You might also like
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Skills-Based Assessment (Version A) : TopologyDocument5 pagesSkills-Based Assessment (Version A) : TopologyYagui100% (1)
- JK Water Leaks AllDocument144 pagesJK Water Leaks Allkacos2000100% (5)
- 2018 01 Green Urban AreaDocument16 pages2018 01 Green Urban AreaCerasella GoiaNo ratings yet
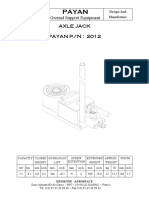
- Payan: Axle Jack PAYAN P/N: 2012Document38 pagesPayan: Axle Jack PAYAN P/N: 2012gmailNo ratings yet
- 3D Petrophysical Modeling Using Complex Seismic Attributes and Limited Well Log DataDocument5 pages3D Petrophysical Modeling Using Complex Seismic Attributes and Limited Well Log DataMehdl EftekharlNo ratings yet
- Artificial Neural Networks Calculate Magnetotelluric ParametersDocument4 pagesArtificial Neural Networks Calculate Magnetotelluric ParametersFarooq ArshadNo ratings yet
- Effects of Particle Swarm Optimization Algorithm Parameters For Structural Dynamic Monitoring of Cantilever BeamDocument7 pagesEffects of Particle Swarm Optimization Algorithm Parameters For Structural Dynamic Monitoring of Cantilever BeamFia PutriNo ratings yet
- Stability Analysis of Neural Networks-Based SystemDocument8 pagesStability Analysis of Neural Networks-Based SystemJ GNo ratings yet
- Seismic MultiatributDocument18 pagesSeismic MultiatributLINDA ARDITA PUTRINo ratings yet
- Diaz 1999Document14 pagesDiaz 1999Abdur RashidNo ratings yet
- Modelica-Based Modeling and Simulation of Satellite On-Orbit Deployment and Attitude ControlDocument9 pagesModelica-Based Modeling and Simulation of Satellite On-Orbit Deployment and Attitude ControlGkkNo ratings yet
- 2022 Herrera-Morales-Munoz-Ossa - Physics Education - 57 - 6 - 065010 (2022)Document8 pages2022 Herrera-Morales-Munoz-Ossa - Physics Education - 57 - 6 - 065010 (2022)William Cabrera CastroNo ratings yet
- Hybrid Training of Feed-Forward Neural Networks With Particle Swarm OptimizationDocument10 pagesHybrid Training of Feed-Forward Neural Networks With Particle Swarm OptimizationAbolfazl AbbasiyanNo ratings yet
- Application of Neural Networks in Coastal EngineeringDocument7 pagesApplication of Neural Networks in Coastal EngineeringSanjay Govind PatilNo ratings yet
- Col05030153 3Document3 pagesCol05030153 3ashupaulNo ratings yet
- Using Iterative Linear Regression Model To Time Series Models Zouaoui Chikr-el-Mezouar, Mohamed AttouchDocument14 pagesUsing Iterative Linear Regression Model To Time Series Models Zouaoui Chikr-el-Mezouar, Mohamed AttouchFransiscus DheniNo ratings yet
- 5 MSDocument5 pages5 MSmuhammad2003salmanNo ratings yet
- Applied Mathematics and Mechanics: (English Edition)Document10 pagesApplied Mathematics and Mechanics: (English Edition)asifiqbal84No ratings yet
- Least Squares Finite Element Model UpdatingDocument8 pagesLeast Squares Finite Element Model UpdatingMohammad Ahmad GharaibehNo ratings yet
- Computational Inversion of Electron TomoDocument30 pagesComputational Inversion of Electron TomoHenrikas KurylaNo ratings yet
- Cav 2001Document8 pagesCav 2001Daniel Rodriguez CalveteNo ratings yet
- Yang-Zhang1997 Article AHierarchicalAnalysisForRockEnDocument16 pagesYang-Zhang1997 Article AHierarchicalAnalysisForRockEnMaria FerentinouNo ratings yet
- Ororbia Maze LearningDocument10 pagesOrorbia Maze LearningTom WestNo ratings yet
- On The Implementation of The 0-1 Test For Chaos: Georg A. Gottwald Ian MelbourneDocument22 pagesOn The Implementation of The 0-1 Test For Chaos: Georg A. Gottwald Ian Melbourneherwins.stocksNo ratings yet
- About The Bounds of The Modal Frequency ResponseDocument4 pagesAbout The Bounds of The Modal Frequency ResponsetikelNo ratings yet
- The Particleincell MethodDocument29 pagesThe Particleincell MethodAntonio JuarezNo ratings yet
- Stable Fourier Neural Networks With Application To Modeling Lettuce GrowthDocument6 pagesStable Fourier Neural Networks With Application To Modeling Lettuce GrowthToprak AlemNo ratings yet
- MULTISCALE PROCESS MONITORING WITH SINGULAR SPECTRU - 2007 - IFAC Proceedings VoDocument6 pagesMULTISCALE PROCESS MONITORING WITH SINGULAR SPECTRU - 2007 - IFAC Proceedings VosmeykelNo ratings yet
- A Comparison of Extreme Learning Machines and Back-Propagation Trained Feed-Forward Networks Processing The Mnist DatabaseDocument4 pagesA Comparison of Extreme Learning Machines and Back-Propagation Trained Feed-Forward Networks Processing The Mnist DatabaseAnonymous qTIkKTNo ratings yet
- 2 Ijcseierdfeb20172Document10 pages2 Ijcseierdfeb20172TJPRC PublicationsNo ratings yet
- Automatic Detection of Welding Defects Using Deep PDFDocument11 pagesAutomatic Detection of Welding Defects Using Deep PDFahmadNo ratings yet
- Comparison of Estimates Using Record Statistics From Weibull Model: Bayesian and Non-Bayesian ApproachesDocument13 pagesComparison of Estimates Using Record Statistics From Weibull Model: Bayesian and Non-Bayesian ApproachesahmhamedNo ratings yet
- Applied Mathematics and Mechanics (English Edition)Document12 pagesApplied Mathematics and Mechanics (English Edition)airxNo ratings yet
- A Systolic Array Exploiting The Parallelisms of Artificial Neural Inherent NetworksDocument15 pagesA Systolic Array Exploiting The Parallelisms of Artificial Neural Inherent NetworksctorreshhNo ratings yet
- Forecasting with Neural Networks: A Statistical ApproachDocument38 pagesForecasting with Neural Networks: A Statistical Approachthiago_carvalho_7No ratings yet
- Nonlinear Effects in WDM Systems: Wang Jianquan, Wu Sunning, Cheng Xiaofei, Gu Wanyi, IEEE MemberDocument8 pagesNonlinear Effects in WDM Systems: Wang Jianquan, Wu Sunning, Cheng Xiaofei, Gu Wanyi, IEEE MembervuongdanghuyNo ratings yet
- Applied Neural Networks For Predicting Approximate Structural Response Behavior Using Learning and Design ExperienceDocument15 pagesApplied Neural Networks For Predicting Approximate Structural Response Behavior Using Learning and Design ExperienceRamprasad SrinivasanNo ratings yet
- Mat - 4Document23 pagesMat - 4Luis FuentesNo ratings yet
- SoftFRAC Matlab Library For RealizationDocument10 pagesSoftFRAC Matlab Library For RealizationKotadai Le ZKNo ratings yet
- Brigadnov 2005Document14 pagesBrigadnov 2005Iván Amaury S DNo ratings yet
- 1 s2.0 S0375947424000137 MainDocument9 pages1 s2.0 S0375947424000137 Mainopenjavier5208No ratings yet
- Robust Principle Component Analysis (RPCA) For Seismic Data DenoisingDocument5 pagesRobust Principle Component Analysis (RPCA) For Seismic Data DenoisingSourish SarkarNo ratings yet
- Deep Feedforward Networks Application To Patter RecognitionDocument5 pagesDeep Feedforward Networks Application To Patter RecognitionluizotaviocfgNo ratings yet
- 1 s2.0 S0895717701000486 MainDocument10 pages1 s2.0 S0895717701000486 MainJulee ShahniNo ratings yet
- Analisis de Un Espectro de Infrarojo en Una Molecula DiatomicaDocument6 pagesAnalisis de Un Espectro de Infrarojo en Una Molecula DiatomicaMAR�A F�TIMA COASACA CAMACHONo ratings yet
- E E 2 8 9 Lab Spectral Analysis in MatlabDocument12 pagesE E 2 8 9 Lab Spectral Analysis in MatlabvilukNo ratings yet
- Wagner, Holian, Massively Parallel Molecular Dynamics Simulations of Two-Dimensional Materials at High Strain RatesDocument6 pagesWagner, Holian, Massively Parallel Molecular Dynamics Simulations of Two-Dimensional Materials at High Strain RatesBishwajyoti DuttaMajumdarNo ratings yet
- 1 s2.0 S0096300317306641 MainDocument9 pages1 s2.0 S0096300317306641 MainChang YuNo ratings yet
- Modelling and Identification of A Non-Linear Saturated Magnetic Circuit: Theoretical Study and Experimental ResultsDocument14 pagesModelling and Identification of A Non-Linear Saturated Magnetic Circuit: Theoretical Study and Experimental ResultsGustavo LimaNo ratings yet
- Optmization Network For Matrix InversionDocument5 pagesOptmization Network For Matrix InversionSameeraBharadwajaHNo ratings yet
- Physical Review Letters: Phase OrganizationDocument4 pagesPhysical Review Letters: Phase OrganizationaldoNo ratings yet
- A Multi-Feature Visibility Processing Algorithm For Radio Interferometric Imaging On Next-Generation TelescopesDocument14 pagesA Multi-Feature Visibility Processing Algorithm For Radio Interferometric Imaging On Next-Generation TelescopesAnonymous FGY7goNo ratings yet
- Studies of Newmark Method For Solving Nonlinear SyDocument13 pagesStudies of Newmark Method For Solving Nonlinear SyThieuNo ratings yet
- Paper Akak - SI2011 16 - 18 Nov ProceedingDocument10 pagesPaper Akak - SI2011 16 - 18 Nov ProceedingZainuri NorliyatiNo ratings yet
- Fast Training of Multilayer PerceptronsDocument15 pagesFast Training of Multilayer Perceptronsgarima_rathiNo ratings yet
- Aashikpelokhai and MomoduDocument7 pagesAashikpelokhai and MomoduSandaMohdNo ratings yet
- Online Incremental Face Recognition Using Eigenface and Neural ClassifierDocument23 pagesOnline Incremental Face Recognition Using Eigenface and Neural ClassifierHuong LeNo ratings yet
- 1 s2.0 S0377042714002775 MainDocument13 pages1 s2.0 S0377042714002775 MainFaria RahimNo ratings yet
- CPG Control of A Tensegrity Morphing Structure For Bio Mimetic Applications by Bliss, Smith, IwasakiDocument5 pagesCPG Control of A Tensegrity Morphing Structure For Bio Mimetic Applications by Bliss, Smith, IwasakiTensegrity WikiNo ratings yet
- Crammer, Kulesza, Dredze - 2009 - Adaptive Regularization of Weighted VectorsDocument9 pagesCrammer, Kulesza, Dredze - 2009 - Adaptive Regularization of Weighted VectorsBlack FoxNo ratings yet
- AttachmentDocument12 pagesAttachmentRafael Cardoso100% (1)
- A Particle Swarm Optimization For Solving NLP/MINLP Process Synthesis ProblemsDocument6 pagesA Particle Swarm Optimization For Solving NLP/MINLP Process Synthesis ProblemsAhmed WestministerNo ratings yet
- Quantum Particle Swarm Optimization For ElectromagneticsDocument27 pagesQuantum Particle Swarm Optimization For ElectromagneticsbababhoNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Step 1. Login To Your Portal. Step 2. Click Self ServicesDocument2 pagesStep 1. Login To Your Portal. Step 2. Click Self ServicesRoberth Saénz Pérez AlvaradoNo ratings yet
- Referal Propect Data MiningDocument8 pagesReferal Propect Data MiningRoberth Saénz Pérez AlvaradoNo ratings yet
- Coin Services International Header 1Document1 pageCoin Services International Header 1Roberth Saénz Pérez AlvaradoNo ratings yet
- 1705 04103 PDFDocument44 pages1705 04103 PDFRoberth Saénz Pérez AlvaradoNo ratings yet
- Data Local 128 1.0Document278 pagesData Local 128 1.0Roberth Saénz Pérez AlvaradoNo ratings yet
- Bisie Tin Project Logistics Management DRA/ABM VouchersDocument1 pageBisie Tin Project Logistics Management DRA/ABM VouchersRoberth Saénz Pérez AlvaradoNo ratings yet
- Data Local 32 1Document18 pagesData Local 32 1Roberth Saénz Pérez AlvaradoNo ratings yet
- My Office Database: Company Name LocationDocument3 pagesMy Office Database: Company Name LocationRoberth Saénz Pérez AlvaradoNo ratings yet
- Data Local 32 1Document18 pagesData Local 32 1Roberth Saénz Pérez AlvaradoNo ratings yet
- Lomo Safety - PtoDocument1 pageLomo Safety - PtoRoberth Saénz Pérez AlvaradoNo ratings yet
- Libros FceDocument1 pageLibros FceRoberth Saénz Pérez AlvaradoNo ratings yet
- PeopleDocument10 pagesPeopleRoberth Saénz Pérez AlvaradoNo ratings yet
- Data Local 32 1Document18 pagesData Local 32 1Roberth Saénz Pérez AlvaradoNo ratings yet
- PeopleDocument10 pagesPeopleRoberth Saénz Pérez AlvaradoNo ratings yet
- Ms AuditDocument1 pageMs AuditRoberth Saénz Pérez AlvaradoNo ratings yet
- PeopleDocument10 pagesPeopleRoberth Saénz Pérez AlvaradoNo ratings yet
- Writing Part I: Fce Preparation Course - Writing Answer SheetDocument2 pagesWriting Part I: Fce Preparation Course - Writing Answer SheetRoberth Saénz Pérez AlvaradoNo ratings yet
- Cat Wheel Loaders: Machine DesignationDocument27 pagesCat Wheel Loaders: Machine DesignationRoberth Saénz Pérez AlvaradoNo ratings yet
- WritingDocument1 pageWritingRoberth Saénz Pérez AlvaradoNo ratings yet
- Mineria InformalDocument53 pagesMineria InformalYeison Eduardo Lizarve CahuanaNo ratings yet
- Claves TEST1Document2 pagesClaves TEST1Roberth Saénz Pérez AlvaradoNo ratings yet
- Cat Wheel Loaders: Machine DesignationDocument27 pagesCat Wheel Loaders: Machine DesignationRoberth Saénz Pérez AlvaradoNo ratings yet
- PeopleDocument10 pagesPeopleRoberth Saénz Pérez AlvaradoNo ratings yet
- 11angliyskiy YazikDocument7 pages11angliyskiy YazikRoberth Saénz Pérez AlvaradoNo ratings yet
- WritingDocument1 pageWritingRoberth Saénz Pérez AlvaradoNo ratings yet
- 11angliyskiy YazikDocument7 pages11angliyskiy YazikRoberth Saénz Pérez AlvaradoNo ratings yet
- Libros FceDocument1 pageLibros FceRoberth Saénz Pérez AlvaradoNo ratings yet
- Libros FceDocument1 pageLibros FceRoberth Saénz Pérez AlvaradoNo ratings yet
- Claves TEST1Document2 pagesClaves TEST1Roberth Saénz Pérez AlvaradoNo ratings yet
- ME453 CAD: Design ProjectDocument33 pagesME453 CAD: Design ProjectKaori MiyazonoNo ratings yet
- Floor PlanningDocument22 pagesFloor PlanningAnshumeek UpretiNo ratings yet
- Automatic smoke detector and fire alarm systemDocument7 pagesAutomatic smoke detector and fire alarm systemSwastik JainNo ratings yet
- AutoLaser UM enDocument151 pagesAutoLaser UM enCristian LopezNo ratings yet
- ParkinsonsDocument22 pagesParkinsonsHrudhay LuckyNo ratings yet
- 1.1 Huntleigh Doppler Models FD1 and FD3Document4 pages1.1 Huntleigh Doppler Models FD1 and FD3user 01No ratings yet
- IQ Range: Installation and Maintenance InstructionsDocument3 pagesIQ Range: Installation and Maintenance InstructionszeeshanNo ratings yet
- Quantitative Aptitude by SARVESH VERMADocument809 pagesQuantitative Aptitude by SARVESH VERMARajiv Ranjan0% (1)
- KDS 330 Built for Today, Ready for TomorrowDocument2 pagesKDS 330 Built for Today, Ready for TomorrowBill GetsNo ratings yet
- Oferta Bodor: Model (E) Pret ( Fara TVA) Garantie Modele CO2Document3 pagesOferta Bodor: Model (E) Pret ( Fara TVA) Garantie Modele CO2Librarie PapetarieNo ratings yet
- Electrical Tech. Juned Alam 18-8-2021Document2 pagesElectrical Tech. Juned Alam 18-8-2021anisaanNo ratings yet
- SCULPFUN S30 Series User ManualDocument72 pagesSCULPFUN S30 Series User Manualriello12No ratings yet
- Advances in Mechanical and Materials Technology: Kannan Govindan Harish Kumar Sanjay Yadav EditorsDocument1,422 pagesAdvances in Mechanical and Materials Technology: Kannan Govindan Harish Kumar Sanjay Yadav EditorsTao YUNo ratings yet
- L205 MA195 Numerical MethodsDocument2 pagesL205 MA195 Numerical MethodsBrayhan Anthony Rojas QuispeNo ratings yet
- Seeed Can Bus v2Document20 pagesSeeed Can Bus v2Geo AdmNo ratings yet
- Advantages and Disadvantages of Network Topology - 6 Types of Network Topology, 6 Best Network Topologies, Pros and Cons - A Plus TopperDocument15 pagesAdvantages and Disadvantages of Network Topology - 6 Types of Network Topology, 6 Best Network Topologies, Pros and Cons - A Plus TopperRichard ManyuliNo ratings yet
- RQ2203056Document1 pageRQ2203056suryaNo ratings yet
- ZXHN H108N (V2.5) Home Gateway Maintenance Management ManualDocument117 pagesZXHN H108N (V2.5) Home Gateway Maintenance Management Manualdeatmeteor50% (2)
- Evaluacion Lin100final 2021Document2 pagesEvaluacion Lin100final 2021Lioney Ortiz TorrezNo ratings yet
- 3000 LR NSK Double - Row - Ball - BearingDocument40 pages3000 LR NSK Double - Row - Ball - BearingÇağlar AYKUTALPNo ratings yet
- Share PricesDocument186 pagesShare PricesHarshul BhatiaNo ratings yet
- Valve Material Specification General Notes: Annexure-I (To VMS)Document5 pagesValve Material Specification General Notes: Annexure-I (To VMS)sabareeshNo ratings yet
- Inventaris Barang LaboratoriumDocument52 pagesInventaris Barang Laboratoriumlaboratorium rsparagonNo ratings yet
- PMP - Case Study 6Document9 pagesPMP - Case Study 6Ciise Cali HaybeNo ratings yet
- Fundamentals, Selection and Sizing of Standby Batteries PDFDocument53 pagesFundamentals, Selection and Sizing of Standby Batteries PDFRajarsi RayNo ratings yet
- Computer Science and TranslationDocument21 pagesComputer Science and TranslationMarina ShmakovaNo ratings yet