- Model Predictive Control For DC Motors: Lafta E. J. Alkurawy Nisreen KhamasDocument6 pagesModel Predictive Control For DC Motors: Lafta E. J. Alkurawy Nisreen KhamasShubham ranjanNo ratings yet
- AC MotorDocument3 pagesAC MotormadhumithaaNo ratings yet
- Introduction To Electrical Drives: Figure 1 Conventional Variable Speed Electrical Drive SystemDocument19 pagesIntroduction To Electrical Drives: Figure 1 Conventional Variable Speed Electrical Drive SystemChakradhara TheppavariNo ratings yet
- Activity No. 2: Motor and Electric DrivesDocument17 pagesActivity No. 2: Motor and Electric DrivesAldrian BarachinaNo ratings yet
- Lecture Notes On Utilization of Electric PDFDocument421 pagesLecture Notes On Utilization of Electric PDFPuneeth PuniNo ratings yet
- Electrical Drives and Control - Unit-I (MECHANICAL ENGINEERING)Document83 pagesElectrical Drives and Control - Unit-I (MECHANICAL ENGINEERING)Thivya PrasadNo ratings yet
- Ac and DC MotorDocument6 pagesAc and DC MotorKhairunnisa ZakiriNo ratings yet
- Electric DrivesDocument5 pagesElectric DrivesSiddhant GaikwadNo ratings yet
- Introduction To Electrical DrivesDocument11 pagesIntroduction To Electrical DrivesGaurav SrivastavaNo ratings yet
- Drives in Mechatronics1Document14 pagesDrives in Mechatronics1Durga PrasadNo ratings yet
- Electrical DrivesDocument204 pagesElectrical DrivesRuchiNo ratings yet
- Direct Current (DC) Motors: OperationDocument6 pagesDirect Current (DC) Motors: OperationckyprianouNo ratings yet
- Ac DCDocument3 pagesAc DCUmar AfzalNo ratings yet
- Subject Name: Electric Drive Subject Code: 6EE4-05: Introduction: Objective, Scope and Outcome of The CourseDocument9 pagesSubject Name: Electric Drive Subject Code: 6EE4-05: Introduction: Objective, Scope and Outcome of The CourseAbhíñåv PrâjãpätîNo ratings yet
- Solid State Drives Digital NotesDocument195 pagesSolid State Drives Digital NotesShanmukh VegiNo ratings yet
- ست خطوات العاكس لقيادة المحرك التعريفي ثلاث مراحلDocument113 pagesست خطوات العاكس لقيادة المحرك التعريفي ثلاث مراحلMOUHSSINE BEN HAMMOUNo ratings yet
- Electric MachinesDocument4 pagesElectric Machinesمحمد حسین فیض اللهیNo ratings yet
- IntroductionDocument3 pagesIntroductionaziz balochNo ratings yet
- Machines AssignmentDocument7 pagesMachines AssignmentCharles MuneneNo ratings yet
- Aed Unit3Document68 pagesAed Unit3Anser Pasha100% (1)
- Electric Motors of Use As Given at The W PDFDocument399 pagesElectric Motors of Use As Given at The W PDFjimNo ratings yet
- GOBINDADocument18 pagesGOBINDAPriyabrata MohantyNo ratings yet
- SUMMARYDocument11 pagesSUMMARYCyber-Mohd Salah ShotyNo ratings yet
- Module 5Document20 pagesModule 5yakomi suraNo ratings yet
- Introduction To Electric DrivesDocument75 pagesIntroduction To Electric DrivesVikas PooniaNo ratings yet
- Basic Electrical MachinesDocument4 pagesBasic Electrical MachinesGedion AvatarNo ratings yet
- Implementation of Boost Converter Applied For DC Motor DriveDocument51 pagesImplementation of Boost Converter Applied For DC Motor DriveLeri FirdianNo ratings yet
- Speed Control of DC Motor Using TriacDocument3 pagesSpeed Control of DC Motor Using Triackummarai saileelaNo ratings yet
- Implementation of Chopper Fed Speed Control of Sep PDFDocument6 pagesImplementation of Chopper Fed Speed Control of Sep PDFDayguel EvansNo ratings yet
- Output in Ac / DC Machine Installation and MeasurementDocument3 pagesOutput in Ac / DC Machine Installation and Measurementgwapoako9999999 999999No ratings yet
- Speed Control of A Conveyor BeltDocument24 pagesSpeed Control of A Conveyor BeltSumu Talal50% (2)
- Energy Efficient Appliances in A Residential Building - IEEE - SGBC2016 - ConfDocument6 pagesEnergy Efficient Appliances in A Residential Building - IEEE - SGBC2016 - ConfkannanNo ratings yet
- Chapter 1 - Electric DriveDocument76 pagesChapter 1 - Electric DriveNajihah YusofNo ratings yet
- A Quick Overview On Rotatory Brush and Brushless DC MotorsDocument4 pagesA Quick Overview On Rotatory Brush and Brushless DC Motorsmazza234No ratings yet
- Digital Control of A Three Phase Induction MotorDocument60 pagesDigital Control of A Three Phase Induction MotorKeshavamurthy MurthyNo ratings yet
- Module1 PDFDocument19 pagesModule1 PDFSetya ArdhiNo ratings yet
- A Control System of DC Motor Speed - Systematic ReviewDocument19 pagesA Control System of DC Motor Speed - Systematic ReviewCanizares1000No ratings yet
- ED - Notes Inroduction To Electric Drives-0Document8 pagesED - Notes Inroduction To Electric Drives-0Manideep ManiNo ratings yet
- CED CH 1 Introduction v1 03042018 095851AMDocument7 pagesCED CH 1 Introduction v1 03042018 095851AMRizwan AhemadNo ratings yet
- Development of A Microcontoller-Based Motor Speed Control System Using Intel 8051Document6 pagesDevelopment of A Microcontoller-Based Motor Speed Control System Using Intel 8051Nguyễn HòaNo ratings yet
- Part Ii: Electrical Drives Chapter TenDocument37 pagesPart Ii: Electrical Drives Chapter TenDawit Shimeles TesfayeNo ratings yet
- Industrial Drives and Control - ReviewerDocument10 pagesIndustrial Drives and Control - Reviewer21-09696No ratings yet
- Term Paper: Subject: Ele 102Document20 pagesTerm Paper: Subject: Ele 102Rajesh VermaNo ratings yet
- Final 3Document13 pagesFinal 3pk.piyush901No ratings yet
- Introduction To Electrical DrivesDocument18 pagesIntroduction To Electrical DrivesRohidah SaimunNo ratings yet
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesFrom EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNo ratings yet
- Electric Motor Control: DC, AC, and BLDC MotorsFrom EverandElectric Motor Control: DC, AC, and BLDC MotorsRating: 4.5 out of 5 stars4.5/5 (19)
- Integration of Large Scale Wind Energy with Electrical Power Systems in ChinaFrom EverandIntegration of Large Scale Wind Energy with Electrical Power Systems in ChinaNo ratings yet
- Parts of Speech (Updated) - 1Document33 pagesParts of Speech (Updated) - 1Ramzan MemonNo ratings yet
- Simplified Modified Compression Field Theory For Calculating Shear Strength of Reinforced Concrete ElementsDocument11 pagesSimplified Modified Compression Field Theory For Calculating Shear Strength of Reinforced Concrete ElementsTooma David100% (1)
- Penjelasan Tentang Direct and Indirect Speech TerlengkapDocument11 pagesPenjelasan Tentang Direct and Indirect Speech TerlengkapHasby HasbyNo ratings yet
- GTR StompDocument31 pagesGTR StompTalkingStringsNo ratings yet
- Ecology Study GuideDocument5 pagesEcology Study GuideJack TalleyNo ratings yet
- Learning Pentaho Data Integration 8 CE - Third EditionDocument827 pagesLearning Pentaho Data Integration 8 CE - Third EditionRobson Cardoso100% (4)
- Construction Safety and Health ProgramDocument17 pagesConstruction Safety and Health ProgramJohny Lou Luza100% (2)
- Project Budget Template 24Document4 pagesProject Budget Template 24koum juniorNo ratings yet
- Refrigerant Compressor - Remove and Install: Cerrar SIS Pantalla AnteriorDocument7 pagesRefrigerant Compressor - Remove and Install: Cerrar SIS Pantalla AnteriorDiego LiraNo ratings yet
- Samsung Un43tu8000fxzaDocument165 pagesSamsung Un43tu8000fxzaVandinei Santos67% (3)
- Everyday2 M8 S2 Student GrammarDocument2 pagesEveryday2 M8 S2 Student GrammarIvan MQNo ratings yet
- IBIG 04 04 Equity Value Enterprise Value Metrics MultiplesDocument95 pagesIBIG 04 04 Equity Value Enterprise Value Metrics MultiplesGabriel La MottaNo ratings yet
- Instrument of Government (1772) - WikipediaDocument3 pagesInstrument of Government (1772) - WikipediaMr. MeNo ratings yet
- Acronym PDFDocument2 pagesAcronym PDFmeirangongNo ratings yet
- Heating Cable Selection GuideDocument4 pagesHeating Cable Selection Guidehassan3012No ratings yet
- Dream DeferredDocument10 pagesDream DeferredJayesh JainNo ratings yet
- Test 1Document15 pagesTest 1Ngọc ÁnhNo ratings yet
- Atq Experiment 8 Chem 261 PDF FreeDocument7 pagesAtq Experiment 8 Chem 261 PDF FreeAliNo ratings yet
- UniTP Purple Book - Enhancing University Income Generation, Endowment and Waqf 2Document100 pagesUniTP Purple Book - Enhancing University Income Generation, Endowment and Waqf 2ezat ameerNo ratings yet
- Changes Guide: Premier Elite Series - From V2.11 To V3.00Document16 pagesChanges Guide: Premier Elite Series - From V2.11 To V3.00NaveenKumarReddyNo ratings yet
- Lesson 4 Module Title: Leadership TrainingDocument8 pagesLesson 4 Module Title: Leadership TrainingAnamae Detaro DarucaNo ratings yet
- DPP Engine Room Log Book Page#1Document1 pageDPP Engine Room Log Book Page#1Muhammad Suleman FaizNo ratings yet
- Electromagnetic Wave Propagation: A. Wave in Scalar FormDocument18 pagesElectromagnetic Wave Propagation: A. Wave in Scalar FormEWUNETU TEKEBANo ratings yet
- Soal CehDocument99 pagesSoal CehAditya PradanaNo ratings yet
- NCERT Solution For Cbse Class 9 Science Chapter 15 IMPROVEMENT IN FOOD RESOURCES PDFDocument7 pagesNCERT Solution For Cbse Class 9 Science Chapter 15 IMPROVEMENT IN FOOD RESOURCES PDFSanjiv KumarNo ratings yet
- Lab Heat Experment 2Document5 pagesLab Heat Experment 2حسين عمريNo ratings yet
- M MMMMMMMMMMDocument3 pagesM MMMMMMMMMMDavid R Paucara0% (1)
- CMT Electronic Heated ViscometerDocument1 pageCMT Electronic Heated ViscometerIBRAHIM ALMANLANo ratings yet
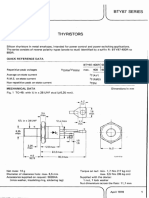
- BTY87 PhilipsDocument8 pagesBTY87 PhilipsmatheuzalexsanderNo ratings yet
- Skill Checklist Applying An Extremity RestraintDocument2 pagesSkill Checklist Applying An Extremity RestraintAsep BageurNo ratings yet