You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- PYTHON: Practical Python Programming For Beginners & Experts With Hands-on ProjectFrom EverandPYTHON: Practical Python Programming For Beginners & Experts With Hands-on ProjectRating: 5 out of 5 stars5/5 (3)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- A Concretização Da Revolução BurguesaDocument4 pagesA Concretização Da Revolução BurguesaLucia Maria Santana Silva100% (1)
- DevOps For Beginners: DevOps Software Development Method Guide For Software Developers and IT ProfessionalsFrom EverandDevOps For Beginners: DevOps Software Development Method Guide For Software Developers and IT ProfessionalsNo ratings yet
- Statement of Purpose Example 45Document8 pagesStatement of Purpose Example 45akshayNo ratings yet
- Build a Whatsapp Like App in 24 Hours: Create a Cross-Platform Instant Messaging for AndroidFrom EverandBuild a Whatsapp Like App in 24 Hours: Create a Cross-Platform Instant Messaging for AndroidRating: 3.5 out of 5 stars3.5/5 (5)
- SRS - How to build a Pen Test and Hacking PlatformFrom EverandSRS - How to build a Pen Test and Hacking PlatformRating: 2 out of 5 stars2/5 (1)
- Debugging Embedded and Real-Time Systems: The Art, Science, Technology, and Tools of Real-Time System DebuggingFrom EverandDebugging Embedded and Real-Time Systems: The Art, Science, Technology, and Tools of Real-Time System DebuggingRating: 5 out of 5 stars5/5 (1)
- Unofficial TIBCO® Business WorksTM Interview Questions, Answers, and Explanations: TIBCO Certification Review QuestionsFrom EverandUnofficial TIBCO® Business WorksTM Interview Questions, Answers, and Explanations: TIBCO Certification Review QuestionsRating: 3.5 out of 5 stars3.5/5 (2)
- Inteligencia Artificial en El Sector AdminitrativoDocument12 pagesInteligencia Artificial en El Sector AdminitrativoDanny Mendoza100% (1)
- Hands-on GitHub Actions: Implement CI/CD with GitHub Action Workflows for Your ApplicationsFrom EverandHands-on GitHub Actions: Implement CI/CD with GitHub Action Workflows for Your ApplicationsNo ratings yet
- Computer Graphics: Exploring the Intersection of Computer Graphics and Computer VisionFrom EverandComputer Graphics: Exploring the Intersection of Computer Graphics and Computer VisionNo ratings yet
- Absolute Beginner's Python Programming: The Illustrated Guide to Learning Computer ProgrammingFrom EverandAbsolute Beginner's Python Programming: The Illustrated Guide to Learning Computer ProgrammingRating: 1 out of 5 stars1/5 (1)
- GPU-based Parallel Implementation of Swarm Intelligence AlgorithmsFrom EverandGPU-based Parallel Implementation of Swarm Intelligence AlgorithmsNo ratings yet
- Image Classification: Step-by-step Classifying Images with Python and Techniques of Computer Vision and Machine LearningFrom EverandImage Classification: Step-by-step Classifying Images with Python and Techniques of Computer Vision and Machine LearningNo ratings yet
- Agent-based Spatial Simulation with NetLogo, Volume 2: Advanced ConceptsFrom EverandAgent-based Spatial Simulation with NetLogo, Volume 2: Advanced ConceptsNo ratings yet
- Programming Microcontrollers with Python: Experience the Power of Embedded PythonFrom EverandProgramming Microcontrollers with Python: Experience the Power of Embedded PythonNo ratings yet
- Basics of Python Programming: Embrace the Future of PythonFrom EverandBasics of Python Programming: Embrace the Future of PythonNo ratings yet
- Learn to Program with Kotlin: From the Basics to Projects with Text and Image ProcessingFrom EverandLearn to Program with Kotlin: From the Basics to Projects with Text and Image ProcessingNo ratings yet
- Python Advanced Programming: The Guide to Learn Python Programming. Reference with Exercises and Samples About Dynamical Programming, Multithreading, Multiprocessing, Debugging, Testing and MoreFrom EverandPython Advanced Programming: The Guide to Learn Python Programming. Reference with Exercises and Samples About Dynamical Programming, Multithreading, Multiprocessing, Debugging, Testing and MoreNo ratings yet
- Hands-on Go Programming: Learn Google’s Golang Programming, Data Structures, Error Handling and Concurrency ( English Edition)From EverandHands-on Go Programming: Learn Google’s Golang Programming, Data Structures, Error Handling and Concurrency ( English Edition)Rating: 5 out of 5 stars5/5 (1)
- Action Recognition: Step-by-step Recognizing Actions with Python and Recurrent Neural NetworkFrom EverandAction Recognition: Step-by-step Recognizing Actions with Python and Recurrent Neural NetworkNo ratings yet
- Machine Learning with Python: A Comprehensive Guide with a Practical ExampleFrom EverandMachine Learning with Python: A Comprehensive Guide with a Practical ExampleNo ratings yet
- Mastering Python Programming: A Comprehensive Guide: The IT CollectionFrom EverandMastering Python Programming: A Comprehensive Guide: The IT CollectionRating: 5 out of 5 stars5/5 (1)
- Digital Signal Processing System Design: LabVIEW-Based Hybrid ProgrammingFrom EverandDigital Signal Processing System Design: LabVIEW-Based Hybrid ProgrammingRating: 5 out of 5 stars5/5 (1)
- Multi-Platform Graphics Programming with Kivy: Basic Analytical Programming for 2D, 3D, and Stereoscopic DesignFrom EverandMulti-Platform Graphics Programming with Kivy: Basic Analytical Programming for 2D, 3D, and Stereoscopic DesignNo ratings yet
- Computer Vision with Maker Tech: Detecting People With a Raspberry Pi, a Thermal Camera, and Machine LearningFrom EverandComputer Vision with Maker Tech: Detecting People With a Raspberry Pi, a Thermal Camera, and Machine LearningNo ratings yet
- Collection of Raspberry Pi ProjectsFrom EverandCollection of Raspberry Pi ProjectsRating: 5 out of 5 stars5/5 (1)
- Mastering Go: Navigating the World of Concurrent ProgrammingFrom EverandMastering Go: Navigating the World of Concurrent ProgrammingNo ratings yet
- Practical Bootstrap: Learn to Develop Responsively with One of the Most Popular CSS FrameworksFrom EverandPractical Bootstrap: Learn to Develop Responsively with One of the Most Popular CSS FrameworksNo ratings yet
- The Art of Assembly Language Programming Using PIC® Technology: Core FundamentalsFrom EverandThe Art of Assembly Language Programming Using PIC® Technology: Core FundamentalsNo ratings yet
- G10SPure说明书Document19 pagesG10SPure说明书Michael DingNo ratings yet
- Notes To The Financial StatementsDocument9 pagesNotes To The Financial StatementsANDREA NATALIA PINZON CHAVARRIONo ratings yet
- Brisures Mep PJDocument164 pagesBrisures Mep PJPretre Matrae CréationNo ratings yet
- 7 Beneficios de Implementar Un SGSSTDocument3 pages7 Beneficios de Implementar Un SGSSTClaudia Victoria Alvarado GonzalezNo ratings yet
- Ficha Diagnostica de TutoriaDocument3 pagesFicha Diagnostica de TutoriaNancy Lilly Paredes0% (1)
- 23T0344 Chavez Liliana PDFDocument282 pages23T0344 Chavez Liliana PDFMarianela Garcia MoreiraNo ratings yet
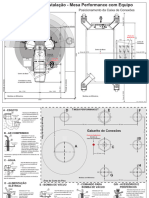
- Gabarito Da Caixa de Conexoes Performance PT R00Document2 pagesGabarito Da Caixa de Conexoes Performance PT R00Rubem AlmeidaNo ratings yet
- Análisis de La Calidad de Señal en Una Red Wifi Con La Herramienta NetstumblerDocument12 pagesAnálisis de La Calidad de Señal en Una Red Wifi Con La Herramienta NetstumblerRoxana Janneth MoralesNo ratings yet
- What Is Strategy? Explain The Various Level of Strategy in An OrganizationDocument3 pagesWhat Is Strategy? Explain The Various Level of Strategy in An OrganizationHari Prathap ReddyNo ratings yet
- MetabuscadoresDocument15 pagesMetabuscadoresEtzi GANo ratings yet
- Ims QuestionDocument10 pagesIms QuestionPavel ViktorNo ratings yet
- Booklet Business Plan 2020 v3.0 Amend As of 021219Document131 pagesBooklet Business Plan 2020 v3.0 Amend As of 021219Zamizan BNo ratings yet
- Cartilla - Fundamentos de Geología y Geotécnia PDFDocument59 pagesCartilla - Fundamentos de Geología y Geotécnia PDFAngelica Caceres PradaNo ratings yet
- Tabla de GoleadoresDocument3 pagesTabla de Goleadoresharoldfranco1410No ratings yet
- Porter Five Forces: Competitive Rivalry or CompetitionDocument3 pagesPorter Five Forces: Competitive Rivalry or CompetitionShubham MohnotNo ratings yet
- r05220304 Thermal Engineering IDocument8 pagesr05220304 Thermal Engineering IandhracollegesNo ratings yet
- Medios Que Se Utilizan para Promoción de SaludDocument3 pagesMedios Que Se Utilizan para Promoción de SaludSebastian Galicia100% (1)
- 2019 Edital 001 Resultado Preliminar Titulos Retificado 2019-06-24Document34 pages2019 Edital 001 Resultado Preliminar Titulos Retificado 2019-06-24Ana Cláudia AraujoNo ratings yet
- CuribayaDocument75 pagesCuribayaErika Laura Najar100% (3)
- Unit 5 - Argumentative Essay PDFDocument14 pagesUnit 5 - Argumentative Essay PDFHeav SanathNo ratings yet
- Camara RefrigeracionDocument5 pagesCamara RefrigeracionmecatronNo ratings yet
- ZA550KL RF Hardware Trouble Shooting GuideDocument42 pagesZA550KL RF Hardware Trouble Shooting GuideWenderson FeltrinNo ratings yet
- Catenative Verbs +presentacionDocument13 pagesCatenative Verbs +presentacionAlejandra SerranoNo ratings yet
- Diagnostic Grammar Test-CopiarDocument6 pagesDiagnostic Grammar Test-CopiarJuliana PachonNo ratings yet
- Programacion Didactica Lomloe 1secundaria GeografiaehistoriaDocument82 pagesProgramacion Didactica Lomloe 1secundaria GeografiaehistoriaMvp Lolo100% (1)
- Materi Webinar Series #2 DR Wilman BRINDocument69 pagesMateri Webinar Series #2 DR Wilman BRINDeddy LesmanaNo ratings yet
- Tesis de Maestria. Luis Grieco. FinalDocument229 pagesTesis de Maestria. Luis Grieco. FinalRocío BarcelóNo ratings yet